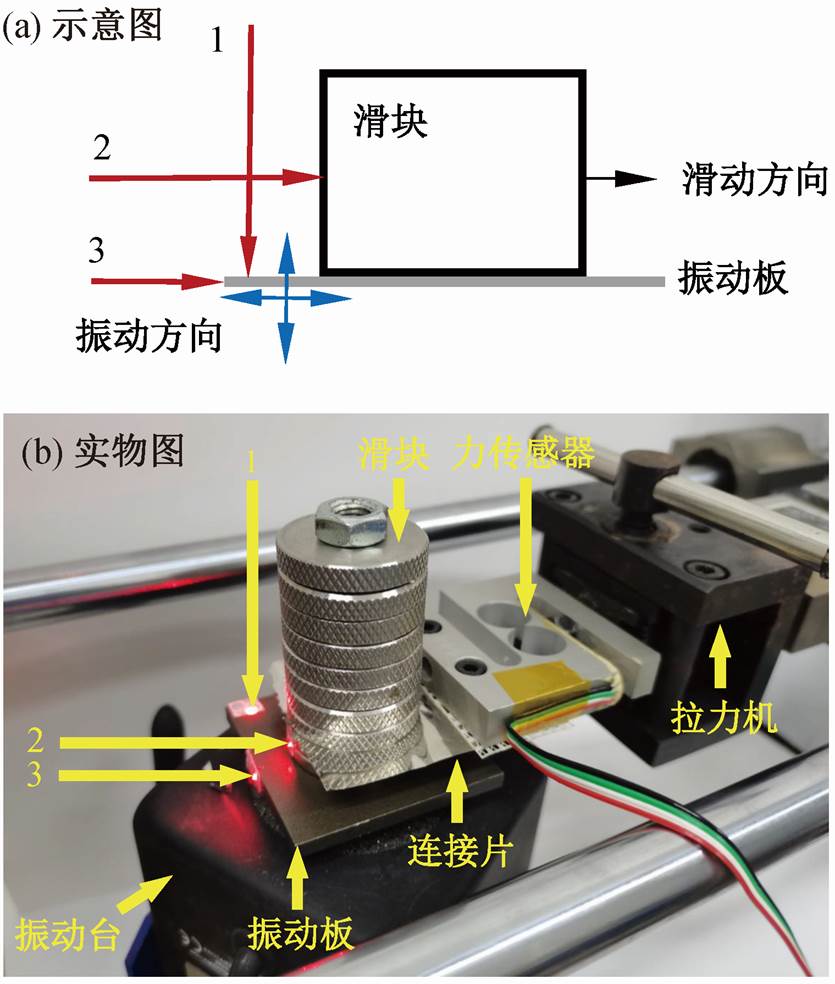
1, 2 和 3 分别为 3 台激光测振仪发射的激光照射在实验装置上的位置
图1 实验装置
Fig. 1 Experimental setup diagram
北京大学学报(自然科学版) 第61卷 第6期 2025年11月
Acta Scientiarum Naturalium Universitatis Pekinensis, Vol. 61, No. 6 (Nov. 2025)
doi: 10.13209/j.0479-8023.2025.081
摘要 以法向振动对摩擦的影响为出发点, 同时考虑振动板的法向和切向振动, 自主设计实验装置, 测量不同振动频率下摩擦力的变化, 并依据 Coulomb 摩擦定律构建动力学模型, 从宏观尺度分析频率影响摩擦的机理。结果表明, 仿真结果与实验结果基本上吻合, 在法向和切向振动同时存在, 且法向振幅和平均滑动速度不变的条件下, 振动频率越大, 单位时间内出现黏滞或摩擦力方向改变的时间总和更长, 导致界面上滑动摩擦力的降低更明显, 因此 Coulomb 摩擦定律能够解释低频振动条件下摩擦力降低的原因。
关键词 振动频率; 摩擦降低; 低频振动
16 世纪, 达芬奇在实验观察的基础上, 得出摩擦力与法向压力成正比的结论, 之后库伦在达芬奇研究的基础上将其发展成 Coulomb 摩擦定律[1]。由于摩擦的复杂性, Coulomb 摩擦定律无法解释所有的摩擦现象[2], 但是该定律在摩擦力与法向压力之间构建了简洁且有效的关系。因此, 基于 Coulomb摩擦定律构建的摩擦模型在处理宏观尺度干摩擦问题时有广泛的应用。比如, 基于 Coulomb 摩擦定律, Aranson 等[3]分析散体颗粒在传输过程中堵塞的原因, Yokoyama 等[4]分析螺栓松动的原因, 王晓军 等[5]对具有驱动约束及非光滑滑移铰进行建模。
随着相关研究的深入, 学者们发现, 当接触界面发生碰撞或者振动时, Coulomb 摩擦定律仍然可以解释一些摩擦动力学行为。比如, Zhao 等[6–7]应用 Coulomb 摩擦定律分析颗粒在发生碰撞时的切向运动。另外, 在机械系统中, 摩擦和振动经常相互作用, 有时摩擦会激起振动, 有时振动会影响摩擦。Coulomb 摩擦定律可用于解释摩擦激起振动的相关问题[8], 分析振动影响摩擦的机理。
振动可以降低界面上的摩擦[9–12], 当振动导致运动物体之间的相对速度方向改变或变为零, 即振动引起宏观尺度摩擦力方向改变或出现黏滞时, 振动可以起到降低摩擦的作用, 此现象可由 Coulomb摩擦定律解释[13–15]。综上所述, Coulomb 摩擦定律在科学研究和工程应用中发挥着重要作用, 并且可以用于分析振动界面上的摩擦动力学行为。
此外, 有学者发现振动频率与界面摩擦密切相关。在宏观尺度, Chow-dhury 等[16]在界面上引入法向振动, 测量结果显示, 随着振动频率增加, 摩擦力的降低越来越明显, 但 Chowdhury 未解释振动频率变化对摩擦的影响机理。在微观尺度, Yoo 等[17]研究 3 个方向振动对摩擦的影响, 包括法向振动、与滑动方向相同的切向振动和与滑动方向垂直的切向振动, 结果表明 3 个方向的振动频率对摩擦的影响相似, 随着振动频率的增加, 滑动摩擦系数越来越低。Capozza 等[18–20]通过分析构建的原子接触对模型, 发现如果切向驱动弹簧的振动频率大于某个特定值, 摩擦力可以减小到几乎为零的程度。可见, 振动频率影响着界面摩擦。但是, 关于振动频率与摩擦关系的研究较少, 特别是宏观尺度上振动频率与摩擦的关系有待进一步研究。
法向振动台在产生法向振动激励过程中, 不可避免地会伴随一定程度的切向振动; 切向振动台在发生切向振动时, 也会产生一定幅度的法向振动分量[21]。此现象来源于振动台的设计, 振动台的激振柱或杆与其周边结构之间必须留有一定的空隙, 否则激振柱或杆会被卡死。也正是这类空隙的存在, 导致振动过程中法向振动和切向振动常常同时存在。但是, 已有的宏观尺度研究只关注单一方向的振动对摩擦的影响, 未研究法向和切向振动同时存在时振动频率对摩擦的影响。另外, 在有关摩擦的实验中, 切向牵引力与被牵引物体之间往往不是完全的刚性连接, 而是弹性连接(称为连接弹性), 连接弹性会影响运动物体之间的切向相对速度。因此, 在研究振动界面上的摩擦力时, 既要考虑振动台的切向振动, 也要考虑连接弹性。
本文以法向振动对摩擦的影响为出发点, 并考虑与法向振动同时存在的切向振动, 在 0~100Hz 范围内, 在宏观尺度开展振动频率变化引起滑动摩擦力变化的实验研究。依据 Coulomb 摩擦定律构建动力学模型, 分析摩擦力变化的机理并验证 Coulomb摩擦定律的有效性。
本文自主设计的实验装置如图 1 所示。一个圆柱形滑块在金属连接片的拉动下, 在振动板上沿水平方向滑动, 金属连接片的另一端与力传感器相连, 力传感器与拉力机固定在一起, 拉力机以恒定的速度拉动滑块水平滑动。虽然在滑动方向上滑块的瞬时滑动速度不能保持恒定, 但是滑块的平均滑动速度与拉动速度一致, 因此滑块与振动板之间的平均滑动摩擦力与力传感器测得的拉力相等。在滑块滑动的同时, 振动台提供正弦振动。
滑块、振动板和金属连接片材质均为钢材。滑块的直径为 30mm, 高度为 46mm。振动板的长和宽均为 55mm, 厚度为 3mm。金属连接片的长和宽均为 35mm, 厚度为 25.5um, 连接片很薄, 在法向上的刚度可以忽略, 不影响滑块的法向运动, 连接片具有一定的弹性, 可作为拉力传感器与滑块之间的连接弹性。
主要仪器包括振动信号发生器、振动台、激光测振仪、采集卡、拉力传感器和拉力机。振动信号发生器用于产生不同频率和振幅的正弦激励信号, 振动台接收到激励信号后, 驱动振动板振动。3 台激光测振仪分别测量滑块和振动板运动的绝对速度, 测振仪 1 测量振动板的法向振动速度, 测振仪 2测量滑块在滑动方向上的滑动速度, 测振仪 3 测量振动板在滑动方向上的切向振动速度。采集卡用于收集激光测振仪测得的信号, 拉力机用于拉动滑块, 拉力传感器用于测量拉力。
1, 2 和 3 分别为 3 台激光测振仪发射的激光照射在实验装置上的位置
图1 实验装置
Fig. 1 Experimental setup diagram
首先, 设定一组正弦法向振动的激励电压和频率, 将信号输入振动台, 振动台驱动振动板振动。振动板的法向振幅与激励电压有关, 在频率不变情况下, 电压越高, 振幅越大。需要说明的是, 由于振动台功率的限制, 在输入电压值不变的条件下, 当改变振动频率时, 振动台实际产生的法向振幅也会改变, 即频率增加时, 振幅会降低, 反之亦然。为尽可能避免法向振幅对摩擦力的影响, 在改变激励频率的同时, 也调整激励电压, 保证振动板的实际法向振幅与预设的振幅相比, 变化范围在±10%以内。然后, 拉力机通过力传感器和金属弹片拉动滑块开始滑动, 并测量滑块与振动板之间的摩擦力, 同时 3 台激光测振仪测量振动板的法向和切向振动速度以及滑块在滑动方向上的滑动速度。最后, 改变振幅和频率, 重复上述的操作, 测量不同振动参数下的摩擦力。实验中, 实验室的温度为 26°C 左右, 相对湿度为 36%左右。
振动板的法向振幅可由测得法向振动速度求得, 由于振动信号是正弦信号, 所以振动板的法向振动速度为
 , (1)
, (1)
其中, vn 为振动板法向振动速度, An 为振动板法向振幅, ωn 为法向振动角频率, α 为法向振动初始相位角。根据测振仪 1 测得的结果, 可以计算出法向振动速度幅值的平均值 , 然后由
, 然后由
 求得振动板的法向振幅。将测振仪 2 和 3 测得的速度绘制到同一张图, 判断两条速度曲线是否交叉和重合, 曲线交叉表示宏观尺度的相对速度发生方向改变, 即摩擦力方向改变; 曲线重合代表宏观尺度的相对速度为零, 即发生黏滞。
求得振动板的法向振幅。将测振仪 2 和 3 测得的速度绘制到同一张图, 判断两条速度曲线是否交叉和重合, 曲线交叉表示宏观尺度的相对速度发生方向改变, 即摩擦力方向改变; 曲线重合代表宏观尺度的相对速度为零, 即发生黏滞。
首先, 保持拉动速度 vt=2mm/s 不变, 分别测量4 个法向振幅条件下不同频率时的滑动摩擦力, 并计算平均滑动摩擦力变化的比值, 即振动时滑动摩擦力的平均值 FL与无振时滑动摩擦力的平均值F0 的比值 FL/F0。该比值为无量纲的平均滑动摩擦力, 可清晰地反映平均滑动摩擦力减小的程度, 比值越小, 说明摩擦降低效果越明显。图 2 示意同一振幅条件下的结果, 可见随着振动频率的增加, 摩擦力逐渐减小。
以 f=100Hz 时的 4 个实验点为例, 测量图 2 所示实验的滑块滑动速度与振动板切向速度, 结果如图 3 所示, 4 个实验点的滑块滑动速度 与振动板切向振动速度
与振动板切向振动速度 都出现重合, 说明二者在滑动方向上出现宏观尺度的黏滞, 与前期研究结论一致, 即当振动引起滑块与振动板之间出现宏观尺度的黏滞或摩擦力方向改变时, 界面摩擦力会降低[13–15]。
都出现重合, 说明二者在滑动方向上出现宏观尺度的黏滞, 与前期研究结论一致, 即当振动引起滑块与振动板之间出现宏观尺度的黏滞或摩擦力方向改变时, 界面摩擦力会降低[13–15]。
保持法向振幅 An=0.019mm 不变, 在 4 个拉动速度下, 分别测量不同频率时滑动摩擦力的变化, 结果见图 4。对比相同拉动速度条件下的结果可以发现, 随着振动频率增加, 摩擦力逐渐减小。
以 50Hz 时 4 个实验点为例, 测量图 4 所示实验的滑块与振动板的切向速度, 结果见图 5。可以发现, 滑块与振动板的切向速度出现重合, 二者之间的摩擦力在滑动方向上出现宏观尺度的黏滞。
实验结果表明, 在法向和切向振动同时存在条件下, 当振动和连接弹性导致滑块和振动板在滑动方向上出现宏观尺度的黏滞和摩擦方向改变时, 摩擦力降低, 且在法向振幅和平均滑动速度不变条件下, 振动频率越高, 摩擦力越小。
对实验中的滑块进行受力分析, 结果见图 6。
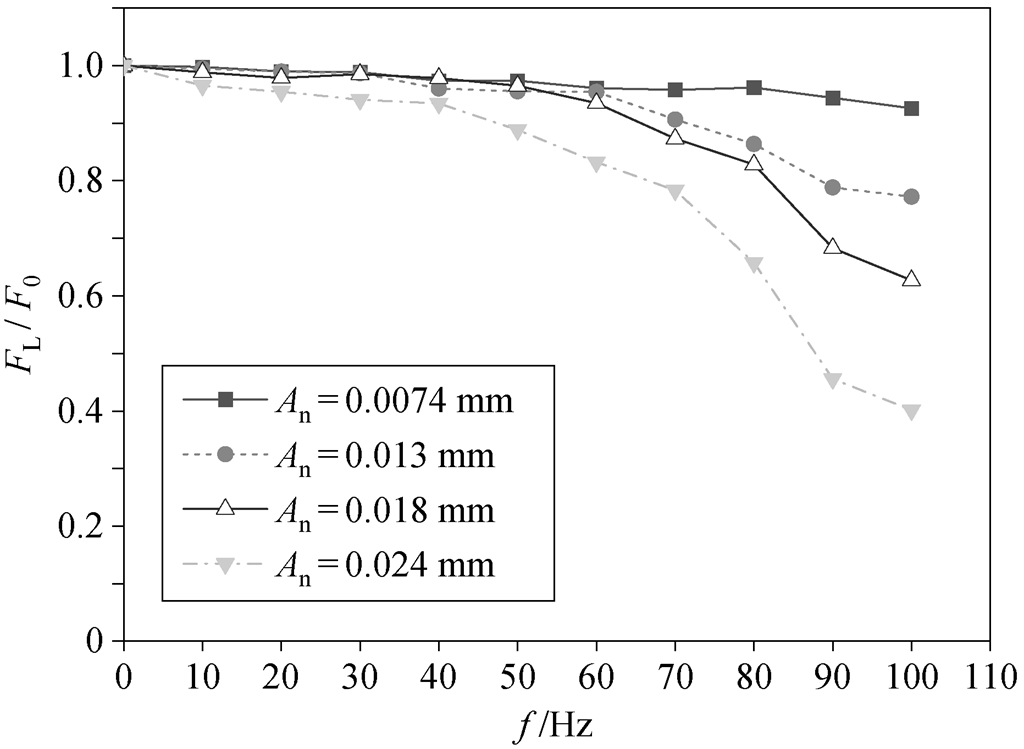
图2 平均滑动摩擦力变化比值 FL/F0与频率的关系(vt=2mm/s)
Fig. 2 Relationship between change ratio of average sliding friction force FL/F0 and frequency (vt=2mm/s)
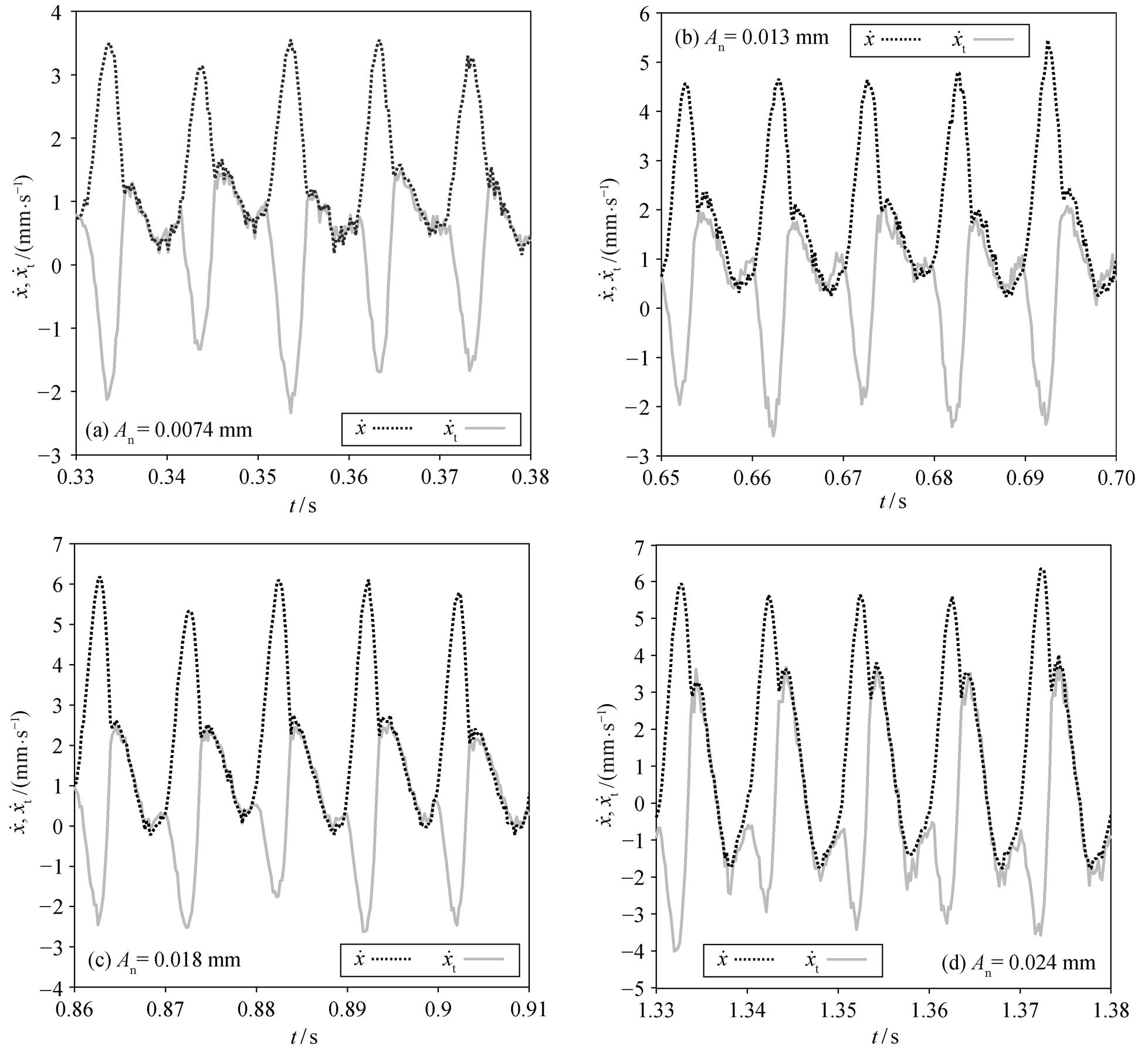
图3 滑块的滑动速度与振动板的切向振动速度的关系(vt=2mm/s, f=100Hz)
Fig. 3 Experimental results of the sliding speed of slider and the tangential vibration velocity of vibration plate (vt=2mm/s, f=100Hz)
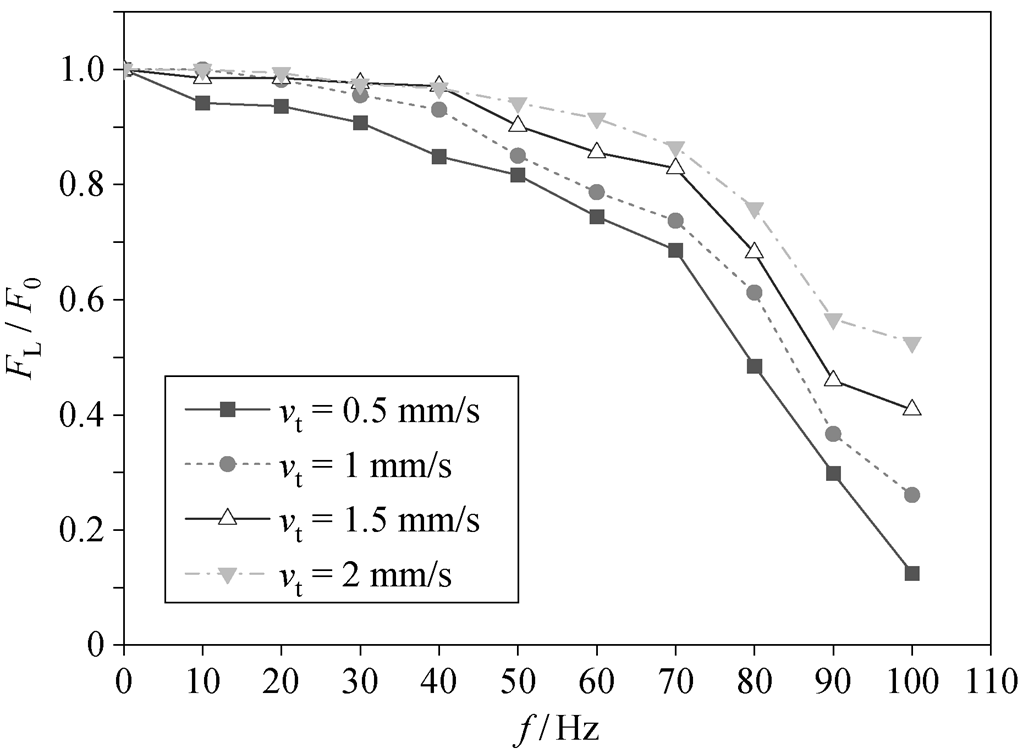
图4 平均滑动摩擦力变化比值 FL/F0与频率的关系(An =0.019mm)
Fig. 4 Relationship between change ratio of average sliding friction force FL/F0 and frequency (An =0.019mm)
根据牛顿第二定律, 滑块在法向的动力学方程为
 (2)
(2)
其中, 滑块的法向位移 振动板在法向上产生正弦振动, 且滑块与振动板在法向上始终不发生脱离, 滑块在切向的动力学方程为
振动板在法向上产生正弦振动, 且滑块与振动板在法向上始终不发生脱离, 滑块在切向的动力学方程为
 , (3)
, (3)
其中, x 为滑块在滑动方向上的位移。在求解 Fx 过程中, 滑块与振动板在滑动方向上的相对速度 vr 由下式求得:
 , (4)
, (4)
其中, At 为振动板的切向振幅; wt 为振动板的切向振动角频率; 切向振动由法向振动引起, 且实验测得wt = wn; b为振动板切向振动的初始相位。
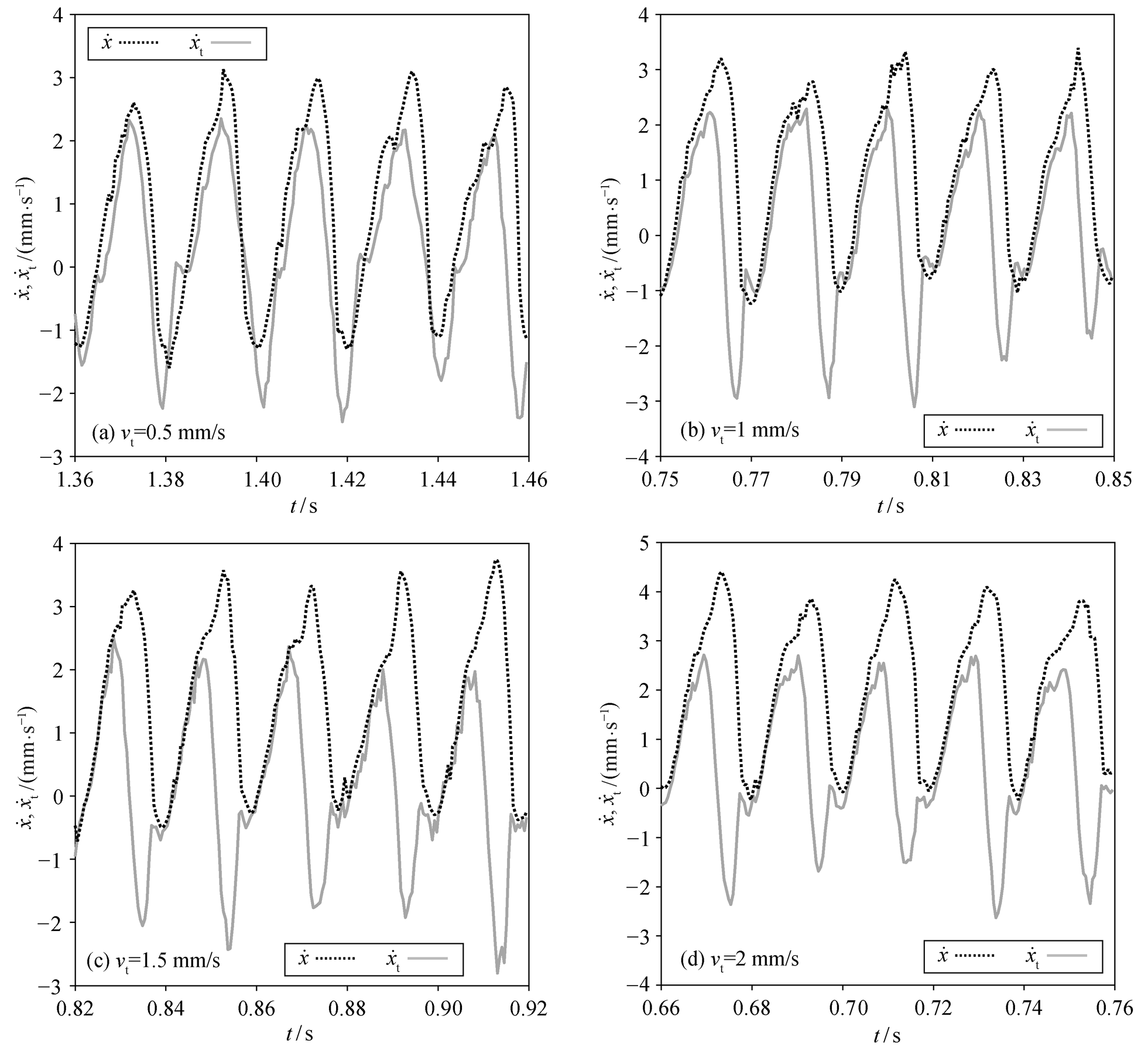
图5 滑块的滑动速度与振动板的切向振动速度的实验结果(An = 0.019mm, f=50Hz)
Fig. 5 Experimental results of the sliding speed of slider and the tangential vibration velocity of vibration plate (An = 0.019 mm, f=50 Hz)
式(3)中的 Fd 可由下式求得:
 , (5)
, (5)
其中, k 为滑块与拉力传感器之间连接弹片的刚度, 代表拉力传感器与滑块之间的连接弹性; c 为连接弹片的黏性系数。本模型中忽略连接片的切向黏性, c值始终为 0。
依据构建的动力学模型进行仿真, 所需参数均由实验测得。其中, k=3439, m=0.25kg, 滑块与振动板的动摩擦系数与静摩擦系数相同, μs=0.19, 其余参数 An, At, f 和 vt 实测值也代入动力学方程。
以图 2 中 An=0.013mm 和 An=0.024mm 以及图 4中 vt=1mm/s 和 vt=2mm/s 的实验结果为对象进行仿真, 仿真结果与实验结果的对比见图 7, 可见二者基本吻合, 因此本文构建的动力学模型能够反映低频振动界面上的摩擦动力学规律。
根据 Coulomb 摩擦定律, 滑块摩擦力的平均值可由下式计算:
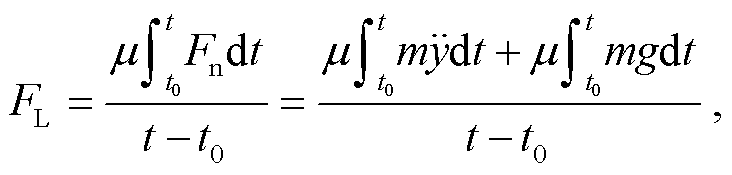 (6)
(6)
其中, t0 为滑块开始滑动的时刻; t为滑块结束的时刻, 且 ; T为一个振动周期, 0≤ Δt<T; 式(6)中
; T为一个振动周期, 0≤ Δt<T; 式(6)中
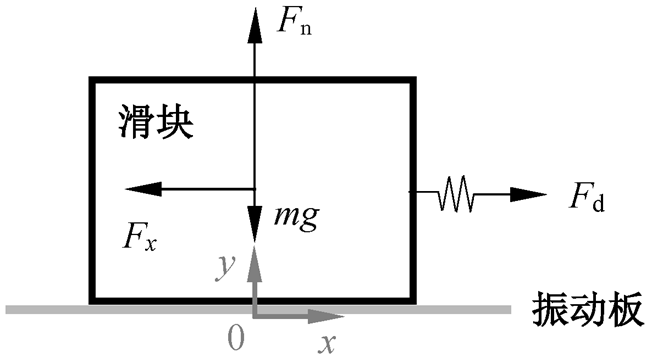
m 为滑块的质量, Fx为滑块与振动板之间的瞬时滑动摩擦力, Fn为振动板对滑块的法向支持力, Fd为拉力机对滑块的水平拉力
图6 滑块的受力分析示意图
Fig. 6 Force analysis diagram of slider
 (7)
(7)
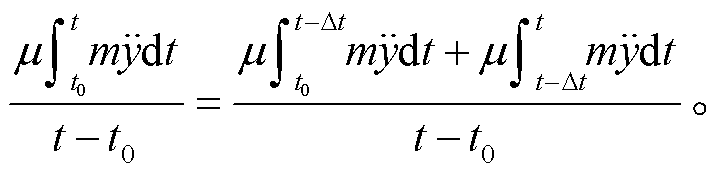
由于滑块在法向上始终在平衡位置附近振动, 所以 。又因当时间区间[t, t0]足够长时,
。又因当时间区间[t, t0]足够长时,  , 因此, 式(6)可简化为
, 因此, 式(6)可简化为
 。 (8)
。 (8)
由式(8)可知, 在 0~100Hz 条件下, 当振动和连接弹性未引起振动板与滑块在滑动方向上出现相对速度的方向改变或为零时, 滑块在振动板上始终保持连续滑动, 摩擦力不会明显降低。当振动和连接弹性引起振动板与滑块在滑动方向上出现相对速度的方向改变或出现黏滞时, 才会导致界面上的摩擦力明显降低[13–15]。
为了分析振动频率变化对摩擦的影响, 对图 7 (a)中 50Hz 和 100Hz 时滑动方向上的相对速度进行仿真, 结果如图 8所示。对图 7(b)中 50Hz 和 100Hz时滑动方向上的相对速度进行仿真, 结果见图 9。在图 8 和 9 中, 滑块与振动板的切向相对速度均出现黏滞, 在图 9(b)中, 不仅存在黏滞, 切向相对速度方向也发生改变, 并且黏滞或摩擦方向改变的频率与振动频率一致, 此仿真结果与图 3 和 5 的对应实验结果吻合。分别对比图 8 和 9 中的(a)与(b)、(c)与(d), 可以看出, 当平均滑动速度和振幅不变时, 频率越高, 引起黏滞或摩擦力方向改变的频率越高, 每个振动周期内出现黏滞或摩擦方向改变的时间跨度也越长。
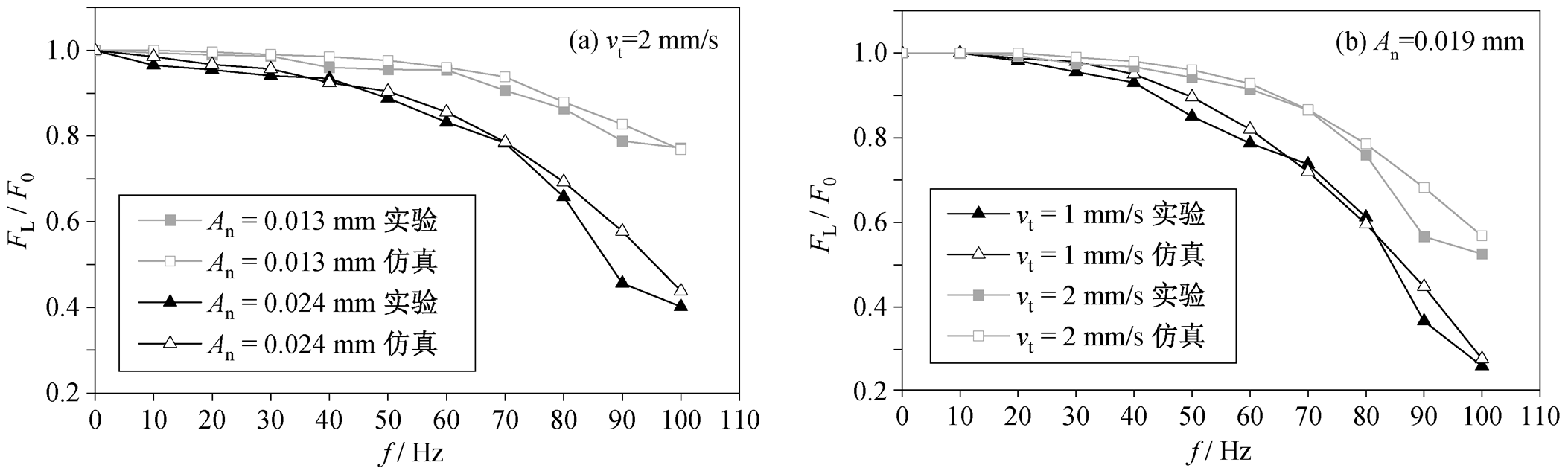
图7 平均滑动摩擦力变化比值 FL/F0 的实验与仿真结果对比
Fig. 7 Experimental and simulation results comparison of the change ratio of average sliding friction force FL/F0
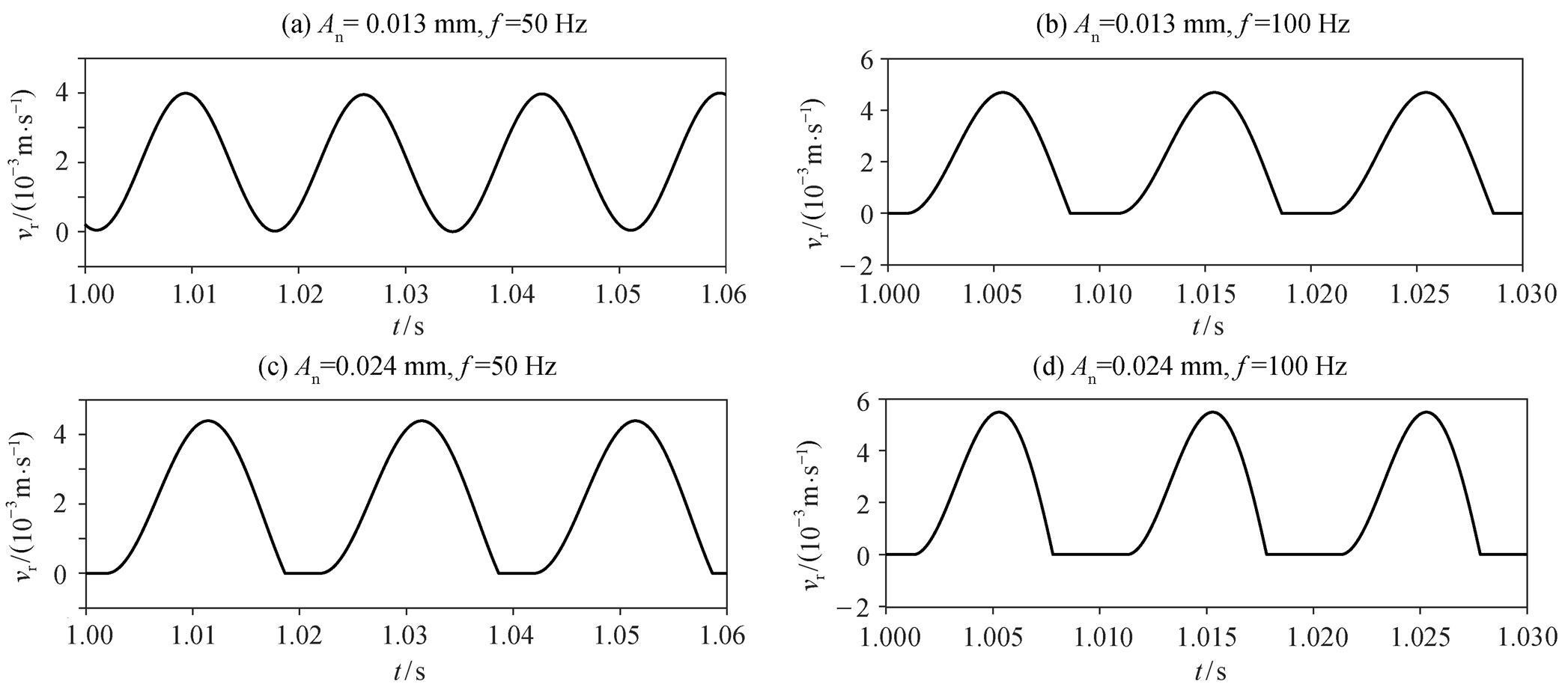
图8 滑块与振动板在滑动方向上的相对速度 vr 的仿真结果(vt=2mm/s)
Fig. 8 Simulation results of the relative velocity between slider and vibration plate in the sliding direction (vt=2mm/s)
针对图 2 和 4 中所有实验, 计算单位时间 1s 内滑块与振动板之间出现黏滞状态时间的总和 ta, 并与摩擦力的实验结果建立联系, 如图 10 所示。可以看出, 当 An 和 vt 不变时, 随着振动频率增加, 在 1s内出现黏滞的时间总和逐渐增加, 对应的摩擦力逐渐减低。原因在于随着黏滞时间总和的增加, 通过式(8)求出的平均滑动摩擦力降低, 导致摩擦降低效果更明显。需要说明的是, 图 10(b)中, 当f=100Hz, vt=0.5mm/s 和 vt=1mm/s 时, 相对速度不仅出现黏滞, 也出现方向的改变; 当 vt=1mm/s 时, 1s 内摩擦力方向改变的时长总和为 0.1s; 当 vt=0.5mm/s 时, 1s 内摩擦力方向改变的时长总和为 0.22s。正是在黏滞和摩擦力方向改变的共同作用下, 导致上述两个条件下测得的摩擦力更低。
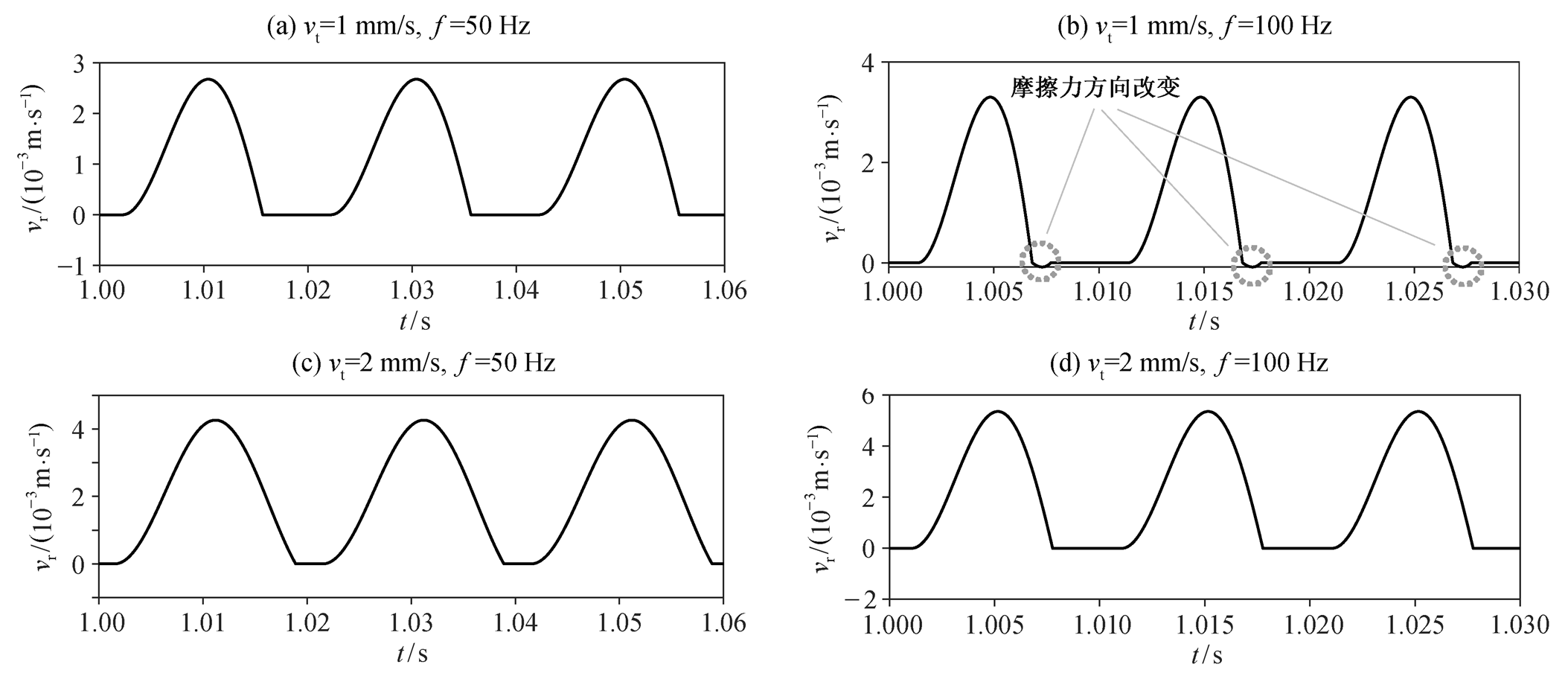
图9 滑块与振动板在滑动方向上的相对速度 vr 的仿真结果(An=0.019mm)
Fig. 9 Simulation results of the relative velocity between slider and vibration plate in the sliding direction vr (An=0.019 mm)
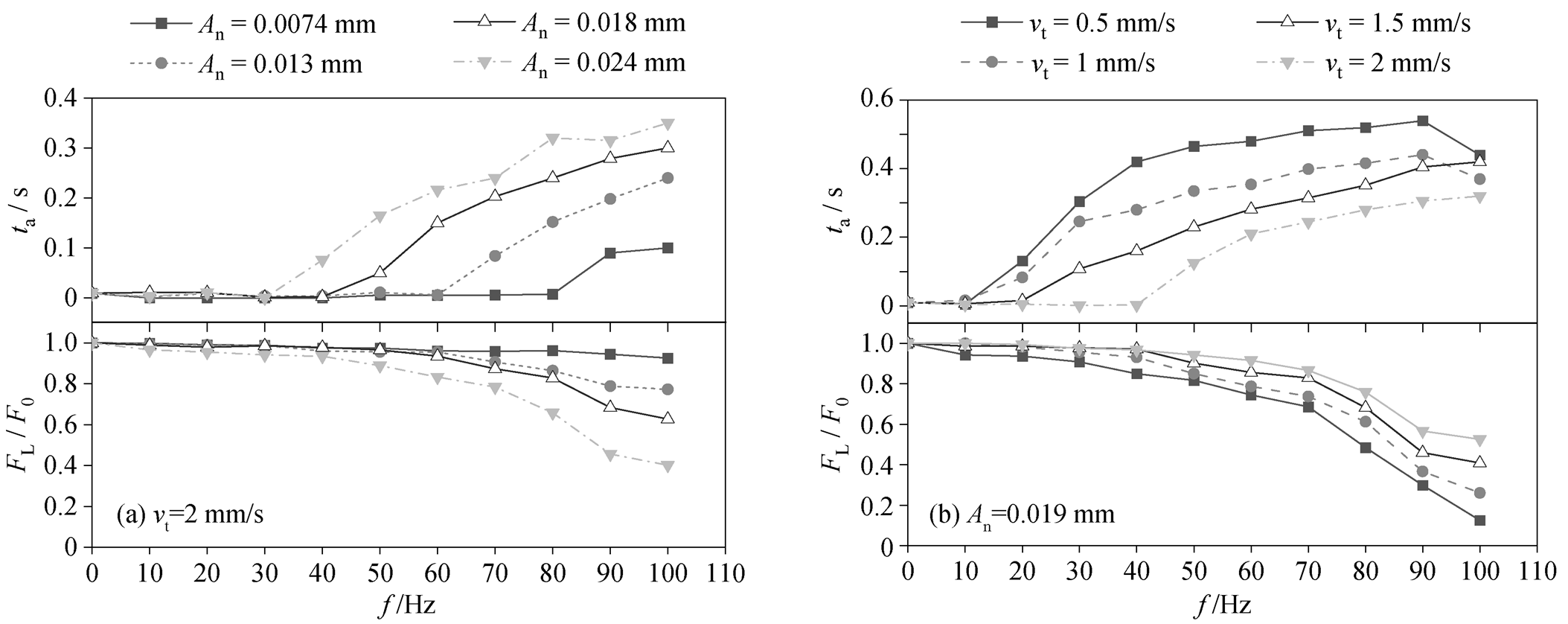
图10 黏滞状态时间总和以及平均滑动摩擦力变化比值 FL/F0 的实验结果
Fig. 10 Viscous state time sum and experimental results of change ratio of average sliding friction force FL/F0
综合上述仿真分析可知, 当平均滑动速度和法向振幅不变时, 在相同时段内, 振动频率越高, 在滑动方向上出现黏滞和摩擦力方向改变的时间总和越长, 导致平均滑动摩擦力的降低越明显。
本研究通过自主设计实验装置, 同时考虑振动板的法向和切向振动, 测得 0~100Hz 条件下振动频率变化对摩擦影响的实验数据。基于 Coulomb 摩擦定律, 构建能同时反映法向和切向振动对摩擦影响的动力学模型并进行仿真, 仿真结果与实验结果基本上一致。
本文研究结果阐释了 Coulomb 摩擦定律能够解释在低频振动界面上摩擦力降低的机理, 也明确了在法向振幅和平均滑动速度不变的条件下, 振动频率变化影响摩擦的原因。随着振动频率增加, 在单位时间内黏滞或摩擦力方向改变的频率增加, 发生黏滞和摩擦方向改变的时长总和也增加, 导致摩擦降低效果越明显。
参考文献
[1] Kunze M. Non-smooth dynamical systems. Berlin: Springer Science & Business Media, 2000
[2] 刘丽兰, 刘宏昭, 吴子英, 等. 机械系统中摩擦模型的研究进展. 力学进展, 2008, 38(2): 200–213
[3] Aranson I S, Tsimring L S, Malloggi F, et al. Nonlocal rheological properties of granular flows near a jam-ming limit. Physical Review E, 2008, 78(3): 031303
[4] Yokoyama T, Izumi S, Sakai S. Analytical modelling of the mechanical behavior of bolted joint subjected to transverse loading. Journal of Solid Mechanics and Materials Engineering, 2010, 4(9): 1427–1443
[5] 王晓军, 王琪, 庄方方. 含摩擦滑移铰及驱动约束多刚体系统数值算法. 动力学与控制学报, 2014, 12 (4): 335–340
[6] Zhao Z, Liu C. The analysis and simulation for three-dimensional impact with friction. Multibody System Dynamics, 2007, 18(4): 511–530
[7] Zhao Z, Liu C, Chen B. The numerical method for three-dimensional impact with friction of multi-rigid-body system. Science in China Series G, 2006, 49(1): 102–118
[8] Li Z, Han N, Yang T. Friction-induced vibrations of a two DOF self-excited SD oscillator. Journal of Vibra-tion Engineering & Technologies, 2024, 12: 601–618
[9] Storck H, Littmann W, Wallaschek J, et al. The effect of friction reduction in presence of ultrasonic vibra-tions and its relevance to travelling wave ultrasonic motors. Ultrasonics, 2002, 40: 379–383
[10] Kapelke S, Seemann W. On the effect of longitudinal vibrations on dry friction: Modelling aspects and ex-perimental investigations. Tribology Letters, 2018, 66: 79
[11] Teidelt E, Starcevic J, Popov V L. Influence of ultra-sonic oscillation on static and sliding friction. Tribo-logy Letters, 2012, 48: 51–62
[12] Popov V L, Starcevic J, Filippov A E. Influence of ultrasonic in-plane oscillations on static and sliding friction and intrinsic length scale of dry friction pro-cesses. Tribology Letters, 2010, 39: 25–30
[13] Littmann W, Storck H, Wallaschek J. Sliding friction in the presence of ultrasonic oscillations: superposition of longitudinal oscillations. Archive of Applied Me-chanics, 2001, 71: 549–554
[14] Gutowski P, Leus M. The effect of longitudinal tan-gential vibrations on friction and driving forces in sliding motion. Tribology International, 2012, 55: 108–118
[15] 鲁建东, 赵振. 振动引起的界面切向相对运动对摩擦的影响. 北京大学学报(自然科学版), 2020, 56 (5): 777–784
[16] Chowdhury M A, Helali M M. The effect of frequency of vibration and humidity on the wear rate. Wear, 2007, 262: 198–203
[17] Yoo S S, Kim D E. Effects of vibration frequency and amplitude on friction reduction and wear characteris-tics of silicon. Tribology International, 2016, 94: 198–206
[18] Capozza R, Barel I, Urbakh M. Probing and tuning frictional aging at the nanoscale. Scientific Reports, 2013, 3: 1896
[19] Capozza R, Rubinstein S M, Barel I, et al. Stabilizing stick-slip friction. Physical Review Letters, 2011, 107 (2): 024301
[20] Capozza R, Vanossi A, Vezzani A, et al. Suppression of friction by mechanical vibrations. Physical Review Letters, 2009, 103(8): 085502
[21] 樊雪松, 苏文, 王晓耕. 电动振动台水平滑台正交方向响应分析及加强台面的设计. 航天器环境工程, 2006, 32(2): 90–93
Effect of Frequency on Interfacial Friction at Low-Frequency Vibration
Abstract From the perspective of the influence of normal vibration on friction, considering both normal and tangential vibrations of the vibrating plate, an experimental setup was designed independently to measure the friction at different vibration frequencies. Based on Coulomb’s friction law, a macroscopic dynamic model was established to analyze the mechanism of friction reduction affected by vibration frequencies. The results indicate that the simulation results are generally consistent with the experimental results. When the normal amplitude and average sliding velocity are constant in the presence of both normal and tangential vibration, the greater the vibration frequency, the longer the total time of sticks or the changes of friction direction per unit time will be. Consequently, this leads to more significant friction reduction at the interface and shows that Coulomb's friction law can explain the reason for friction reduction under low-frequency vibration conditions.
Key words vibration frequency; friction reduction; low-frequency vibration
国家自然科学基金(12372038)资助
收稿日期: 2024–10–29;
修回日期: 2025–05–07