
李罗兰, 何川 , 谭玉阳
, 谭玉阳
北京大学石油与天然气研究中心, 北京大学地球与空间科学学院, 北京 100871
Luolan LI, Chuan HE
中图分类号:
P315
通讯作者:
Corresponding authors:
收稿日期:
2015-10-27
修回日期:
2015-12-30
网络出版日期:
2016-04-27
版权声明:
2017 《北京大学学报(自然科学版)》编辑部 《北京大学学报(自然科学版)》编辑部 所有
基金资助:
展开
摘要 通过模型试验, 分别讨论地面、井下观测系统以及二者的组合对于定位结果的影响。试验结果表明, 联合采用地面与井下观测系统能够有效提高震源定位精度。在采用井下观测系统的基础上, 对比几种常用 目标函数的应用效果, 并在更有效的走时残差计算方法基础上, 提出一种新的目标函数。模型数据及实际资 料的处理结果表明, 提出的目标函数在水平方向以及垂向上均具有较好的收敛性, 其震源定位结果也更准确、可靠。
关键词:
Abstract Through synthetic data tests, the influence on source location results of surface and downhole recording systems are discussed, as well as the combination of both. The results indicate that joint use of surface and downhole recording systems can significantly improve the location accuracy. With the downhole recording system, the location results obtained by adopting different objective functions in source location algorithm are compared. Moreover, a new objective function is also proposed. The effectiveness of the new objective function is tested on synthetic and real data sets. The results demonstrate that this objective function shows better convergency in both horizontal and vertical directions, and it can produce more reliable location results.
Keywords:
微地震监测技术是以声发射现象和地震学理论为基础, 通过观测分析生产活动中产生的微小地震事件, 监测生产活动的影响效果以及地下状态的地球物理技术[1]。近年来, 随着非常规油气开发受到越来越多的重视, 加之大型水力压裂技术的不断进步, 微地震监测技术在石油天然气行业的应用也愈加广泛。利用微地震监测技术, 不仅能够对地下裂缝的形态特性和分布规律进行分析, 还可以对储层有效改造体积及未来生产趋势进行估算。因此, 该技术对于非常规油气藏的有效开发具有重要的指导作用[2-3]。
微地震震源定位是微地震监测技术的重要内容之一。一般来说, 影响震源定位精度的主要因素包括观测系统布设位置、初至拾取误差、速度模型以及定位方法等[2,4]。按照观测系统不同, 微地震监测可以分为地面观测和井下观测两种[5]。近年来, 国外一些学者针对观测系统对震源定位精度的影响开展了一系列研究[4,6-8]。例如, Eisner 等[6]对均匀介质模型中地面观测系统与井下观测系统的定位结果进行了不确定性分析, Zimmer 等[4]和 Maxwell[7]研究了层状介质模型中井下监测系统定位误差的影响因素, Jansky 等[8]分析了联合地面与井下观测系统进行微地震监测的可行性。本文在总结前人研究成果的基础上, 通过模型试验, 对比分析不同观测系统对震源定位精度的影响。
震源定位方法是影响定位结果精度的另一个重要因素。目前, 大多数震源定位算法都采用观测走时与理论走时之间的走时残差作为目标函数, 认为目标函数最小值对应的空间位置为震源位置[9-11]。由于震源定位直接依赖于对空间中大量点的走时残差的比较, 因此, 走时残差的计算方法对定位结果的准确性会产生较大影响[12]。本文采用模型试验, 对 3 种常用的走时残差计算方法进行对比分析, 并在更有效的走时残差计算方法基础上, 提出一种新的目标函数。此外, 本文分别讨论初至拾取误差以 及速度模型对目标函数的影响。最后, 通过实际资 料的分析, 进一步验证本文提出的目标函数的有效性。
目前, 常用的震源定位方法是通过计算走时残差来确定微地震事件的震源位置[12-15]。走时残差即观测走时与理论走时之差, 其中观测走时可由检波器记录到的微地震事件P波(或S波)初至到时减去发震时刻得到。由于微地震事件的发震时刻和震源位置一样, 都是未知(待求)参数, 某些定位方法将最早记录到的P波(或S波)初至到时作为发震时刻, 但这种方法过于依赖参考发震时刻的精度[12]。本文采用观测到时与理论走时之差的平均值作为发震时刻的估计值[14-15], 从而得到单一震相的走时残差计算公式(以P波为例):
${{F}_{1}}=\sqrt{\frac{1}{N}\sum\limits_{i=1}^{N}{{{(T_{\text{P}}^{i}-t_{\text{P}}^{i}-{{T}_{\text{P}0}})}^{2}}}},$ (1)
${{T}_{\text{P}0}}=\frac{1}{N}\sum\limits_{i=1}^{N}{(T_{\text{P}}^{i}-t_{\text{P}}^{i})},$ (2)
其中, TPi为实际观测到时, tPi为理论计算走时, TP0为估计发震时刻, N 为检波器数目。将式(1)作为目标函数, 利用网格搜索算法找到其最小点, 该最小点所对应的空间位置即为震源位置。
研究表明, 要确定震源的空间位置, 需采用至少包含 3 个检波器, 且覆盖范围足够大的观测系统来接收信号[7]。微地震信号通常微弱, 极易受到周围环境噪声的影响或遮蔽。虽然震源附近信号的信噪比较高, 但是, 随着波的传播, 信号衰减严重, 信噪比也逐渐减小。此外, 由于震源沿不同方向辐射出的能量不同, 在不同位置布设的观测系统接收到的信号能量也不同[7,16]。微地震监测中经常采用的观测系统可以分为两类: 地面观测系统和井下观测系统。井下观测系统通常采用一个包含 10~20 级的三分量检波器串, 实际监测时, 将该检波器串布设在压裂井邻近的一口直井或水平井中进行观测。地面观测系统有星状布设及网状布设两种方式, 其中每一条测线上均布设几十乃至上百个单分量检波器。除上述两种常用的观测系统外, 还有一种浅井观测方式, 即在深度在 100 m 左右的几口浅井中布设多级三分量检波器。这种观测方式能够有效降低地表低速带对微地震信号的吸收和衰减作用。表 1列举上述3种观测方式的优缺点, 在实际应用时需要根据工区的实际条件确定最适合的观测系统。下面采用模型数据来讨论不同观测系统对震源定位结果的影响。
表1 微地震不同观测方式特点的比较
Table 1 Comparison of the features of different microseismic recording systems
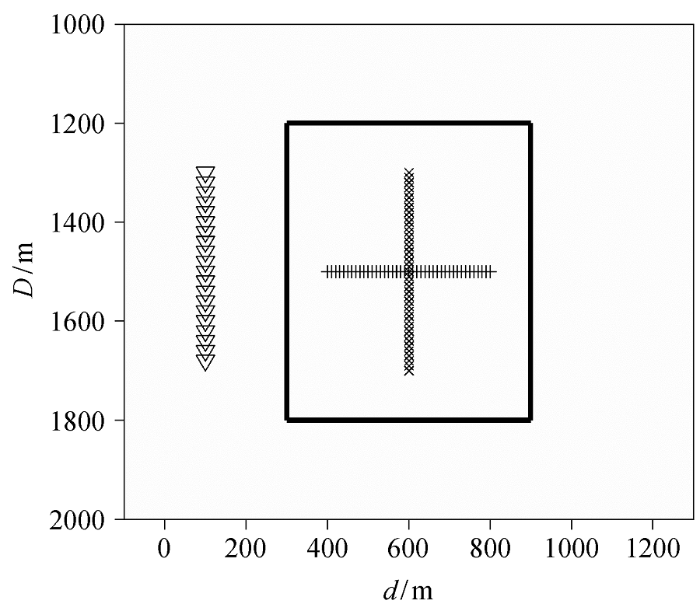
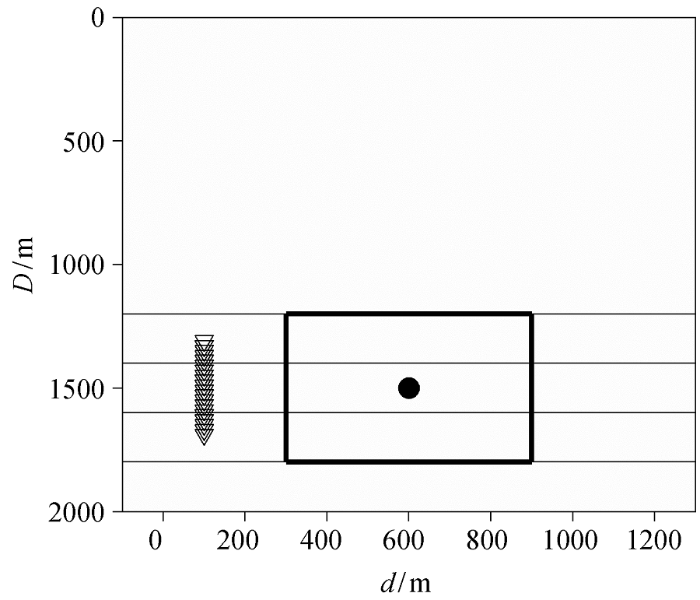
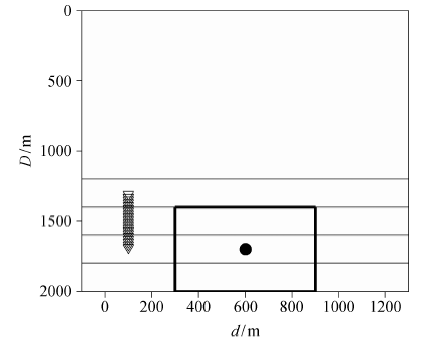
本文采用模型数据, 分析不同观测系统对震源定位结果的影响。算例采用二维均匀速度地层模型, 其P波速度为 2000 m/s。地面观测系统为一个120 级的检波器阵列, 其级间距为 10 m, 首级位置为(0, 10) m; 井下观测系统为一个 20 级的检波器串, 其级间距为20 m, 首级位置为(100, 1300) m。假设震源位置为(600, 1500) m, 发震时刻为 100 s, 利用射线追踪算法, 计算出由该震源位置发出的地震波传播到各个检波器的观测到时。然后, 在震源附近选定一个目标区域, 并对其进行网格划分。该目标区域的范围为水平方向(距离) 300~900 m, 垂向(深度) 1200~1800 m; 网格大小为1 m×1 m。对于目标区域中的每个网格点, 利用射线追踪算法计算其到达各个检波器的理论走时, 并根据式(1)计算其对应的目标函数值。当目标区域中各个网格点的目标函数值均算得后, 其中最小值点的位置即为震源位置。
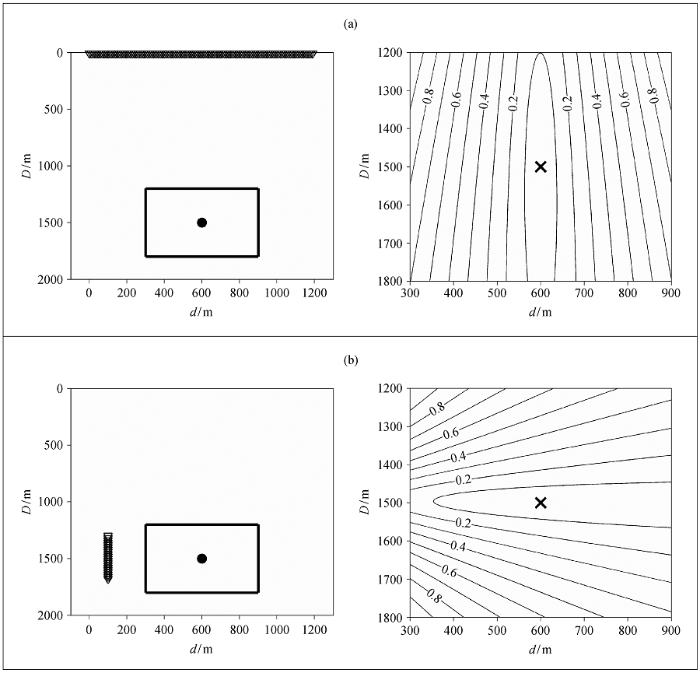
图 1为地面及井下观测系统布设示意图及其对应的目标函数等值线图。可以看出, 由于本次试验采用没有误差干扰的理想模型, 因此两种观测系统均能准确定位震源位置。然而, 通过对比发现, 它们所对应的目标函数等值线的分布规律存在较大差异。若仅采用地面观测系统(图 1(a)), 目标函数等值线以实际震源位置为中心, 在垂向上呈条带状对称分布, 表明此时目标函数在垂向上不够收敛, 所确定的震源位置在深度方面可能存在较大误差。若仅采用井下观测系统(图 1(b)), 目标函数在水平方向上不够收敛, 其震源定位结果在距离方面可能存在较大误差。
图1 地面(a)及井下(b)观测系统布设示意图及其对应的目标函数等值线倒三角形表示检波器位置, 矩形框表示网格搜索的目标区域, 圆点表示真实震源位置, “×”号表示目标函数最小值点的位置(即反演得到的震源位置), 下同 Fig. 1 Geometries of the surface (a) and downhole (b) recording systems and their corresponding objective function contour plots
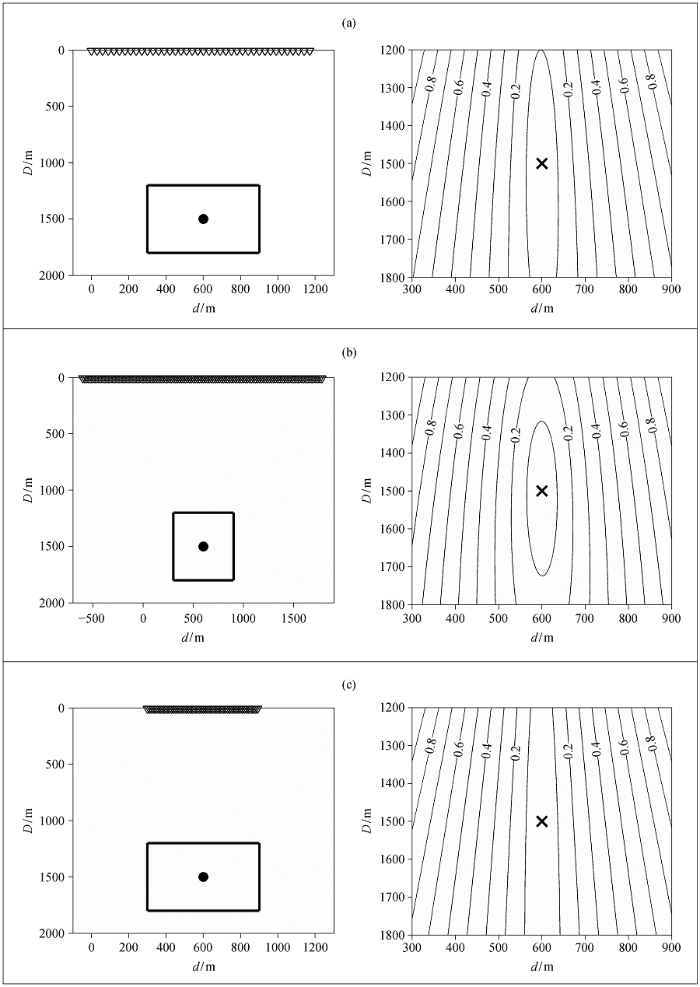
在采用地面观测系统的基础上, 我们研究检波器的数目及间距对震源定位目标函数的影响。将观测系统采用的检波器数目减少到 40 级, 并且将检波器之间的间距增大到 30 m, 以保持水平方向上的观测角度不变。该观测系统示意图及其对应的目标函数等值线如图 2(a)所示。对比图 1(a)与图 2(a)可以看出, 二者的目标函数等值线基本上吻合, 表明在观测角度相同的条件下, 改变观测系统内检波器的数目及间距不会对目标函数等值线的形态分布产生较大的影响。为了检验观测角度对目标函数的影响, 在保持检波器数目不变的条件下, 将图 1(a)中观测系统的检波器间距增大到20 m, 调整后的观测系统示意图及其目标函数等值线如图 2(b)所示; 然后, 保持图 1(a)中观测系统的检波器间距不变, 将检波器数目减少到 60 级, 其对应的目标函数等值线如图 2(c)所示。对比图 1(a)与图 2(b)和(c)可以看出, 在增大观测系统的观测角度后, 目标函数在垂向上的收敛性得到明显提高; 减小观测角度后, 目标函数在垂向上的收敛性也随之降低。然而, 我们发现, 尽管通过调整观测系统能够令目标函数在垂向上的收敛性得到改善, 但是仍然无法达到令人满意的结果。
图2 不同地面观测系统布设示意图及其对应的目标函数等值线 Fig. 2 Geometries of different surface recording systems and their corresponding objective function contour plots
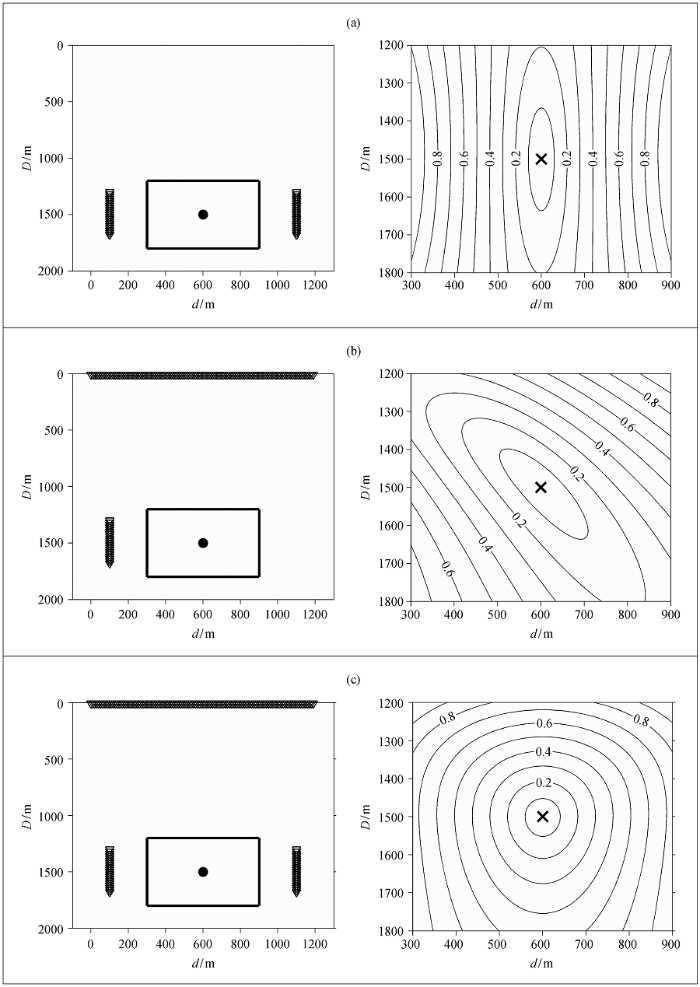
由于通过调整观测系统无法取得令人满意的结果, 我们研究不同观测系统的组合对目标函数的影响。例如, 针对图 1(b)所示的井下观测系统, 我们在震源的另一侧增加一组井下检波器串(图 3(a)), 通过分析目标函数等值线可以看出, 其水平方向上的收敛性得到明显加强, 但是垂向上的收敛性有所降低。若将地面观测系统与井下观测系统联合使用(图 3(b)和(c)), 目标函数的收敛性能够得到显著提高。当采用图 3(c)所示的观测系统时, 目标函数的收敛范围最为集中, 表明采用该观测系统的定位效果最佳。在实际应用过程中, 由于受到测量仪器、施工条件等因素的影响, 极少情况下能够采用图3(c)所示的最优观测系统。目前, 在微地震监测中更多采用的是图 1(b)所示的井下观测系统。因此, 下面将在采用该观测系统的基础上, 对目标函数做进一步讨论。
图3 不同观测系统组合及其对应的目标函数等值线 Fig. 3 Combinations of different recording systems and their corresponding objective function contour plots
在实际应用中, 由于极少能够采用最优的观测系统, 因此, 想要得到准确的震源位置, 定位目标函数的选择就至关重要。在震源定位中, 目标函数通常选用观测走时与理论走时的残差。式(1)为 P波走时残差的计算公式, 同理可以得到S波走时残差的计算公式:
${{F}_{2}}=\sqrt{\frac{1}{N}\sum\limits_{i=1}^{N}{{{(T_{\text{S}}^{i}-t_{\text{S}}^{i}-{{T}_{\text{S}0}})}^{2}}}},$ (3)
${{T}_{\text{S}0}}=\frac{1}{N}\sum\limits_{i=1}^{N}{(T_{\text{S}}^{i}-t_{\text{S}}^{i})},$ (4)
其中, TSi为实际观测到时, tSi为理论计算走时, TS0为估计发震时刻。式(1)和(3)均利用单一震相的走时信息, 然而, 一个微地震事件通常既包含 P 波, 又包含 S 波, 因此, 我们也可以利用二者的到时差来计算走时残差:
${{F}_{3}}=\sqrt{\frac{1}{N}{{\sum\limits_{i=1}^{N}{\left[ (T_{\text{P}}^{i}-T_{\text{S}}^{i})-(t_{\text{P}}^{i}-t_{\text{S}}^{i}) \right]}}^{2}}}$。 (5)
利用式(5)可以去除发震时刻误差带来的影响。
本文将式(1)、(3)和(5)结合起来, 提出一种更为有效的走时残差计算方法。由于采用式(1)和(3)计算的走时残差与采用式(5)的计算结果在数值量级上可能相差较大, 因此, 为了保证各部分对总的目标函数的贡献差别不大, 我们利用一个均衡系数将三者结合起来, 即
${{F}_{4}}=\sqrt{\frac{\gamma }{N}\sum\limits_{i=1}^{N}{{\left[ {{(T_{\text{P}}^{i}-t_{\text{P}}^{i}-{{T}_{\text{P}0}})}^{2}}+{{(T_{\text{S}}^{i}-t_{\text{S}}^{i}-{{T}_{\text{S}0}})}^{2}} \right]}/{2}\;}+\frac{(1-\gamma )}{N}\sum\limits_{i=1}^{N}{{{\left[ (T_{\text{P}}^{i}-T_{\text{S}}^{i})-(t_{\text{P}}^{i}-t_{\text{S}}^{i}) \right]}^{2}}}},$ (6)
其中, γ为均衡系数, 取值范围为0~1。由于γ的选取与震源位置、观测系统位置以及地层模型等因素有关, 在实际应用中需要根据具体情况建立模型, 通过正演, 模拟估算γ的大致数值。下面将采用模型数据来对比分析上述几类目标函数的应用效果。
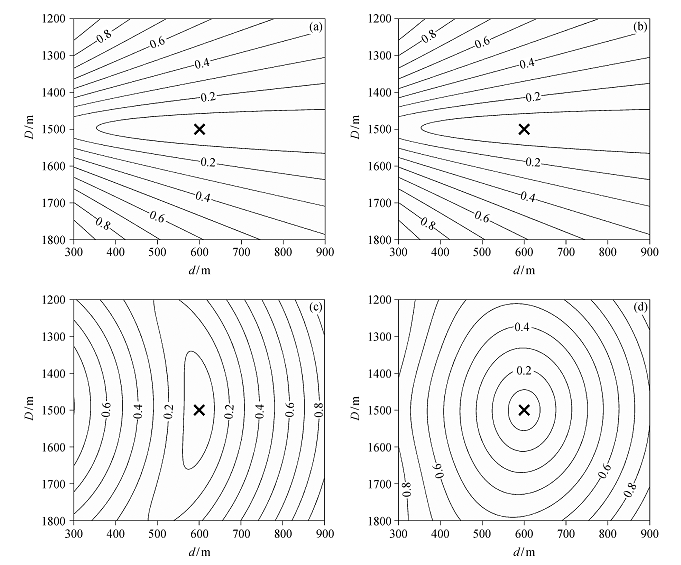
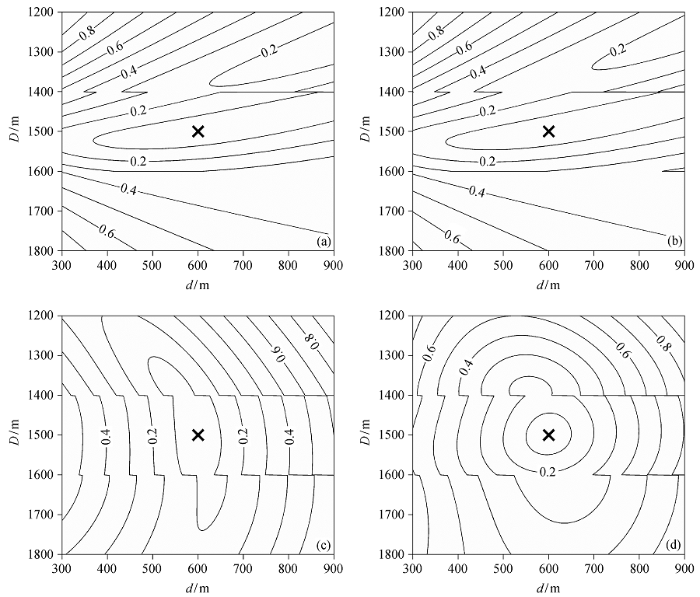
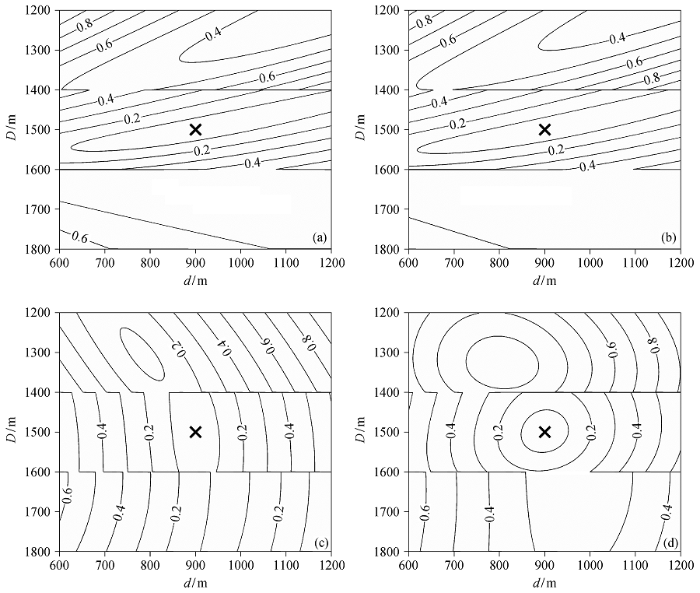
本试验采用的地层模型及观测系统如图 1(b)所示, 其中假设 S 波速度为 1200 m/s, 其余参数均保持不变。图 4 为分别采用式(1)、(3)、(5)和(6)作为目标函数进行震源定位的结果。可以看出, 在没有初至拾取误差影响的情况下, 4种目标函数均能够准确定位震源位置。然而, 通过分析各个目标函数的等值线发现, 式(1)和(3)在水平方向上的收敛性较差(图 4(a)和(b))。据此可以推断, 当有初至拾取误差存在时, 二者的震源定位结果在距离方面可能存在较大误差。同理, 从图 4(c)可知, 式(5)在垂向上的收敛性较差, 表明其对于震源深度的确定可能不够准确。相比较而言, 式(6)的收敛性最好(图4(d)), 表明采用式(6)作为目标函数可以得到更加准确的震源定位结果。
图4 目标函数等值线(单层模型结果) (a)~(d)分别为采用式(1)、(3)、(5)和(6)作为目标函数的等值线 Fig. 4 Contour plots of the objective functions (results of single layer model)
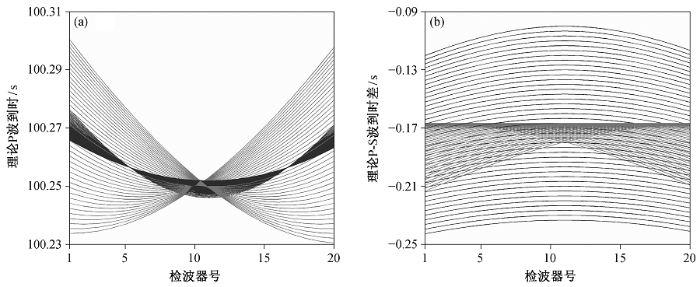
为了进一步解释上述结果, 我们过震源点沿水平方向和垂向分别选取两组测试网格点, 如图 5 中“+”号和“×”号所示, 其范围均为 400 m。在这些网格点处, 正演得到的理论 P 波到时以及 P-S 波到时差如图 6 所示。从图 6(a)可以看出, 与横向上的位置变化相比, P 波到时对纵向上的位置变化更加敏感。因此, 根据 P 波到时能够更加准确地确定震源深度。同理, 从图6(b)可知, P-S波到时差对横向上的位置变化更加敏感, 表明利用它可以更加准确地确定至震源的距离(震源距)。
图6 理论P波到时(a)及 P-S 波到时差(b) 灰色和黑色曲线分别对应 Fig. 6 Calculated P-wave arrival times (a) and P-S separation times (b)
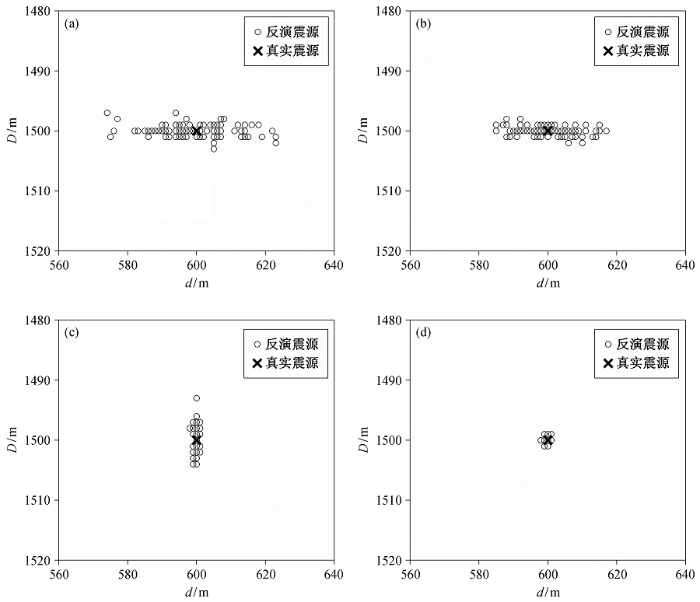
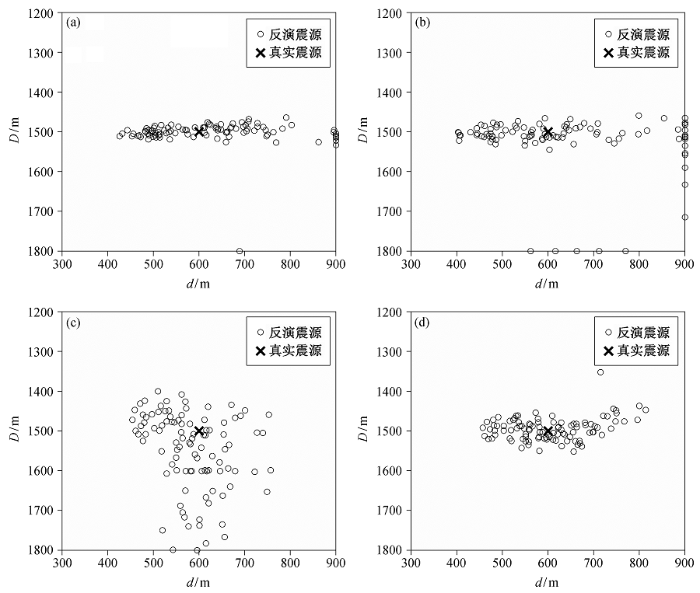
上述结论均是在假设观测到时不含任何误差的前提下得到的。然而, 在实际应用中, 由于环境噪声的存在及人为因素的影响, 观测到时中不可避免地会存在初至拾取误差。因此, 为了尽可能地接近真实情况, 我们采用一组随机数(其平均值为 0, 方差为 0.0005)来表示初至拾取误差, 并将该组随机数添加到正演到时中, 模拟实际数据。此外, 为了避免随机性, 得到更具普遍性的结论, 我们重复上述步骤, 得到 100 组合成到时数据, 其中每组合成数据加入不同的随机噪声(其均值和方差均保持不变)。对这 100 组合成到时数据采用不同目标函数进行震源定位, 结果如图7所示。
图7 合成数据震源定位结果(a)~(d)分别为采用式(1)、(3)、(5)和(6)作为目标函数时的震源定位结果 Fig. 7 Source location results of the synthetic data set
对比图7与图4可知, 反演震源位置与目标函数等值线的分布规律基本上一致: 式(1)和(3)在水平方向上的收敛性较差, 其震源定位结果在距离方面存在较大误差; 式(5)在垂向上的收敛性较差, 其震源定位结果在深度方面存在较大误差; 式(6)的收敛性最好, 其震源定位结果的误差最小。
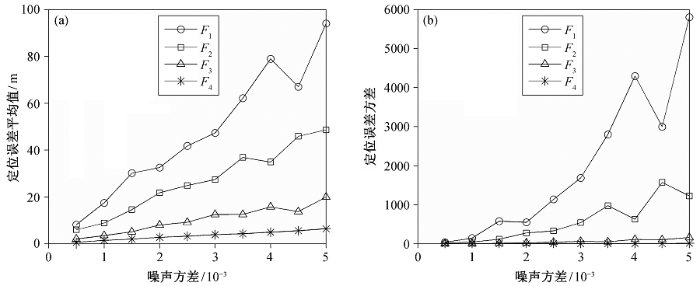
为了进一步验证式(6)的抗噪性, 我们采用另外9 组随机数来表示初至拾取误差。这些随机噪声序列的平均值均为 0, 其方差依次为 0.001, 0.0015, 0.002, 0.0025, 0.003, 0.0035, 0.004, 0.0045 和0.005。重复上述步骤, 可以得到900组合成到时数据。对这些合成到时数据采用不同目标函数进行震源定位, 其定位误差(即反演震源与真实震源的距离)与噪声方差之间的关系如图 8 所示。从图 8 可以看出, 随着噪声方差的增大, 各个目标函数的定位误差也增大, 但在相同的噪声条件下, 式(6)定位误差的平均值和方差均最小, 表明式(6)受噪声影响较小, 其震源定位结果更准确。
图8 不同目标函数的震源定位误差平均值及方差对比 Fig. 8 Comparison of the means and variances of the location errors of different objective functions
速度模型是影响震源定位结果的另一个重要因素。在实际应用中, 由于往往无法得到有关地层速度模型的详细信息, 通常将实际介质假设为一个水平层状模型。下面将讨论该速度模型对不同目标函数的震源定位结果的影响。
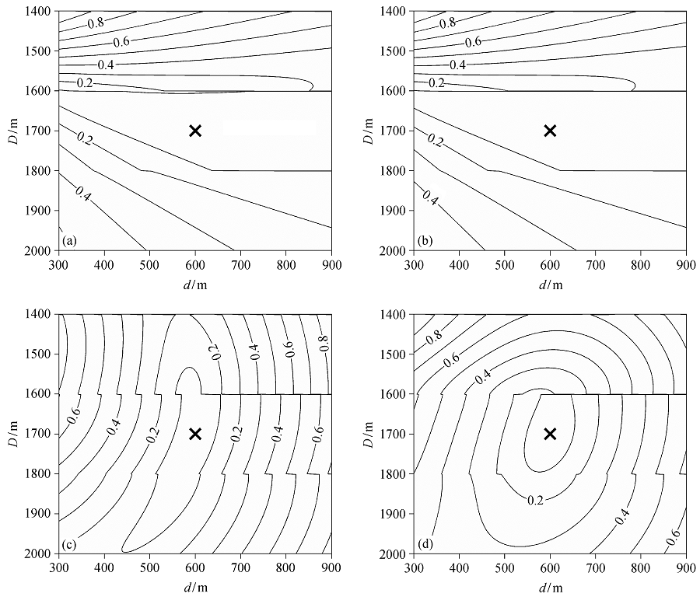
本试验采用的速度模型参数见表 2, 观测系统及震源位置等如图 9 所示, 网格搜索的参数与单层模型试验一致。图 10 为 4 种目标函数在不含初至拾取误差的条件下的震源定位结果。从图 10 可以看出, 目标函数等值线除在地层分界面处存在不连续的情况外, 在水平方向以及垂向上的收敛性与图4 基本上一致, 表明分层模型对目标函数收敛性的影响较小。
图9 多层模型介质及震源、观测系统布设示意图 Fig. 9 Multi-layer model and geometry of the source location and recording system
图10 目标函数等值线(多层模型结果) (a)~(d)分别为采用式(1)、(3)、(5)和(6)作为目标函数的等值线 Fig. 10 Contour plots of the objective functions (results of multi-layer model)
表2 地层模型参数
Table 2 Layer model parameters
在实际应用中, 用于震源定位的速度模型也会存在一定误差。为了模拟该模型误差, 我们对表 2中 P 波和 S 波速度值进行随机扰动(随机扰动的范围为-200~200 m/s), 得到100组含有误差的模型数据。利用扰动后的速度模型进行震源定位的结果如图 11 所示。对比图 11 与图 10 可知, 反演震源位置与目标函数等值线的分布规律仍然存在一定程度的相似性, 利用式(6)得到的震源定位结果误差最小。此外, 对比图11与图7可知, 震源定位结果对模型误差更加敏感。
图11 合成数据震源定位结果(a)~(d)分别为采用式(1)、(3)、(5)和(6)作为目标函数时的震源定位结果 Fig. 11 Source location results of the synthetic data set
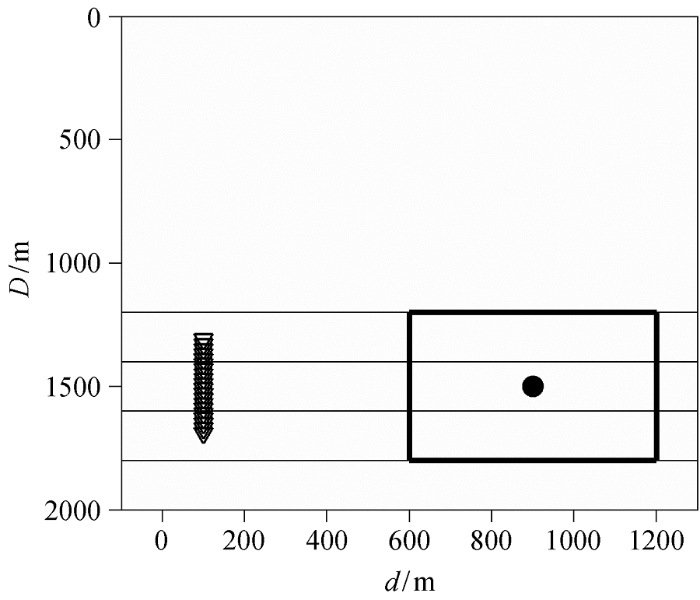
除初至拾取误差和模型误差外, 震源与观测系统之间的相对位置也是影响震源定位结果的因素之一。在图 9 所示模型介质和观测系统的基础上, 我们分别将震源位置向右移动 300 m 和向下移动 200 m, 同时调整搜索目标区域的范围(如图 12 和 13 所示), 其余参数保持不变, 进行重新定位后得到的结果分别如图 14 和 15 所示。将二者与图 10 进行比较可知, 震源位置的变化虽然能够改变目标函数等值线的分布形态, 但对目标函数的收敛性不会产生较大影响。
图12 震源右移后的多层模型介质及震源、观测系统布设示意图 Fig. 12 Multi-layer model and geometry of the source location and recording system with the source moved right
图13 震源下移后的多层模型介质及震源、观测系统布设示意图 Fig. 13 Multi-layer model and geometry of the source location and recording system with the source moved down
图14 震源右移后的目标函数等值线(多层模型结果) (a)~(d)分别为采用式(1)、(3)、(5)和(6)作为目标函数的等值线 Fig. 14 Contour plots of the objective functions with the source moved right (results of multi-layer model)
图15 震源下移后的目标函数等值线(多层模型结果) (a)~(d)分别为采用式(1)、(3)、(5)和(6)作为目标函数的等值线 Fig. 15 Contour plots of the objective functions with the source moved down (results of multi-layer model)
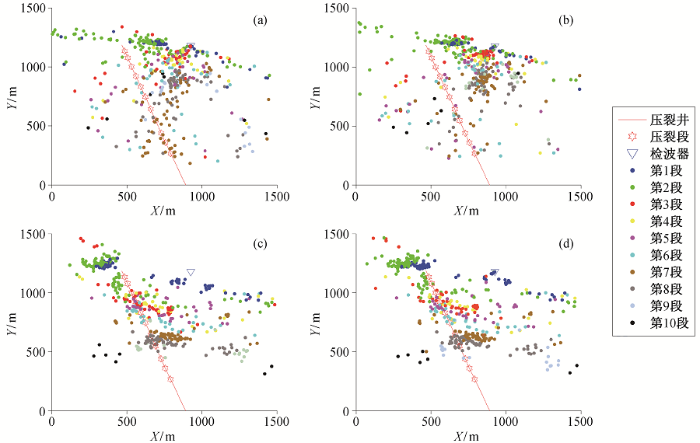
本文采用的实际资料为某油田对一口水平井进行的 11 段水力压裂施工的微地震监测数据。在采集该资料时使用的观测系统为一组 15 级的井下检波器串, 其级间距为 10 m, 时间采样间隔为 0.0005 s。实际监测时, 该观测系统布设在压裂井附近的一口直井中进行数据采集。
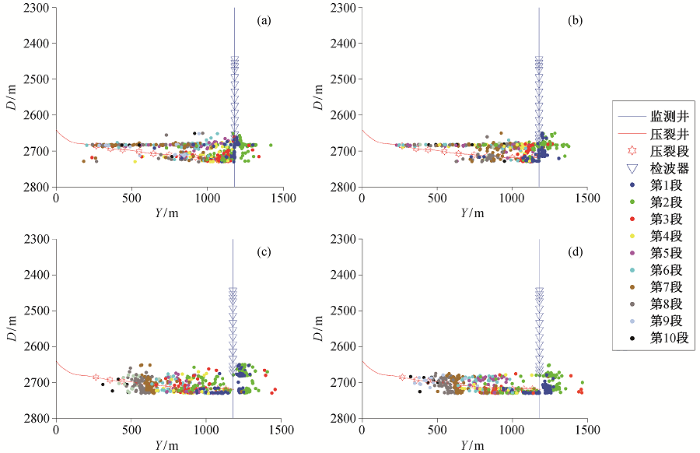
我们从该实际资料中共识别出 521 个有效微地震事件, 对这些微地震事件分别采用不同目标函数进行震源定位后的结果如图 16 和 17 所示。从图16 可以看出, 当采用式(1)和(3)作为目标函数时, 大部分反演得到的震源点均集中在观测井附近, 而其他远离观测井的震源点则杂乱无章地分布, 表明这两种目标函数对于震源距离的确定不够准确。相比较而言, 式(5)和(6)的震源定位结果基本上都位于各个压裂段附近, 并呈条带状分布于射孔点两侧, 可以有效地指示裂缝的大致形态。另外, 从图 17可知, 式(1)、(3)和(6)的震源定位结果绝大部分都集中在2680~2730 m的深度范围, 而式(5)的震源定位结果中仍有许多震源点分布在 2680 m 以上, 表明式(5)对震源深度的确定不是很理想。综合分析图 16 和 17 可知, 当采用式(6)作为目标函数时, 反演震源的分布最为合理, 且基本没有误差较大的震源点, 证明利用该式能够得到更加可靠的震源定位结果。
图16 实际资料震源定位结果俯视图(a)~(d)分别为采用式(1)、(3)、(5)和(6)作为目标函数时的震源定位结果 Fig. 16 Plan view of the source location results of the real data set
图17 实际资料震源定位结果侧视图(a)~(d)分别为采用式(1)、(3)、(5)和(6)作为目标函数时的震源定位结果 Fig. 17 Side view of the source location results of the real data set
本文研究了不同观测系统及目标函数对于微地震震源定位结果的影响。通过模型数据及实际资料处理, 可得到以下两条主要结论。
1) 单独使用地面或井下观测系统可能无法得到准确的震源位置, 而将地面与井下观测系统联合使用, 可以有效地提高震源定位精度。
2) 采用 P波或 S 波走时残差作为目标函数, 由于其在水平方向上的收敛性较差, 得到的震源定位结果在距离方面可能存在较大误差。采用 P 波和S 波的初至到时之差计算走时残差作为目标函数, 其震源定位结果在深度方面可能存在较大误差。相比较而言, 采用本文提出的走时残差计算方法可以有效地提高目标函数在水平方向及垂向上的收敛性, 从而得到更加准确的震源定位结果。
致谢 感谢中国石油化工集团公司石油工程地球物理有限公司胜利分公司于静主任和冯刚经理提供实际监测资料。
The authors have declared that no competing interests exist.
基于走时拟合的微震源定位及拾震器布阵研究 微地震监测定位精度分析 基于微地震监测的油井压裂裂缝成像算法研究[D] Accuracy of microseismic event locations recorded with single and distributed downhole sensor arrays 微地震定位方法研究 Uncer-tainties in passive seismic monitoring Microseismic location uncertainty Feasibility of jointly locating microseismic events with data from surface and downhole receivers 基于遗传算法的油井压裂微震震源点的定位技术研究[D] 微地震震源反演方法研究
水力压裂井间微地震震源定位方法研究[D] Microearthquake location: a nonlinear approach that makes use of a simplex stepping procedure Eaethquake location by 3-D finite-difference travel times
Feasibility of joint 1D velocity model and event location inversion by the neighbourhood algorithm Locating microseismic events using borehole data Comparison of surface and borehole locations of induced seismicity
/
, Yuyang TAN
1 观测系统对震源定位结果的影响研究
1.1 方法原理
观测方式 仪器要求 检测周期 检测范围 数据质量 可操作性 成本花费 井下观测 高 短期 小 好 复杂 高 地面观测 低 短期/长期 大 较差 简便 低 浅井观测 低 长期 大 较好 较简便 较低
1.2 模型试算
2 目标函数对震源定位结果的影响研究
2.1 基本原理
2.2 模型试算
层位 D/m vP /(m · s-1) vS/(m · s-1) 1 0~1200 2000 1200 2 1200~1400 2400 1500 3 1400~1600 2800 1800 4 1600~1800 3200 2100 5 1800~2000 3600 2400
2.3 实际资料处理
3 总结
参考文献
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]

〈
〉
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}