图1 本文采用的作物幼苗分布信息提取方法流程
Fig. 1 Flow chart of crop seedling mapping adopted in this study
北京大学学报(自然科学版) 第59卷 第5期 2023年9月
Acta Scientiarum Naturalium Universitatis Pekinensis, Vol. 59, No. 5 (Sept. 2023)
国家自然科学基金(42071307)资助
doi: 10.13209/j.0479-8023.2023.064
收稿日期: 2022‒11‒02;
修回日期: 2023‒01‒18
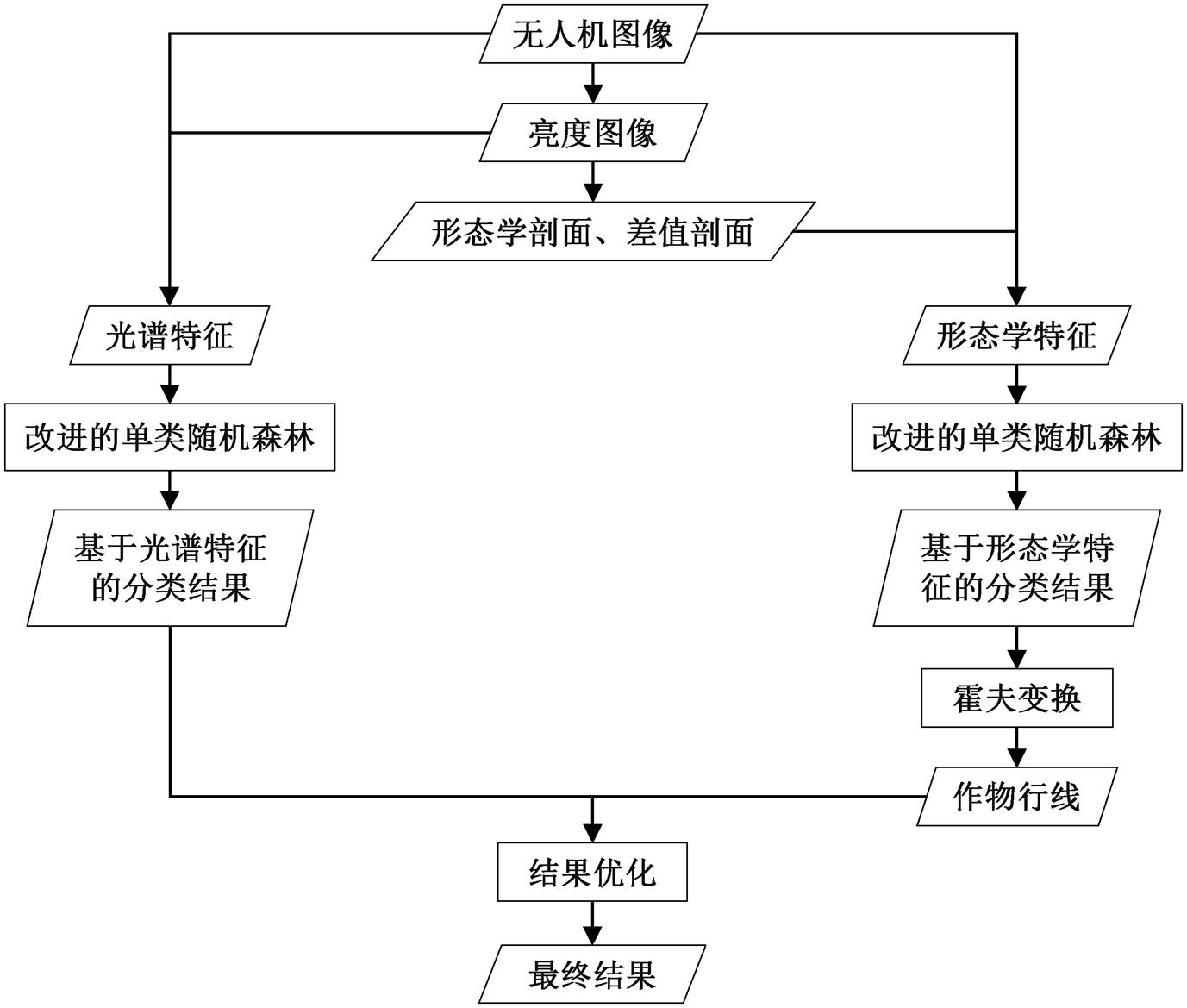
摘要 提出一种利用光谱特征、形态学特征和霍夫变换的无人机图像玉米幼苗分布信息提取方法。首先, 从无人机图像中提取光谱特征和形态学特征, 利用改进的单类随机森林算法, 分别得到基于光谱特征和基于形态学特征的玉米幼苗图像分类结果。然后, 利用霍夫变换方法, 从基于形态学特征的玉米幼苗图像分类结果中提取玉米幼苗行线。最后, 利用得到的玉米幼苗行线, 优化基于光谱特征的玉米幼苗图像分类结果, 得到最终的幼苗分布信息提取结果。两个研究区提取结果的对比表明, 所提方法有效地结合了形态学特征与霍夫变换的特点, 与现有方法相比, 可以得到更好的玉米幼苗分布信息提取结果。
关键词 无人机遥感图像; 幼苗分布信息提取; 形态学特征; 霍夫变换
及时、准确地掌握和监测作物幼苗的相关信息(如幼苗的空间分布、分布面积和出苗率), 对作物的田间管理、产量预测以及作物生长发育过程的定量描述和预测具有重要的应用价值[1]。
无人机遥感技术具有低成本、低损耗、可重复使用以及风险小等诸多优势, 在农业生产的很多方面得到广泛应用[2−3]。在利用无人机遥感技术提取作物幼苗分布信息方面, 国内外学者进行了研究。例如, 利用无人机图像、回归分析模型和图像分析技术进行苗情诊断, 并计算出苗率[4−5]; 利用可见光波段的植被指数分析油菜目标数量与形态特征的相关性, 从低空无人机遥感图像中识别油菜的出苗株数[6]; 利用深度学习技术, 实现甜菜和树种幼苗的全自动计数[7−8]; 分别利用角检测模型、线性回归模型和深度学习模型, 估算玉米幼苗的数量。这些研究都较为准确地得到玉米幼苗信息, 其中深度学习模型对玉米幼苗的识别误差最小[9]。
目前, 利用遥感技术提取作物幼苗的株数和出苗率等生长信息已成为研究的热点, 而对作物幼苗的提取是进行这些研究的基础和关键。因此, 研究复杂场景中作物幼苗的提取具有重要意义。作物幼苗的光谱特征与周围其他植被相似, 因此可利用其他特征进行作物幼苗的提取。形态学特征是一种表征空间信息的结构特征, 在建筑物和道路提取、地物分类和图像分割等方面得到广泛应用[10−15]。相关研究中, 利用线性变换(如霍夫变换)提取的作物行线被用于优化作物幼苗的分类结果, 取得不错的效果[16−20]。
本文提出一种基于无人机图像的作物幼苗分布信息提取方法, 以玉米幼苗为研究对象, 综合利用光谱特征、形态学特征以及通过霍夫变换得到的作物行线来提取玉米幼苗。
本文综合利用无人机图像的光谱特征和形态学特征, 通过图像分类得到初步的作物幼苗分布信息; 利用霍夫变换提取作物幼苗的行线, 进一步改进作物幼苗分布信息的提取结果。如图 1 所示, 本文提出的方法包括以下几个主要步骤: 1)计算无人机图像的亮度图像和形态学特征; 2)利用光谱特征, 得到初步的幼苗分类结果; 3)利用基于形态学特征的幼苗分类结果进行霍夫变换, 提取作物幼苗行线; 4)利用得到的作物幼苗行线, 改进作物幼苗的初步分类结果, 最终得到幼苗分布信息的提取结果。
本研究采用低空无人机获取的包括红(R)、绿(G)、蓝(B) 3 个波段的可见光图像, 通过颜色变换获得亮度图像。亮度图像指颜色模型 HSL (色相Hue、饱和度 Saturation 和亮度 Lightness)中的 L 变量[21]。从 RGB 模型变换到 HSL 模型, L 变量的转换公式为
L=(max(R, G, B)+min(R, G, B))/2。
本研究一方面将亮度图像与原图像结合, 作为光谱特征; 另一方面将亮度图像作为计算形态学特征的输入图像。
为了突出作物幼苗信息, 降低其他类别地物对幼苗提取结果的影响, 本文利用亮度图像计算形态学特征[22−23]。
图1 本文采用的作物幼苗分布信息提取方法流程
Fig. 1 Flow chart of crop seedling mapping adopted in this study
无人机图像仅包括可见光波段, 作物幼苗的光谱特征与其他植被相似, 因此仅利用光谱特征难以准确地区分作物幼苗与其他植被。但是, 在结构和几何特征(如尺寸和形状)方面, 幼苗与其他植被有较明显的差异, 因此加入形态学特征(morphological features)这一空间特征来区分幼苗与其他植被。
本文采用的形态学特征包括形态学剖面(mor-phological profiles, MP)和形态学差值剖面(deriva-tive morphological profiles, DMP)[13], 可以表达大小不同的地物类别结构信息。形态学剖面是利用大小不同的结构元素对图像进行形态学开运算重建和闭运算重建, 分别得到一系列尺度下的开运算剖面和闭运算剖面, 这些剖面的特征能反映像元灰度值随不同尺度的开运算和闭运算重建后的变化。形态学差值剖面代表相邻尺度下形态学剖面之间的差值。
本文采用一种单类分类方法(one-class classifi-cation), 即改进的单类随机森林算法[10], 得到初步的作物幼苗的图像分类结果。单类分类方法是二类分类方法的特例, 只用目标类(即正类)进行训练, 适用于较少或者没有非目标类(负类)先验信息的情况[24−25]。
改进的单类随机森林算法是单类随机森林(one- class random forest)算法的优化版本。随机森林是一种基于统计学习理论的分类方法, 它利用重采样方法, 从原始样本中抽选更多的样本, 建立很多决策树分类模型, 根据多棵决策树分类结果, 得出最终的分类结果[26]。单类随机森林算法是一种结合随机森林算法与模拟生成的非目标类样本的单类分类方法, 主要包括两个步骤: 1)利用目标类样本, 估计(模拟)非目标类样本的分布; 2)利用随机子空间方法, 降低非目标类样本特征空间的维度。
改进的单类随机森林算法使用的非目标类样本不是模拟生成的, 而是从整体图像的未标记样本中随机筛选出来, 使得非目标类信息更准确[10]。该算法的主要步骤如下: 1)从研究区图像中手动地选取目标类样本, 从不包括这些目标样本的剩余图像中随机选择未标记的样本, 并将其视为非目标样本; 2)将这些随机生成的未标记样本(非目标样本)和人工选取的目标样本作为随机森林算法的输入, 得到初始的分类结果; 3)选择分类结果中后验概率高于指定阈值的非目标类样本(即可靠的非目标类样本)作为非目标样本, 然后将更新后的非目标样本以及目标样本用于随机森林分类, 得到最终的单类分类结果。
利用改进的单类随机森林算法, 基于不同的特征对作物幼苗进行分类。将原始可见光图像和亮度图像作为分类特征(光谱特征), 得到基于光谱特征的作物幼苗图像分类结果。将原始可见光图像和形态学特征作为分类特征(形态学特征), 得到基于形态学特征的作物幼苗图像分类结果, 用于后续作物幼苗行线的提取。
采用霍夫变换(Hough transformation)[27]提取农田中的作物幼苗行线。霍夫变换是一种基于数学空间中点和线的对偶性的直线检测方法[27], 其基本思想是将原图像上所有的点变换到参数空间中, 通过设置参数空间中坐标与原图像的对应关系, 将原图像中的点对应到参数空间中的一条线, 原图像中位于一条直线上的多个点在参数空间形成的多条线会相交于同一点, 即该交点与原图像中的这条直线有对应关系。为了寻找原图像中存在的直线(由多个点组成), 统计参数空间中每个点经过线的次数, 其中经过线的次数最多的点即为峰值点。这个峰值点代表原图像中的直线, 也就是所要寻找的直线[27]。霍夫变换在计算机视觉领域已经得到广泛的研究和应用[28−29], 也用于提取作物行垄的中心线[19,30−31]。
不同于现有研究中直接将原始图像作为霍夫变换的输入[20], 本研究将基于形态学特征的图像分类结果作为霍夫变换的输入图像。在基于形态学特征的图像分类结果中, 与幼苗尺寸差异较大的植被类别和非植被类别被去除, 作物幼苗和少量尺寸相近的其他类别地物被保留。因此, 将基于形态学特征的图像分类结果作为霍夫变换的输入图像, 可以突出作物幼苗信息, 提高作物幼苗行线提取结果的准 确度。
利用霍夫变换提取作物幼苗行线时, 将输入图像(分类结果)转换到参数空间后, 从中筛选代表作物行线所在直线位置的峰值点[27], 然后将这些峰值点从参数空间转换到输入图像, 根据输入图像确定行线的起止点, 并确定作物幼苗行线的具体位置。
本文将基于光谱特征的作物幼苗图像分类结果与提取的作物幼苗行线相结合, 得到最终的幼苗分布信息提取结果。采用缓冲区分析方法, 首先利用提取的作物幼苗行线和从图像中分析得到的作物行线间隔, 建立缓冲区, 确定作物幼苗的分布位置; 然后将作物幼苗分类的初步结果与得到的缓冲区(作物幼苗分布位置)叠加, 保留幼苗分布位置(缓冲区)内的分类结果, 将非缓冲区的幼苗剔除, 得到最终的作物幼苗分布信息提取结果。
采用包括用户精度(UA)、生产者精度(PA)、总体精度(OA)和 F1 值在内的 4 个精度评价指标, 定量地评价本文方法的效果。
采用以下 4 种方法与本文方法进行对比: 1)基于光谱特征的作物幼苗图像分类结果, 记为 SF; 2)基于形态学特征的作物幼苗图像分类结果, 记为SMP; 3)使用霍夫变换, 从光谱特征分类结果中提取作物行线优化(HSF)结果, 记为 SF+HSF; 4)使用霍夫变换, 从形态学特征分类结果中提取作物行线优化(HSMP)结果, 记为 SMP+HSMP。前 3 种方法都是单独利用形态学特征或霍夫变换, 没有将二者结合起来。第 4 种方法与本文方法都采用形态学特征和霍夫变换, 使用相同的作物行线, 但优化选取的对象不同, 第 4 种方法选取的是基于形态学特征的图像分类结果, 本文方法选取的是基于光谱特征的图像分类结果。
为了全面地评价本文方法的有效性, 选取两个包含玉米幼苗的地区采集无人机图像, 用于玉米幼苗分布信息的提取, 并比较本文方法与其他方法的提取结果。
2.1.1研究区1的概况和无人机图像
研究区 1 位于河南省新乡市七里营镇罗滩村, 其中心位置的地理坐标为 35°7′56″N, 113°45′34″E。该地区为暖温带大陆性季风气候, 四季分明, 气候温和, 年平均气温为 14℃, 7 月平均气温为 27.3℃, 1月平均气温为 0.2℃, 光‒热‒水资源丰富, 具有玉米生长的良好生态环境。
2019 年 5 月 23 日, 采用大疆无人机搭载的 FC-330 相机在研究区 1 采集无人机影像, 其图像和对应的亮度图像如图 2 所示。从图 2(a)可看出, 玉米幼苗尺寸较大, 轮廓较清晰, 主要位于图像的右上方。图中左侧和右下角主要是草地, 构成较为复杂, 尺寸与玉米幼苗差异较大。在亮度图像(图 2(b))中, 土壤亮度值最高, 玉米幼苗和其他植被亮度值较低。虽然玉米幼苗和其他植被的亮度值相近, 但玉米幼苗的亮度值比周围地物低, 其他植被的亮度值比周围地物高。
2.1.2研究区1不同地物类别的形态学剖面
根据研究区 1 中幼苗的尺寸, 计算 10 个尺度下亮度图像的形态学剖面特征。为了分析不同地物类别形态学特征的差异, 选取幼苗、土壤、草丛、其他植被和建筑物 5 类地物样本, 分别统计它们的形态学剖面和差值剖面。形态学剖面(图 3(a))展示地物亮度值随尺度的变化, 大部分地物的亮度值都随着图像从闭运算剖面到开运算剖面逐步降低, 其中幼苗的变化幅度最大, 草丛和其他植被幼苗变化幅度相对较小, 土壤和建筑物等非植被地物亮度值较高, 但变化幅度不大。从形态学差值剖面(图 3(b))可以看出, 幼苗的亮度值不仅变化幅度最大, 而且变化的位置也与其他地物不同。这是因为亮度值低的地物结构变化会体现在闭剖面中, 亮度值高的地物结构变化体现在开剖面中, 相较于周围地物, 幼苗的亮度值更低, 因此变化体现在闭剖面部分。根据幼苗与其他类别地物在形态学剖面和差值剖面中的差异, 可以准确地提取幼苗。

图像大小为2000×2000像元
图2 研究区1的无人机图像(a)和亮度图像(b)
Fig. 2 UAV image (a) and lightness image (b) of the first study area
2.1.3研究区1玉米幼苗的图像分类和行线提取
使用改进的单类随机森林算法, 分别利用无人机图像的光谱特征和形态学特征对研究区 1 进行玉米幼苗的图像分类, 结果如图 4 所示。所采用的算法参数设置如下: 树的个数为 200, 最大树深为 10, 子特征个数为总特征个数的平方根加 1[24]。参照史忠奎等[10]的方法, 参与训练的正类样本从研究区 1各处选取, 数量为 6741, 约占所有幼苗样本的 5%。

(a)中 L 表示亮度图像, Cn 表示第 n 尺度下的闭运算剖面值, On 表示第 n 尺度下的开运算剖面值; (b)中 C_n 表示第 n 尺度下的闭运算差值剖面值, O_n 表示第 n 尺度下的开运算差值剖面值
图3 研究区1不同地物亮度的形态学剖面和形态学差值剖面
Fig. 3 Morphological profile and morphological difference profile of different surface features lightness in the first study area
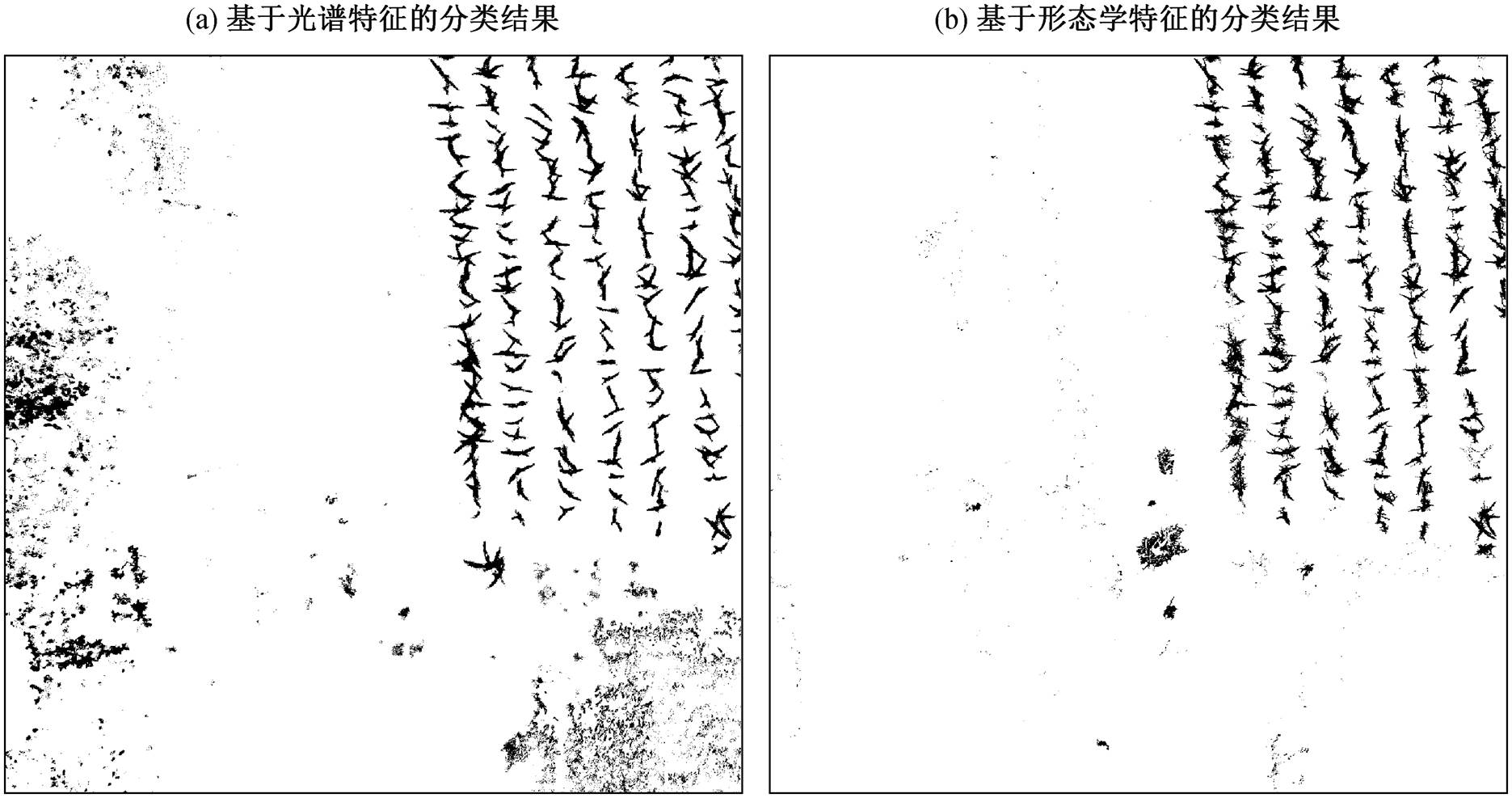
图4 研究区1的玉米幼苗的图像分类结果
Fig. 4 Corn seedling classification results of the first study area
基于光谱特征的玉米幼苗图像分类(图 4(a))得到的玉米幼苗分布信息较为准确, 但将一些其他植被错分为玉米幼苗。基于形态学特征的玉米幼苗图像分类(图 4(b))不仅准确地识别出大部分玉米幼苗, 而且错分情况也远少于基于光谱特征的图像分类结果, 更准确地识别出玉米幼苗的分布位置。
通过霍夫变换, 从基于形态学特征的图像分类结果中得到玉米幼苗行线, 结果如图 5 所示。可以看出, 得到的行线都与玉米幼苗所在位置重叠, 即使在玉米田外侧有少量错分情况, 也未提取出错误的玉米幼苗行线。
2.1.4研究区 1 不同方法的作物幼苗发布信息提取结果对比
表 1 列出本文方法和 4 种对比方法对研究区 1玉米幼苗分布信息提取结果的精度。
从总体精度(OA)和 F1 值来看, SF 方法的 OA= 95.8%, F1=59.5%, 在 4 种对比方法当中精度最低; SMP 方法(加入形态学特征)的图像分类精度得到提高, OA 比 SF 方法高出 1.9%, F1 值比 SF 方法高出12.7%精度。通过霍夫变换进行优化后, OA 和 F1 均得到提高, 其中 SF+HSF 的 F1 比 SF 方法高出 8.5%, SMP+HSMP 的 F1 比 SMP 方法高出 2.6%。本文方法(SF+HSMP)的 OA=98.7%, F1=82.6%, 均高于 4 种对比方法。
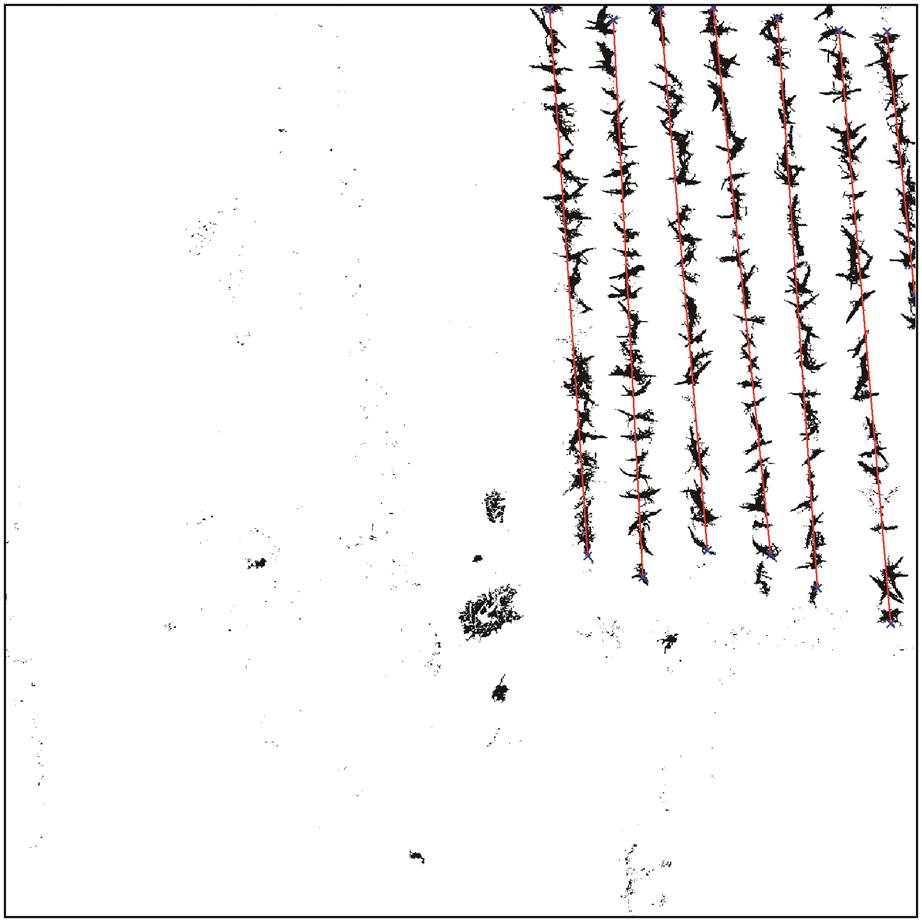
黑色部分为幼苗分类结果, 红线为玉米幼苗行线, 蓝色×号表示行线起止点, 下同
图5 利用霍夫变换提取的研究区 1 玉米幼苗行线
Fig. 5 Corn seedling rows extracted by Hough transform of the first study area
表1 利用不同方法得到的研究区1的玉米幼苗分布信息提取结果精度
Table 1 Accuracies of corn seedling mapping results obtained by different methods in the first study area

方法UA/%PA/%OA/%F1/% SF49.175.595.859.5 SMP72.571.997.772.2 SF+HSF66.669.597.368.0 SMP+HSMP78.971.098.074.8 SF+HSMP (本文方法)93.374.298.782.6
从玉米幼苗图像分类的用户精度(UA)和生产者精度(PA)来看, SF 方法的 UA 仅为 49.1%, 在 5 种方法中最低, 但 PA=75.5%, 在 5 种方法中最高。加入形态学特征后, 虽然 SMP 方法的 PA 降低 3.6%, 但 UA 提高 23.4%。通过霍夫变换进行优化后, 两种方法的 PA 均有所降低, 但 UA 得到显著提高(如SMP+HSMP 的 PA 仅比 SMP 降低 0.9%, 但 UA 高出6.4%)。本文方法的 UA=93.3%, 显著高于 4 种对比方法; PA=74.2%, 仅次于 SF 方法。
上述结果表明, 本文方法的提取精度均高于 4种对比方法。
图 4 和 6 中, 图像右上角区域为玉米田, 玉米幼苗分布其中。可以看出, 虽然 SF 方法得到的玉米幼苗分布范围较为完整, 但玉米田外存在大量错分现象, 如玉米田左侧的一些草丛和下方的其他植被; 虽然 SMP 方法玉米田外错分植被较少, 但玉米幼苗周围存在部分错分; 虽然 SF+HSF 是在 SF 方法的基础上使用霍夫变换提取行线进行优化, 但由于玉米田外错分植被较多, 错误地在玉米田外提取到玉米幼苗行线, 不能得到准确的玉米幼苗分布位置; 本文方法(SF+HSMP)在 SF 方法的基础上去除了玉米田外的错分现象, 有效地提高了用户精度。本文方法能够通过形态学特征分类结果得到准确的玉米幼苗行线, 然后用玉米幼苗行线去优化光谱特征的分类结果, 最终得到的提取结果最优。
2.2.1研究区2的概况和无人机图像
研究区 2 位于建立在河北省怀来县的中国科学院怀来遥感综合试验站, 其中心位置的地理坐标为40°20′57″N, 115°47′5″E。怀来县地处中温带半干旱区, 属温带大陆性季风气候, 四季分明, 光照充足, 雨热同季, 昼夜温差大。本研究的无人机图像采集时间为 2021 年 5 月 29 日, 研究区的图像如图 7(a)所示。可以看出, 玉米幼苗主要位于图像左下方的玉米田内, 但尺寸较小, 且未呈现明显的绿色, 玉米田内也存在太阳能板和传感器等设施; 玉米田外有较大面积的草丛, 图像上方和右侧荒地中也有其他植被。在亮度图像(图 7(b))中, 虽然玉米幼苗的亮度与大部分非植被地物存在差异, 但与玉米田外围的植被以及玉米田中田垄和设施下的阴影相近, 容易混淆。
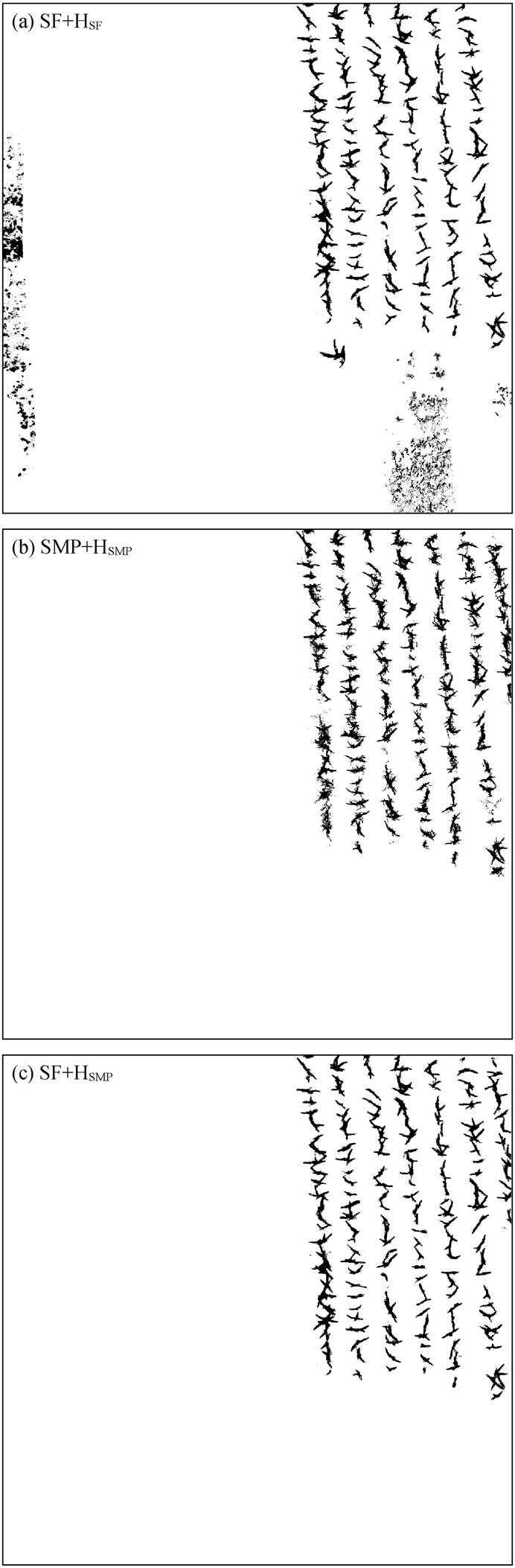
图6 利用不同方法得到的研究区1玉米幼苗分布信息提取结果
Fig. 6 Mapping results of corn seedlings obtained by different methods in the first study area
2.2.2研究区2玉米幼苗的图像分类和行线提取
使用改进的单类随机森林算法, 分别利用光谱特征和形态学特征对研究区 2 进行玉米幼苗分类, 结果如图 8 所示。算法参数设置如下: 树的个数为200, 最大树深为 10, 子特征个数为总特征个数的平方根加 1[24]。参照史忠奎等[10]的方法, 参与训练的正类样本从研究区 2 各处选取, 数量为 517, 约占所有幼苗样本的 3%。
基于光谱特征的分类结果(图 8(a))中, 将玉米田外大量植被错误地分类; 虽然在玉米田内部提取到大部分幼苗, 但在玉米田的田垄处和设施的阴影处, 部分地物被错误地识别; 在玉米田内部右侧, 虽然准确地识别出玉米幼苗, 但存在对植被的错分现象。基于形态学特征的分类结果(图 8(b))中, 对玉米幼苗的识别总体上较为准确, 但局部存在错误和遗漏现象; 图 8(b)右侧的荒地处, 部分与幼苗尺寸相近的其他植被被错分, 同时在玉米田的田垄附近和右侧也出现幼苗的缺失, 未能完整地反映幼苗分布位置。
通过霍夫变换, 从基于形态学特征的分类结果中得到玉米幼苗行线(图 9)。可以看出, 这些行线能够大致反映玉米幼苗的分布位置, 同时很好地排除了基于形态学特征的分类结果中玉米田外侧错误分类的影响。但是, 玉米田内部右侧和田垄处存在玉米幼苗行线部分缺失的现象, 这是因为分类结果中未能识别出来, 所以得不到这些区域的玉米幼苗行线。
2.2.3 研究区2不同方法作物幼苗提取结果对比
表 2 比较本文方法与其他 4 种方法提取研究区2 玉米幼苗分布信息的精度。
从总体精度(OA)和 F1 来看, SF 方法的 OA 和F1值均最低, 分别为 89.9%和 22.2%; SMP 方法(加入形态学特征)的 OA 和 F1 均得到显著提升, 分别为98.0%和59.2%。通过霍夫变换进行优化后, 两种方法的 OA 和 F1 都有所提升, SF+HSF 方法的 F1 比 SF方法高出 26.9%, SMP+HSMP 方法的 F1 比 SMP 方法高出 2.6%。本文方法(SF+HSMP)的 OA=98.5%, 高于 4 种对比方法, F1=60.8%, 只略低于 SMP+HSMP方法。

图像大小为1000×1000像元
图7 研究区2的无人机图像(a)和亮度图像(b)
Fig. 7 UAV image (a) and lightness image (b) of the second study area

图8 研究区2玉米幼苗图像分类结果
Fig. 8 Corn seedling classification results of the second study area
从用户精度(UA)和生产者精度(PA)来看, SF 方法的 UA=13.3%, 为最低; SF 和 SMP 方法的 PA= 66.9%, 均为最高。通过霍夫变换进行优化后, PA不同程度地降低, UA 得到提高, 其中 SMP+HSMP 方法的 PA 比 SMP 方法降低 4.4%, UA 则提高 8.0%。相较于 4 种对比方法, 本文方法虽然 PA 较低, 仅为 54.8%, 但 UA 最高, 为 68.3%。从上述结果来看, 相较于 4 种对比方法, 本文方法的精度最高。
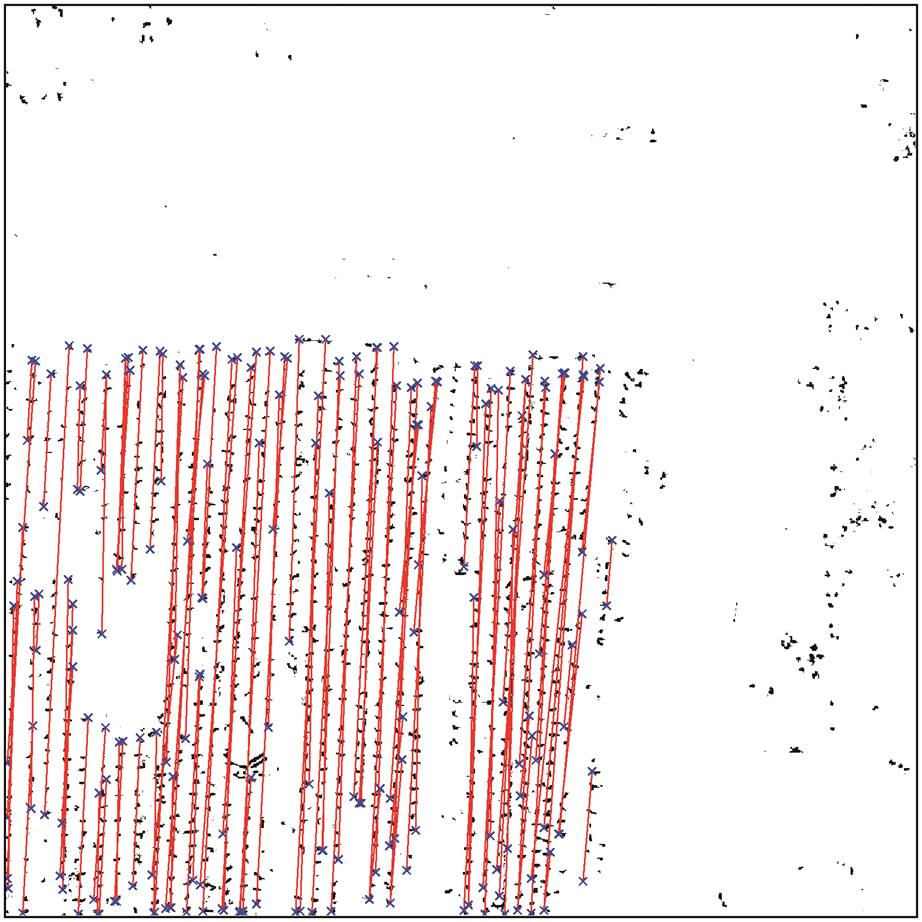
图9 利用霍夫变换提取的研究区 2 玉米幼苗行线
Fig. 9 Corn seedling rows extracted by Hough transform of the second study area
表2 利用不同方法得到的研究区2玉米幼苗分布信息提取结果精度
Table 2 Accuracies of corn seedling mapping results obtained by different methods in the second study area

方法UA/%PA/%OA/%F1/% SF13.366.989.922.2 SMP53.166.998.059.2 SF+HSF46.252.397.749.1 SMP+HSMP61.162.598.361.8 SF+HSMP (本文方法)68.354.898.560.8
图 8 和 10 中, 图像左下角区域为玉米田, 玉米幼苗分布其中。可以看出, SF 的分类结果中, 玉米田外侧有较多植被错分为玉米幼苗, SMP 的分类结果中仅玉米田右侧荒地中有少部分错分。经过霍夫变换优化后的 SF+HSF 方法玉米幼苗提取结果中, 玉米田外仍有少部分错分, 且部分玉米幼苗被错误地去除; 经过霍夫变换优化后的 SMP+HSMP 的玉米幼苗提取结果中, 玉米幼苗大部分得到保留, 玉米田外的错分也得到有效的去除。从整体上看, 本文方法和 SMP+HSMP 方法的玉米幼苗提取结果最佳。这两种方法的分类结果都基于同样的玉米幼苗行线优化而来, 有效地去除了其他植被的影响, 得到的玉米幼苗分布位置基本上准确。两种方法提取结果的区别在于得到的单个玉米幼苗大小和形状有所不同, 主要是因为图像中玉米幼苗尺寸较小, 导致玉米幼苗提取结果有所差异。
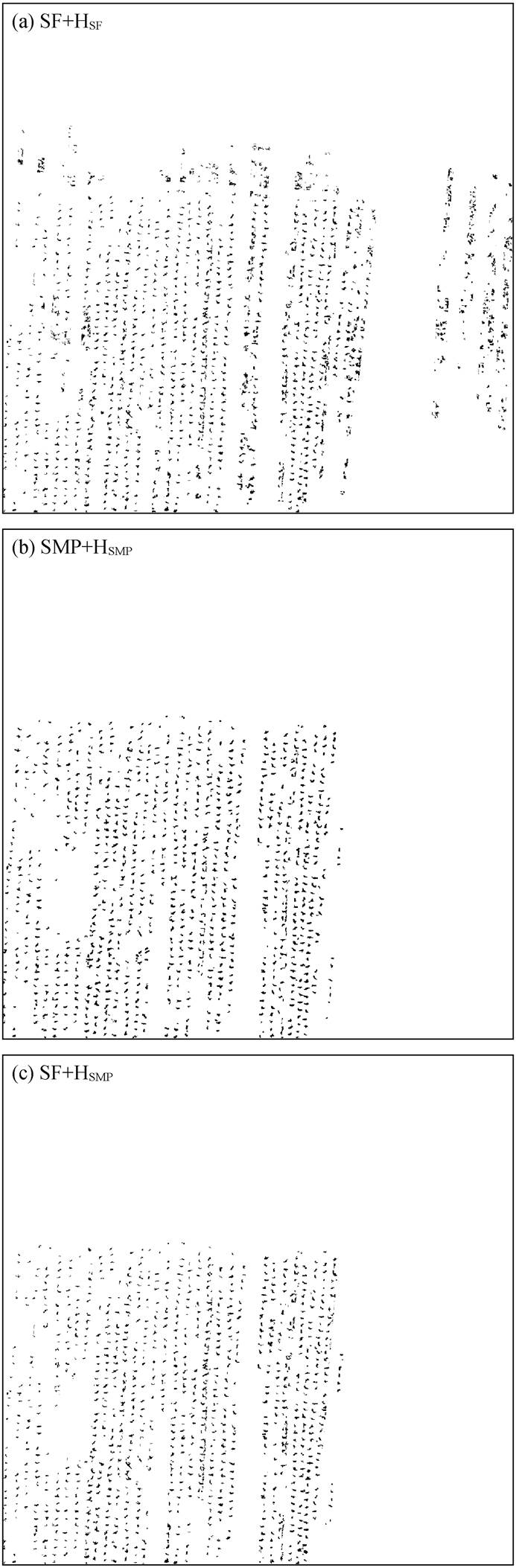
图10 利用不同方法得到的研究区 2 玉米幼苗分布信息提取结果
Fig. 10 Mapping results of corn seedlings obtained by different methods in the second study area
本文提出一种综合利用光谱特征、形态学特征和霍夫变换从无人机图像中提取玉米幼苗分布信息的方法。利用光谱特征, 能够较准确地提取玉米幼苗分布信息; 利用形态学特征, 能够有效地去除其他植被的干扰; 通过霍夫变换, 能够有效地结合两种特征的优点。
通过分析两个研究区玉米幼苗分布信息的提取结果可以看出, 相较于 4 种对比方法, 本文方法效果最好。使用光谱特征对玉米幼苗进行分类时, 虽然能提取所有玉米幼苗, 但不能有效地区分玉米幼苗与其他植被。利用形态学特征对玉米幼苗进行分类时, 虽然能有效地区分玉米幼苗和大部分其他植被, 但容易将尺寸相近的其他植被错分为玉米幼苗, 特别是玉米幼苗形状和大小不一致时容易出现漏分。本文提出的方法结合了光谱特征和形态学特征的优点, 并利用霍夫变换提取的玉米幼苗行线去优化初步的分类结果, 既能提取到绝大部分玉米幼苗的分布信息, 又能避免其他植被的影响。
在利用霍夫变换提取玉米幼苗行线时, 本文采用基于形态学特征的图像分类结果作为输入, 得到较准确的玉米幼苗行线(图 5 和 9), 为后续的结果优化提供了保障。
目标类别结构特征的识别对分类结果存在一定的影响。研究区 2 中玉米幼苗尺寸较小, 使得结构特征不易识别, 影响玉米幼苗行线的提取。因此, 在较大的区域应用本文方法时, 对结构特征明显且较整齐的玉米幼苗提取效果较好。后续工作中将针对具有复杂结构的作物幼苗场景, 对本文方法进行改进。
参考文献
[1] 王亚莉, 贺立源. 作物生长模拟模型研究和应用综述. 华中农业大学学报, 2005, 24(5): 107–113
[2] 田振坤, 傅莺莺, 刘素红, 等. 基于无人机低空遥感的农作物快速分类方法. 农业工程学报, 2013, 29(7): 109–116
[3] 刘俊杰, 林晓龙, 胡伟. 无人机遥感技术在农业调查中的应用与展望. 中国统计, 2017(6): 40–42
[4] 刘志, 贺正, 苗芳芳, 等. 基于无人机的水肥一 体化玉米出苗率估算方法与试验. 浙江农业学报, 2019, 31(6): 977–985
[5] 雷亚平, 韩迎春, 王国平, 等. 无人机低空数字图像诊断棉花苗情技术. 中国棉花, 2017, 44(5): 23–25
[6] 赵必权, 丁幼春, 蔡晓斌, 等. 基于低空无人机遥感技术的油菜机械直播苗期株数识别. 农业工程学报, 2017, 33(19): 115–123
[7] Pearse G D, Tan A Y S, Watt M S, et al. Detecting and mapping tree seedlings in UAV imagery using con-volutional neural networks and field-verified data. ISPRS Journal of Photogrammetry and Remote Sen-sing, 2020, 168: 156–169
[8] Barreto A, Lottes P, Yamati F R I, et al. Automatic UAV-based counting of seedlings in sugar-beet field and extension to maize and strawberry. Computers and Electronics in Agriculture, 2021, 191: 106493
[9] Liu S B, Yin D M, Feng H K, et al. Estimating maize seedling number with UAV RGB images and advan- ced image processing methods. Precision Agriculture, 2022, 23(5): 1604–1632
[10] 史忠奎, 李培军, 罗伦, 等. 基于形态学属性剖面和单类随机森林分类的道路路域新增建筑物提取方法. 北京大学学报(自然科学版), 2018, 54(1): 105–114
[11] Shackelford A K, Davis C H, Xiangyun W. Automated 2-D building footprint extraction from high-resolution satellite multispectral imagery // Proceedings of the IGARSS. Anchorage, 2004: 1996–1999
[12] Pagot E, Pesaresi M. Systematic study of the urban postconflict change classification performance using spectral and structural features in a support vector machine. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2008, 1(2): 120–128
[13] Pesaresi M, Benediktsson J A. A new approach for the morphological segmentation of high-resolution satel-lite imagery. IEEE Transactions on Geoscience and Remote Sensing, 2001, 39(2): 309–320
[14] Dell’acqua F, Gamba P, Ferrari A, et al. Exploiting spectral and spatial information in hyperspectral ur-ban data with high resolution. IEEE Geoscience and Remote Sensing Letters, 2004, 1(4): 322–326
[15] Mura M D, Benediktsson J A, Bruzzone L. Modeling structural information for building extraction with morphological attribute filters // Proceedings of SPIE. Berlin: the International Society for Optical Enginee-ring, 2009: 747703-1–747703-9
[16] Bah M D, Hafiane A, Canals R. CRowNet: deep network for crop row detection in UAV images. IEEE Access, 2020, 8: 5189–5200
[17] Gao J F, Liao W Z, Nuyttens D, et al. Fusion of pixel and object-based features for weed mapping using unmanned aerial vehicle imagery. International Journal of Applied Earth Observation and Geoinformation, 2018, 67: 43–53
[18] Lottes P, Chebrolu N, Liebisch F, et al. UAV-based field monitoring for precision farming [C/OL] // 25th Workshop on Computer Image Analysis in Agriculture. (2019–11–11)[2022–09–23]. https://www.researchgate. net/publication/337172108
[19] Åstrand B, Baerveldt A J. A vision based row-fol-lowing system for agricultural field machinery. Me-chatronics, 2005, 15(2): 251–269
[20] Bakker T, Wouters H, Van Asselt K, et al. A vision based row detection system for sugar beet. Computers and Electronics in Agriculture, 2008, 60(1): 87–95
[21] Agoston M K. Computer graphics and geometric mode-ling. London: Springer, 2005
[22] 张军国, 冯文钊, 胡春鹤, 等. 无人机航拍林业虫害图像分割复合梯度分水岭算法. 农业工程学报, 2017, 33(14): 93–99
[23] Tian M L, Ban S T, Yuan T, et al. Assessing rice lodging using UAV visible and multispectral image. International Journal of Remote Sensing, 2021, 42(23): 8840–8857
[24] Désir C, Bernard S, Petitjean C, et al. One class random forests. Pattern Recognition, 2013, 46(12): 3490–3506
[25] Khan S S, Madden M G. One-class classification: taxonomy of study and review of techniques. Know-ledge Engineering Review, 2014, 29(3): 345–374
[26] Breiman L. Random forests. Machine Learning, 2001, 45(1): 5–32
[27] Hough P V. Method and means for recognizing com-plex patterns. US Patent, 1962, 3(6): 3069654
[28] Duda R O, Hart P E. Use of the Hough transformation to detect lines and curves in pictures. Communications of the ACM, 1972, 15(1): 11–15
[29] Ballard D H. Generalizing the Hough transform to de-tect arbitrary shapes. Pattern Recognition, 1981, 13(2): 111–122
[30] Gée C, Bossu J, Jones G, et al. Crop/weed discri-mination in perspective agronomic images. Computers and Electronics in Agriculture, 2008, 60(1): 49–59
[31] Ji R H, Qi L J. Crop-row detection algorithm based on random Hough transformation. Mathematical and Computer Modelling, 2011, 54(3/4): 1016–1020
Mapping Corn Seedling Using Spectral, Morphological Features and Hough Transformation from UAV Images
Abstract Using spectral features, morphological features and Hough transformation from UAV images, a method of mapping corn seedling is proposed. First, spectral features and morphological features are extracted from UAV images and then are separately classified using an improved one-class random forest for mapping of corn seedling. Second, Hough transform is used to extract the corn seedling rows from the classification results with morphological features. Third, the corn seedling classification results with spectral features and the corn seedling rows from Hough transform are combined to obtain the final seedling mapping result. The proposed mapping method is evaluated in two study areas. The results demonstrated that the proposed method, effectively combines morphological features and Hough transform in mapping of corn seedling, thus obtaining better results compared with the existing methods.
Key words UAV remote sensing image; seedling mapping; morphological feature; Hough transform