
图1 三轴矢量磁强计照片
Fig. 1 Photograph of three axes vector magnetometer
doi: 10.13209/j.0479-8023.2022.111
国家重点研发计划(2021YFA0718600)和国家自然科学基金(41931073)资助
收稿日期: 2022–06–20;
修回日期: 2022–09–21
北京大学学报(自然科学版) 第59卷 第4期 2023年7月
Acta Scientiarum Naturalium Universitatis Pekinensis, Vol. 59, No. 4 (July 2023)
摘要 提出一种用于空间科学研究的基于低资源消耗各项异性磁阻传感器的矢量磁强计。该矢量磁强计的探测范围为±65000nT, –3dB 带宽为 DC~10Hz 的磁场波, 噪声功率谱密度≤0.2nT/Hz1/2@1Hz, 非线性误差≤3.6‱, 非正交性误差≤1.2‱。该磁强计搭载运行于太阳同步轨道的风云三号气象卫星(FY-3E), 在轨初步探测结果表明, 该磁强计具备探测空间磁场扰动(例如极光椭圆区的场向电流(20~60 nT))的能力。
关键词 低资源消耗磁阻传感器; 矢量磁强计; 空间科学应用
磁场是太阳系中最普遍的物理量, 对空间科学的研究具有重要意义[1]。地球空间运行的卫星测量到的磁场是地球内部产生的固有磁场与空间中发生的扰动(特别是磁暴期间)磁场的叠加, 扰动过程受太阳产生行星际磁场和太阳风动压的控制[2]。磁暴期间环电流中粒子通量的增强会导致近地轨道上磁场强度减小。在磁层的研究历史中, 磁强计一直是一个关键仪器, 不可或缺。地球的磁层中存在不同频率的磁场波动, 其频率范围在 mHz~10Hz 之 间[1,3]。由于磁通门磁强计和氦子磁力仪具有高精度和高可靠性的优势, 因此在空间磁场探测中一直占据统治地位, 其缺点是制造成本高和尺寸大。随着科学界对通过卫星搭载的磁强计进行空间磁场探测来研究磁层和太阳风相互作用的兴趣越来越大, 以及工程界对低资源消耗的空间磁场探测仪器的需求增加, 人们开始探讨采用其他类型的磁场传感器来进行空间磁场探测的可能性[1–2]。Diaz-Miche-lena[4]介绍了市场上可用的磁场传感器及其在空间探测应用中的实施步骤, 并指出这些磁强计在质量和体积等方面都有潜力应用到空间探测中, 然而, 它们目前的噪声水平等性能限制了在空间科学中的应用, 尤其是在一些大的空间科学卫星上的应 用[1]。Archer 等[5]和 Brown 等[6]在 CINEMA 卫星上装载一台基于低成本磁场传感器的矢量磁强计, 该磁强计在 DC~10Hz 波段的灵敏度优于 3nT, 其在轨科学数据显示了该类型磁场传感器在空间物理应用方面的潜在能力。
本文提出一种基于低资源消耗磁阻传感器的三轴矢量磁强计, 它搭载在运行轨道为太阳同步轨道的中国风云气象三号卫星晨昏星(FY-3E)上, 用于探测磁层中的波动。本文给出该仪器的地面标定实验结果以及在轨初步探测结果。
图 1 为三轴矢量磁强计的照片, 它包含 3 个单轴磁场传感器, 如图中红色虚线框所示。磁场传感器选用美国 Honywell 公司生产的各向异性磁阻传感器 HMC1001。矢量磁强计的尺寸(不包括金属外壳和数据采集部分)为 100mm×57mm, 重量为 50g, 功率≤1W。
以磁场传感器 HMC1001 为核心的三轴矢量磁强计的电路框图如图 2 所示。HMC1001 自带置位/复位(S/R)与偏置(OFFSET)功能管脚, 可以排除静场干扰和抵御强磁破坏[7–10]。S/R 信号由外部提供, 受振荡电路时钟控制, 脉冲幅度为 24V, 宽度为 2μs 左右。S/R 信号可以消除强磁场对磁场传感器的历史影响, 增强信号输出, 有效地消除温漂和非线形失真等影响, 大大地提高磁阻传感器的灵敏度。放大器将 HMC1001 输出的信号进行放大, 并送至相敏解调电路进行解调, 随后经过差分放大电路和积分滤波电路, 得到放大的电压信号, 该电压信号与敏感轴向所加磁场成正比。相敏解调电路同时受振荡电路的时钟控制。输出的电压信号同时作为 OFFSET 进行反馈, 使得整个电路处于闭环工作模式。OFFSET 电路是一个压控电流源电路, 其输出电流施加在线圈上, 产生可与外磁场相抵消的磁场信号。这样, 整个电路处在闭环工作模式, 能够稳定电路的工作状态和放大倍数, 减小非线性失真, 扩展频带。
图1 三轴矢量磁强计照片
Fig. 1 Photograph of three axes vector magnetometer
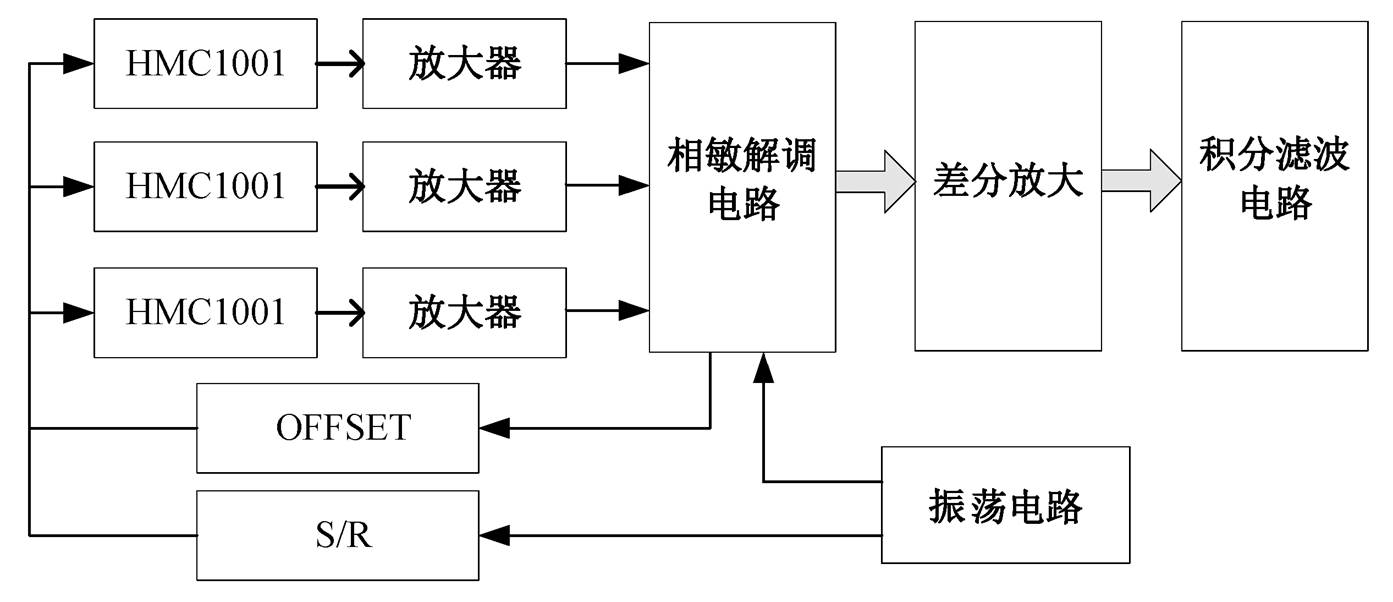
图2 矢量磁强计的电路框图
Fig. 2 Circuit diagram of vector magnetometer
磁强计测试和标定的内容主要包括噪声、非线性度和灵敏度、–3dB 带宽、温度特性和非正交性等。实验分别在中国船舶重工总公司第 710 研究所国防科技弱磁一级计量站和北京大学进行。
噪声性能代表可检测到的外加磁场的最小变化, 是磁场传感器的重要指标。为了获取磁场传感器的真实本底噪声性能, 需要一个稳定的磁场环境, 使得环境磁场的扰动远小于仪器本身的测量噪声。
将磁场传感器探头放入如图 3 所示的 6 层坡莫合金屏蔽筒, 隔离外界磁场, 在磁扰动非常小的零磁空间内测量传感器的本底噪声。在一段时间里, 磁强计连续工作, 记录测量数据, 从而获取磁场传感器的噪声参数。
噪声功率谱密度在整个频率上表现为 1/f 噪声, 一般选取 1Hz 处的噪声功率谱密度作为噪声指 标[1]。我们使用快速傅立叶变换来计算噪声功率谱密度。噪声的测试结果表明, 磁强计 3 个方向的噪声功率谱密度均≤0.2nT/ @1Hz, 其中一个方向的噪声功率谱密度如图 4 所示。
@1Hz, 其中一个方向的噪声功率谱密度如图 4 所示。
要使传感器产生可靠的测量数据, 它的输出电压和所加磁场必须是线性的。也就是说, 在仪器测量范围内, 被测磁场的变化必须导致仪器输出的电压等比例变化。

图3 用于磁强计性能测试的6层坡莫合金屏蔽筒
Fig. 3 Six-layer permalloy shield used for the charac-terization of the vector magnetometer
由于种种原因, 磁强计的输入输出实际上不可能是完全线性的。为了测试磁强计的非线性度, 采用如图 5 所示的实验装置对磁强计进行测试。该实验装置包含两套线圈系统, 一套用于抵消地磁场, 使得线圈内部的剩余地磁场为~nT, 另一套用于产生标准的磁场, 供磁强计标定使用。将传感器放置在实验装置的中心位置, 同时, 微调传感器被测轴的指向, 使得输出值达到最大。改变输入磁场的大小分别为±10000, ±20000, ±30000, ±40000, ±50000, ±60000 和±65000nT。每个输入磁场保持 100s 以上, 同时记录输出电压数据。完成传感器单个轴向的测试后, 改变传感器轴向指向, 重复上述实验步骤, 测量另外两轴向的性能。根据实际测量值进行拟合计算, 得到每个轴向的转换系数、非线性误差和量程范围等参数。
测试结果如表 1 所示。其中, 线性拟合方程为
B =KV + B0,
其中, V 为磁强计的输出电压, K 为线性拟合系数, B0 为线性拟合零点, B 为所施加的磁场。测试结果表明, 在量程为±65000nT 的情况下, 最大非线性误差为 3.6‱。与传统的磁通门磁强计相比, 非线性误差偏大。传统的磁通门磁强计采用双线圈结构, 即反馈线圈和感应线圈, 并且反馈线圈与感应线圈往往是分开的。反馈线圈的几何特性也决定了反馈到磁芯上的磁场的均匀性, 在一定程度上决定着系统的线性度[11]。因磁阻磁强计反馈线圈的尺寸较小, 因而影响反馈到传感器上的磁场的均匀性, 造成系统的线性度较差。

图4 磁强计一个方向的噪声功率谱密度
Fig. 4 Noise power spectral density of one direction of the magnetometer

图5 磁强计性能测试设备
Fig. 5 Magnetic field performance testing equipment
表1 非线性度和灵敏度测试结果
Table 1 Testing results for non-linearity and sensitivity

轴向拟合系数K拟合零点B0非线性误差/‱ X–66207.8–3997.71 2.6 Y–69651.7–11425.30 3.1 Z–67211.7–2011.99 3.6
为了评价磁强计的频率响应, 将传感器置于屏蔽筒内, 外加 DC~20Hz 的正弦信号, 固定磁场峰峰值为 50000nT 左右。输出电压随频率的变化而变化, 由此可以计算磁强计的频率响应性能。计算结果表明, 3 个轴的–3dB 带宽均为 DC~10Hz。其中, 单个轴的频响曲线如图 6 所示。
对三轴磁强计而言, 3 个分量应彼此垂直, 但实际工程应用中存在加工误差, 使得探头机械轴和磁轴不一致[12–13]。
磁场的 3 个分量的平方和为总磁场的平方, 所以当一个理想的三轴磁强计在恒定磁场中旋转时, 测量到的磁场三分量将形成一个球体。对于实际的三轴磁强计, 存在标定因子误差(3 个轴分别为 a, b和 c)、角度偏差(定义为三轴之间的正交性偏差)和零点偏移量(3 个轴分别为 x0, y0 和 z0)。因此, 实际三轴磁强计测量到的磁场三分量由球体扭曲为中心偏离原点的椭球体[14]。

图6 单个轴的频率响应曲线
Fig. 6 Frequency response curve of single axis
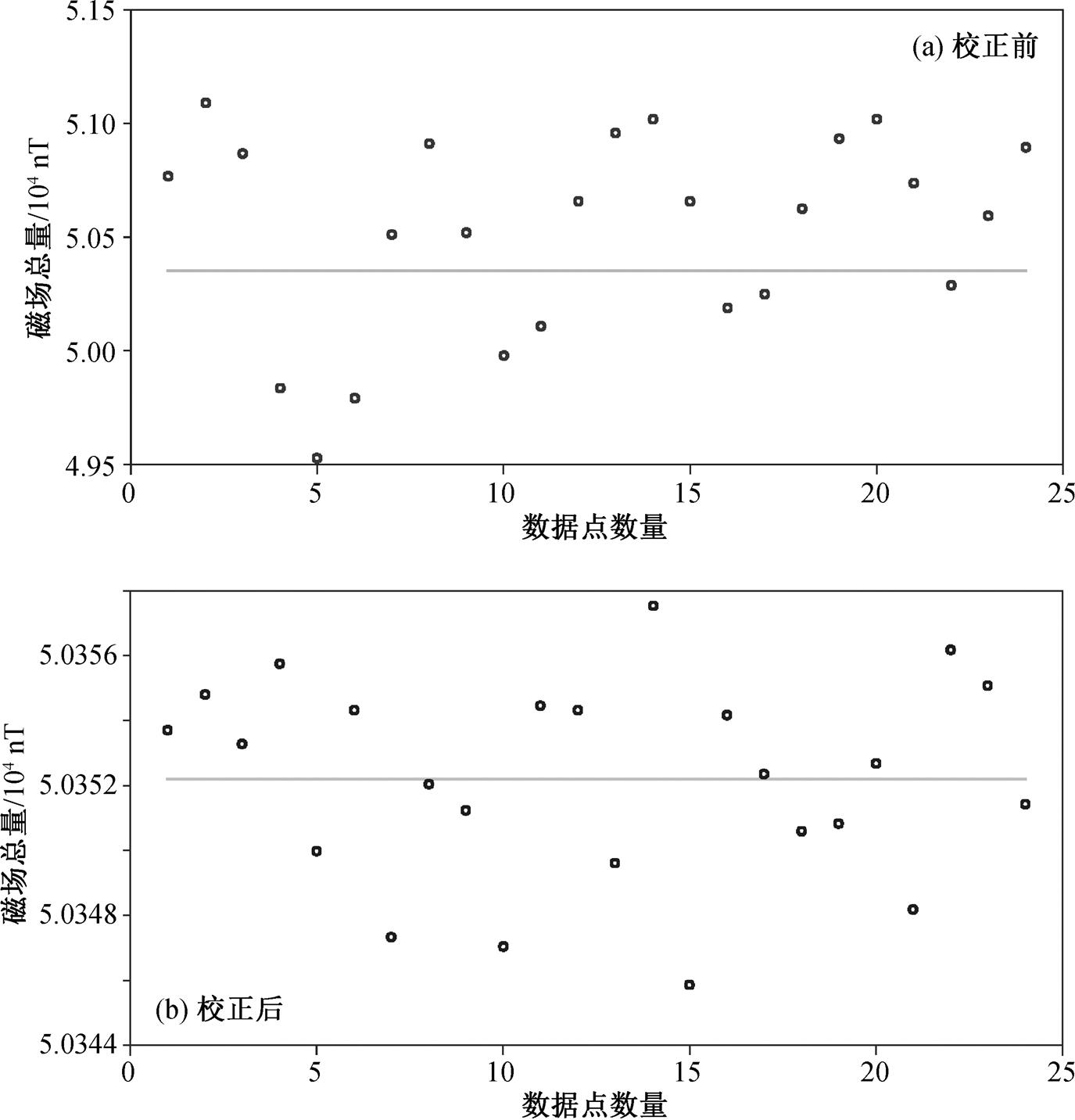
图7 校正前后的磁场总量的相对偏差
Fig. 7 Deviation of total magnetic field before and after correction
将磁强计的传感器置于如图 5 所示的屏蔽线圈内, 外加幅值为 50000nT 左右的恒定磁场。将传感器在球体上均匀地旋转 24 个方位角, 传感器在每个方位角停留并采集至少 100 秒数据。利用旋转椭球法[15–17]计算非正交校准系数, 并对测量到的磁场数据进行修正。校正前后磁场总量的相对偏差如图 7所示。可以看出, 校正前的总磁场最大偏差为 785nT; 校正后的总磁场最大偏差为 6nT, 最大相对误差 1.2‱。
磁阻磁强计温度不稳定性的原因是, 半导体磁阻材料的电学参数(尤其是电阻)对温度变化比较敏感。研究表明, HMC1001 的灵敏度受温度的影响很小, 而零点受温度的影响很大[5–6]。零点温度漂移会严重地影响磁强计的测量精度。在实际应用中, 需对磁阻传感器进行相应的温度补偿, 以便减小温漂。本文采用数据修正的方法进行温度补偿, 即事先对磁阻磁强计在每个温度下的零点输出进行测量。实际使用时, 传感器本身携带一个温度传感器, 可以实时测量传感器的温度, 以此对测量数据进行零点温度修正。
零点温度漂移实验在无磁高低温实验装置中进行, 如图 8 所示。首先, 将磁强计放置于无磁高低温实验装置中, 将温度加热到+55℃, 保温 1 小时, 待磁强计的温度均匀后, 将其放置于坡莫合金屏蔽筒内, 自然冷却到室温, 同步记录温度以及磁场输出随时间的变化。试验完成后, 将磁强计取出, 放回无磁高低温实验装置中, 制冷到–30℃, 保温 1 小时, 待磁强计温度均匀后, 将放置于坡莫合金屏蔽筒内, 自然升温到室温, 同步记录温度以及磁场输出随时间的变化。零点温度漂移实验结果如图 9 所示。

图8 无磁高低温实验装置
Fig. 8 Non-magnetic high and low temperature experimental device

图9 零点温度漂移实验结果
Fig. 9 Experimental results of zero temperature drift
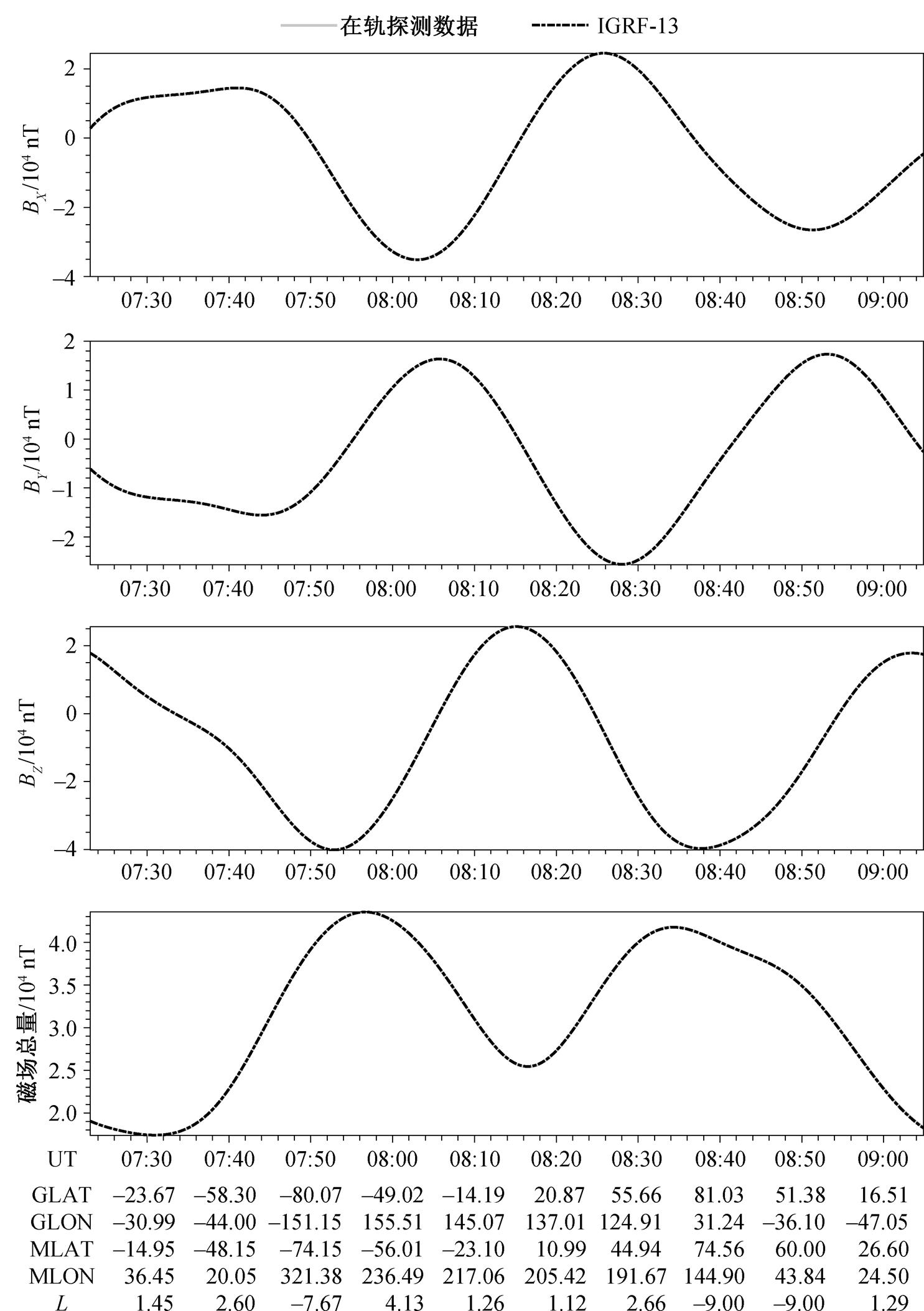
图10 首次在轨探测磁场数据与IGRF的比较
Fig. 10 Comparison of the first flight datawith IGRF
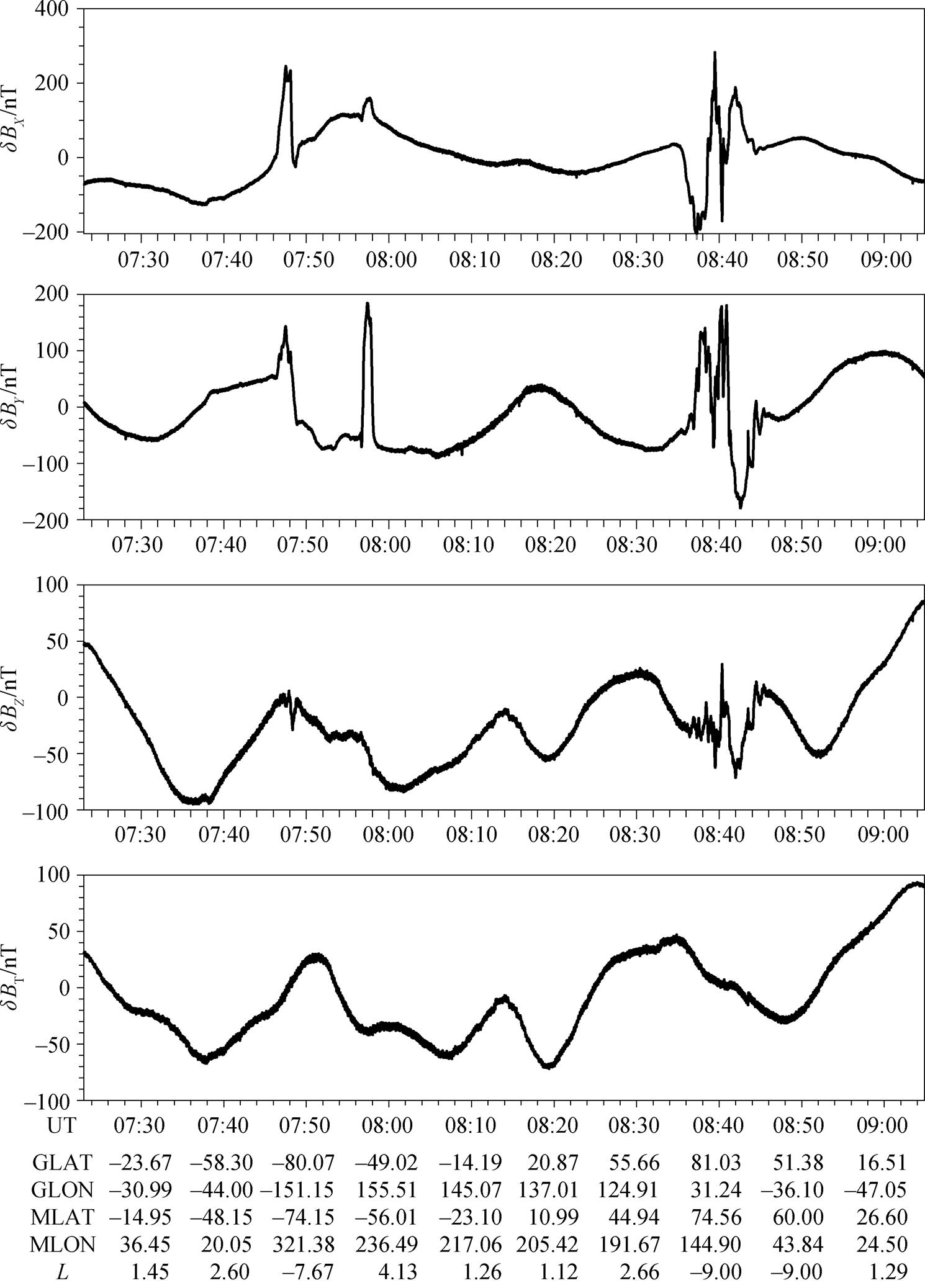
图11 减掉IGRF后的首次在轨探测磁场数据
Fig. 11 The first flight data after subtracting IGRF
该磁强计搭载运行于太阳同步轨道的风云三号气象卫星(FY-3E)。为了降低卫星本体产生的杂散磁场对磁场探测的影响, 磁强计探头安装在距离卫星本体 1m 外的桁架上。卫星于 2021 年 7 月 5 日发射, 顺利进入预期轨道。图 10 给出一轨(约 100 分钟)的磁场三分量和磁场总量的探测数据, 同时给出与 IGRF 模型的比较。IGRF 模型是地磁场的静态模型, 没有考虑磁层中的各种电流体系。由图 10 可以看出, 磁强计探测到的磁场与 IGRF 模型基本上一致, 验证了磁强计在轨探测数据的有效性和正确性。图 11 给出磁场探测数据减掉 IGRF 的磁场的数据, 可以清晰看到位于极光椭圆区的场向电流(20~ 60nT), 表明该磁强计具备探测空间波动(例如极光椭圆区的场向电流(20~60 nT))的能力。
本文介绍一种用于空间科学研究的基于低资源消耗磁阻传感器的矢量磁强计。该磁强计搭载并运行于太阳同步轨道的风云三号气象卫星(FY-3E)。在轨初步探测结果表明, 该磁强计具备探测空间磁场扰动(例如极光椭圆区的场向电流(20~60nT))的能力。因此, 本文提出的矢量磁强计适用于在星载平台进行空间天气尤其是地磁活动的研究。
致谢 感谢国家卫星气象中心提供在轨数据。
参考文献
[1]Regoli L, Moldwin M B, Pellioni M, et al. Investiga-tion of a low-cost magneto-inductive magnetometer for space science applications. Geosci Instrum Me-thod Data Syst, 2018, 7: 129–142
[2]Moldwin, M. An introduction to space weather [EB/ OL]. (2012–06) [2021–11–12]. https://doi.org/10.1017/ CBO9780511801365
[3]Rae I J, Watt C E J. ULF waves above the nightside auroral oval during substorm onset [EB/OL]. (2016–02–12) [2021–11–12]. https://doi.org/10.1002/978111 9055006.ch7
[4]Diaz-Michelena M. Small magnetic sensors for space applications. Sensors, 2009, 9(4): 2271–2288
[5]Archer M O, Horbury T S, Brown P, et al. The MAGIC of CINEMA: first in-flight science results from a miniaturised anisotropic magnetoresistive mag-netometer. Annales Geophysicae, 2015, 33(6): 725–735
[6]Brown P, Whiteside B J, Beek T, et al. Space mag-netometer based on an anisotropic magnetoresistive hybrid sensor. Review of Scientific Instruments, 2014, 85(12): 125117
[7]林继鹏, 王君, 凌振宝, 等. HMC1001 型磁阻式传感器及应用. 传感器技术, 2002, 21(3): 51–52
[8]陈凯, 秦会斌. 基于 HMC1001 的铁磁金属检测系统设计. 传感器与微系统, 2018, 37(4): 92–93
[9]安义岩, 田慕琴, 宋建成. 基于 HMC1001 的移频信号检测仪的开发. 煤炭技术, 2016, 35(2): 289–292
[10]葛丽丽, 任琼英, 赵华. 面向空间应用的高精度磁阻磁强计设计及性能测试. 航天器环境工程, 2017, 34(2): 166–170
[11]刘斯, 曹大平. 基于球形反馈线圈的三轴磁通门磁强计. 仪器仪表学报, 2010, 31(10): 2322–2327
[12]Liu Y X, Li X S, Zhang X J, et al. Novel calibration algorithm for a three-axis strapdown magnetometer. Sensors, 2014, 14(5): 8485–8504
[13]Schulz L, Heinisch P, Richter I, et al. Calibration of off-the-shelf anisotropic magnetoresistance magneto-meters. Sensors, 2019, 19(8): 1850–1867
[14]Springmann J C, Cutler J. Attitude-independent mag-netometer calibration with time-varying bias. Jour- nal of Guidance Control and Dynamics, 2012, 35(4): 1080–1088
[15]Fang J, Sun H, Cao J, et al. A novel calibration method of magnetic compass based on ellipsoid fit-ting. IEEE Transactions on Instrumentation and Mea-surement, 2011, 60(6): 2053–2061
[16]Liu Y X, Li X S, Zhang X J, et al. Novel calibration algorithm for a three-axis strapdown magnetometer. Sensors, 2014, 14(5): 8485–8504
[17]李勇, 刘文怡, 李杰, 等.基于椭球拟合的三轴磁传感器误差补偿方法. 传感技术学报, 2012, 5(7): 917–920
Vector Magnetometer for Space Applications Based on a Magnetoresistance
Abstract A low-resource anisotropic magnetoresistance-based vector magnetometer for space science applica-tions is presented. The proposed vector magnetometer can detect magnetic fields in a range of ±65000 nT, has a –3 dB bandwidth of DC to 10 Hz, and a noise power spectral density of ≤0.2 nT/Hz1/2@1 Hz. Furthermore, the device has a non-linearity error of ≤3.6‱ over the entire range and non-orthogonality error of ≤1.2‱. The vector magnetometer was equip on a Chinese Feng-Yun meteorological satellite (FY-3E) whose orbit was a sun synchronous orbit. The first in-flight science results show that the sensor can detect transient physical signals with amplitudes of 20–60 nT.
Key words low-resource magnetoresistance sensor; vector magnetometer; space science applications