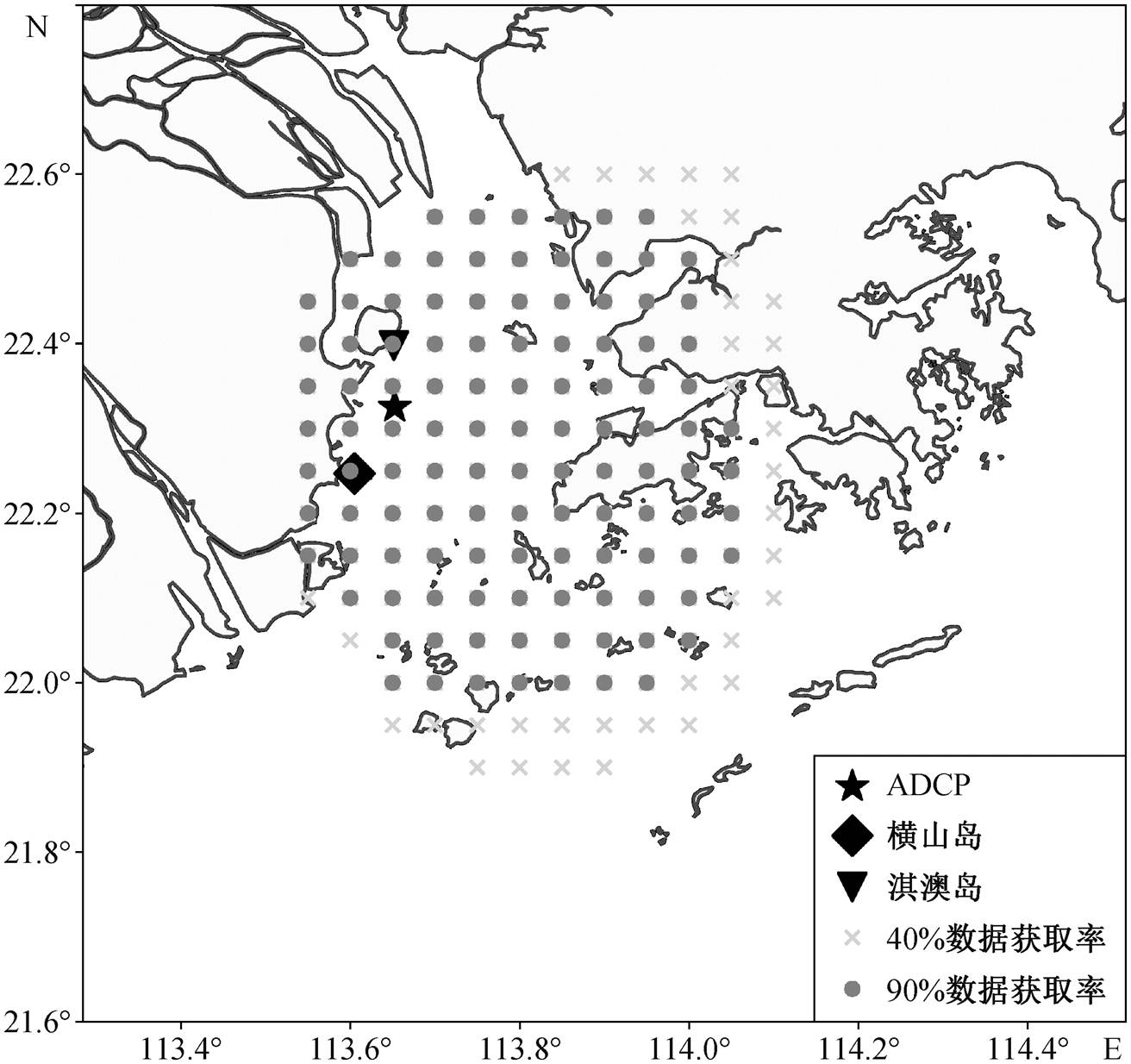
图1 雷达观测范围
Fig. 1 Radar observation range
doi: 10.13209/j.0479-8023.2023.021
广东省重点领域研发计划(2020B1111020003)、国家自然科学基金(41976007)和南方海洋科学与工程广东省实验室(珠海)自主科研项目(SML2020SP009)资助
收稿日期: 2022–05–31;
修回日期: 2022–07–08
北京大学学报(自然科学版) 第59卷 第4期 2023年7月
Acta Scientiarum Naturalium Universitatis Pekinensis, Vol. 59, No. 4 (July 2023)
摘要 为了验证一种使得 OSMAR-S 高频地波雷达的发射天线和接收天线一体化的天线系统的可行性, 于2021 年 11 月 25 日至 12 月 1 日在珠江口内进行雷达观测与声学多普勒流速剖面仪(ADCP)现场观测海流时间序列比测实验。结果表明, 雷达与 ADCP 的观测结果具有高度一致性, 相关系数达到 0.916。通过调和分析等方法得到的主要分潮(M2 和 K1)振幅大小与随时间变化趋势高度吻合。实验结果证明, 在具有占地面积小、成本低以及方便海边架设等优点的基础上, 该收发共用天线系统对海流的观测结果有很高的精度。
关键词 海洋环境监测; 高频地波雷达; 单极子交叉环; 调和分析; 旋转能量谱分析
为了开发海洋资源, 需要详细地了解海洋的动力学参数(如风速、浪高、潮汐以及流速和流向等)并实时观测[1–4]。海洋表面动力学参数的传统测量方法是在海洋里设置浮标, 但一个浮标只能观测一个点的相关参数, 且造价昂贵, 高达几十万[5–6]。高频地波雷达利用电磁波的后向散射原理, 可以测量一个海平面(包括几百平方公里海域)的海洋动力学参数[7–10]。
OSMAR-S 便携式高频地波雷达是武汉大学自主研发的单极子交叉环雷达, 具有占用场地小、架设容易以及成本低等优点, 其天线系统包括发射天线和接收天线, 发射天线采用单极子天线, 接收天线采用单极子交叉环天线。为了让天线方向图不受周围环境的影响, 也不受天线之间的相互影响, 上述天线系统要求一个较为开阔的空间, 其发射天线和接收天线需要相互距离 50m 左右来架设, 这在海边很难实现。因此, 设计一个收发共用的天线很有必要。
基于上述背景, 我们设计一种用于地波雷达的收发共用天线系统。本文介绍该系统天线体的基本结构、系统的控制信号及控制电路以及主要技术参数等, 并通过对比收发共用天线地波雷达与声学多普勒流速剖面仪(Acoustic Doppler Current Profiler, ADCP)的现场观测结果, 证明收发共用天线系统的性能及可靠性。
本文实验采用的雷达为由两架 25MHz 频段的单极子交叉环收发共用天线组成的雷达系统, 分别位于珠江口西侧的横山岛和淇澳岛。雷达数据的观测时间为 2021 年 11 月 25 日至 12 月 2 日, 每一场雷达数据的获取时间为 20 分钟。预处理时, 将海流数据分解为东西方向和南北方向的 U, V 分量, 并逐小时进行平均, 形成小时分辨率的数据, 最后插值到ADCP 所在位置。从图 1 中 40%数据获取率和 90%数据获取率的范围, 可见该雷达在珠江口内的观测具有较高的数据质量。
本研究采用的 ADCP 位于珠江口西侧珠海附近(113.652°E, 22.325°N), 水深约 6m, 位于雷达数据获取率 90%的区域。ADCP 的观测时间为 11 月 24日至 12 月 1 日, 每 10 分钟读取一项数据, 在预处理时降为逐小时数据。ADCP 观测数据共 25 层, 每层的深度为 0.5m, 第一层深 1.62m。为减少海表面船只等因素干扰, 本研究选用第二层数据与雷达进行对比。
首先, 分析观测站点海流 U, V 分量的速度以及海流整体运动状态。通过平均偏差(mean bias, MB)诊断雷达与 ADCP 观测数据之间的平均偏差; 通过相关系数(Pearson correlation coefficient, PCC)判断二者之间的相关性, 并且进行显著性检验; 通过均方根误差(root mean squared error, RMSE)分析二者之间的绝对差异; 通过 Willmott Skill (WS)指数[11]诊断两种观测结果的一致性。上述指标的计算公式如下:
图1 雷达观测范围
Fig. 1 Radar observation range

其中, R 和 A 分别是雷达和 ADCP 的时间序列数据, σR 和 σA 是二者的标准差。对比 U, V 分量的统计学指标时, 通过该分量的极差(Range)进行标准化, 如MB/Range 和 RMSE/Range 分别为标准化的 MB 和RMSE。
通过最小二乘法, 分别拟合流速 U, V 分量的回归方程, 以此分析雷达相对于 ADCP 的观测误差; 对流速的 U, V 分量做 EOF 分解, 得到最大方差的方向, 以 EOF1 为长轴, EOF2 为短轴, 画出 EOF 椭圆, 代表观测期间海流的整体运动特征。
随后, 通过 T-tide 程序对流速和流向的时间序列进行调和分析, 对比两个方向的分潮, 并通过振幅和位相绘制主要分潮的潮汐椭圆图。然后, 通过小波变换, 分析不同频率信号随时间的变化, 进而分析潮差的时间变化。最后, 通过旋转谱, 分析海流矢量的旋转方向及周期。
1.4地波雷达反演海流流程
对于雷达接收到的回波数据, 通过双傅里叶变换得到距离多普勒谱, 并进行通道数据有效性检查、干扰抑制处理及通道校正等算法处理, 确保处理数据的有效性和天线通道的方向响应保持理想特性。通过逐距离元数据谱分析、一阶谱分离以及基于 Music 算法的方位估计等步骤, 提取多普勒谱在各距离和各方向的一阶峰值, 并通过一阶峰的多普勒频移, 计算海流的径向流速。最后, 通过径向速度合成算法得到矢量流速。
本文设计的收发共用天线系统包括发射天线和接收天线两部分, 其构成如图 2 所示。白色玻璃钢罩里面装有交叉环接收天线, 由两组互相垂直的绕有线圈的磁棒组成, 是有源有方向的天线。顶部1.5m 左右的金属鞭与玻璃钢罩中心的铜棒相连, 构成单极子天线, 因此相当于有 3 根独立的天线, 对应接收机的3个通道。
发射天线是一条根据工作频率和发射功率设计的垂直极化的鞭状天线, 长度由发射信号的波长 λ决定, 为 λ/4。接收天线下部由一根铜棒与发射天线相连, 并与发射天线共用一根 4m 长的高强度不锈钢管支架和基座。铜棒连同顶部的金属鞭构成一条完整的单极子天线, 其总长度为 λ/4。
此外, 为了解决发射时的辐射信号对接收天线的影响, 在环天线的电路板前端增加两个 60dB 的受控电子开关, 后端加了一个限幅电路, 从而使两条环天线在发射期间的输出小于 0dBm, 不会造成接收机的堵塞。为了减小接收电缆对发射天线方向图的影响, 3 根信号电缆和一根控制电缆均接入不锈钢管内部。
采用收发共站的体制将接收天线和发射天线合在一起后, 需要解决是发射信号对接收机的直接干扰问题。控制系统框图如图 3(a)所示, 当发射机的开关 T.S 接通时, RF 发射的射频信号与天线 A 连接, 向空中辐射信号, 此时接收机的开关 R.S 应该是断开的, 从理论上讲, 发射的信号应该不会进入接收机。当接收机的开关 R.S 接通, 且发射机的开关T.S 断开时, 接收机 R 与天线接通, 回波信号进入接收机, 接收机对收到的回波信号进行处理。
图 3(b)中, 接收机 TB 脉冲的上升沿比发射机TP 脉冲的下降沿滞后 10~20μs, 主要作用是抑制延迟的发射信号RF, 即地波信号。
正常工作时, TP 接入发射机及天线控制开关T.S, 且 T.S 处于接通状态, 200W 的射频脉冲有效地进入共用天线 A; TB 接入接收机, 接收开关 R.S有效地断开, 保证发射期间发射的信号不窜入接收机。在接收期间, T.S 是断开的, 回波信号不会分流到发射机, 此时 R.S 是接通的, 回波信号可以畅通无阻地进入接收机, 由接收机对回波信号进行处理。在实际电路中, T.S 是一个大电流 PN 管, 可以让大功率的发射电流通过, 使开关迅速接通, 插入损耗小于 0.1dB; R.S 是一个高反压 PN 二极管, 可以承受 240V 高的脉冲电压来阻止发射信号通过, 使开关断开。
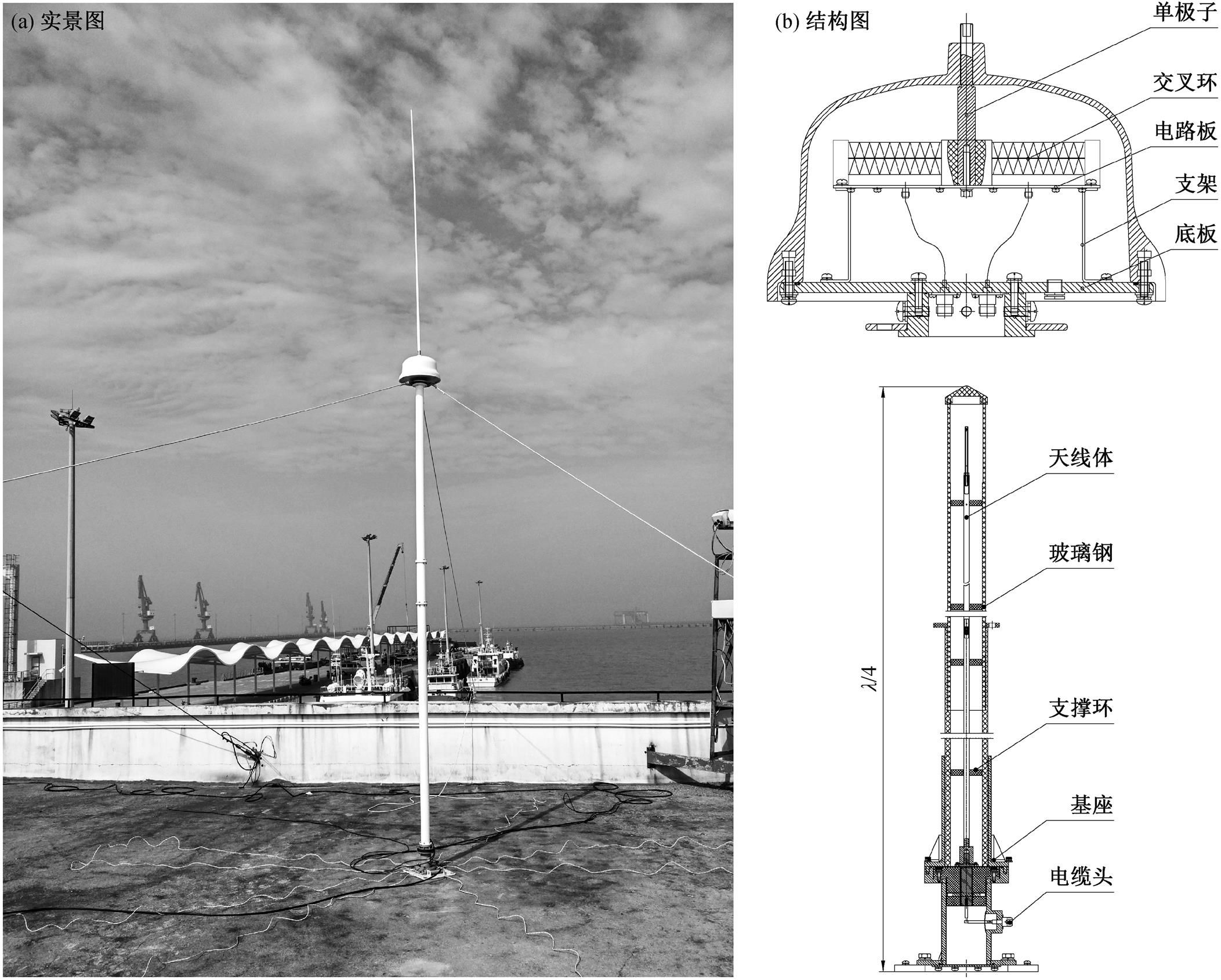
图2 发射天线和接收天线的结构
Fig. 2 Structure of transmitting and receiving antenna
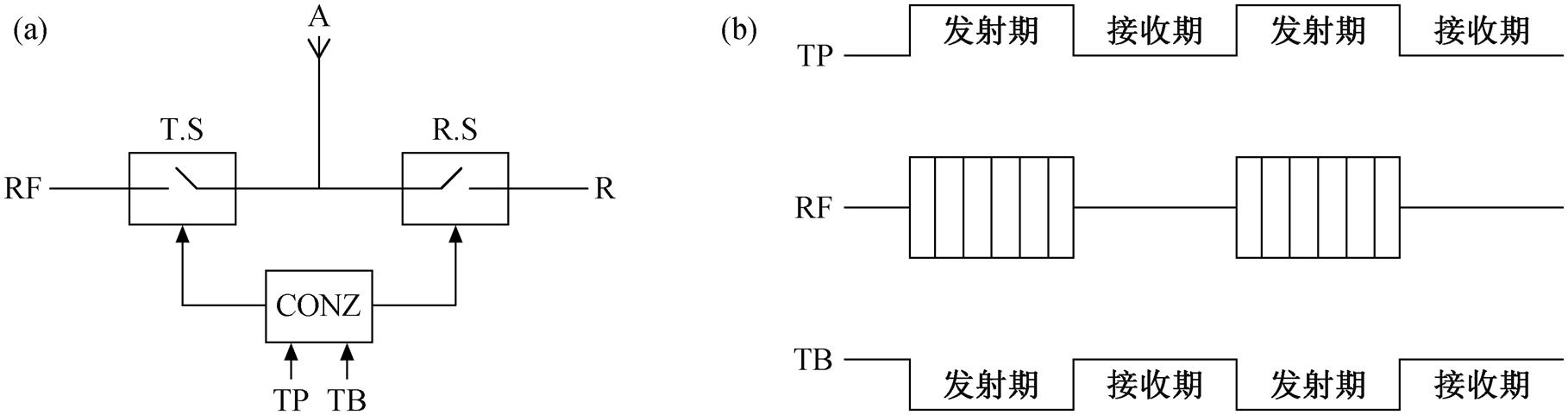
(a)控制系统框图, RF 和 R 分别为发射器和接收器发射和接收到的信号, A 为二者共用的发射天线, T.S 和 R.S 分别为发射机和接收机的开关, CONZ 为控制系统, TP 和 TB 分别为 T.S 和 R.S 的控制信号, 其幅度都是 TTL 电平; (b)控制信号波形图, TP 和 TB 分别为发射机和接收机的控制信号波形图, RF 是发射信号的波形图, 方框内的信号是线性调频连续波信号
图3 控制系统和信号
Fig. 3 Control systems and signals
将雷达和 ADCP 观测获得的矢量流速分解为东西方向的 U 分量和南北方向的 V 分量进行对比, 可以发现, 相比于 U 分量, 雷达观测数据的 V 分量与ADCP 观测数据具有更高的一致性(图 4(a)和(b))。雷达和 ADCP 数据 U, V 分量的 MB 分别为−0.077 和−0.094m/s, RMSE 分别为 0.118 和 0.168m/s, 通过U 分量和 V 分量的极差(分别为 1.49 和 0.65 m/s)进行标准化后, V 分量的标准化 MB 和 RMSE 都比 U 分量小, 且 U, V 分量的 PCC 分别为 0.789 和 0.916(p< 0.005), WS 分别为 0.816 和 0.936, 可见雷达对海流U 分量的观测性能弱于 V 分量。
如图 4(c)和(d)所示, 以雷达观测值为自变量, ADCP 观测值为因变量, 通过最小二乘法进行回归分析, 得到 U, V 分量的斜率分别为 0.915 和 0.975, 截距分别为 0.067 和 0.089m/s, R2 分别为 0.632 和0.839, 表明雷达与 ADCP 观测到的海流具有较高的吻合度。从整体上看, 雷达观测得到的西向和南向流速偏大, 东向和北向流速偏小。
从图 4(a)和(b)可以发现, 流速的 U 分量与 V 分量有较大的差异。一方面, 可能由于两个雷达与ADCP 连线的夹角较大, 且分别位于 ADCP 的北侧和南偏东侧, 导致径向速度合成时产生较大的误差;另一方面, 我们从图 4(c)可以看出, 当流速的绝对值小于 0.2m/s 时, 误差较大, 与 Liu 等[12]的研究结论相符。
通过对流速的 U, V 分量做 EOF 分析, 得到两个相互正交且方差最大的方向(模态)以及该方向的方差(重要性), 并分别以两个模态的重要性为长轴和短轴, 绘制 EOF 椭圆(图 4(e))。可以看出, 雷达与ADCP 观测数据的模态方向和方差几乎相同; 相对于 ADCP 观测数据, 雷达观测数据的第一模态较小。该观测点海流的流速变化主要受潮汐影响, 因此第一模态大小的差异可能是由对潮汐分量的观测误差引起。通过对比平均流速和流向的 ADCP 和雷达观测观测结果可以发现, 雷达观测得到的西向和南向流速偏大, 且 U 分量比 V 分量误差大, 因此平均流速比 ADCP 观测值偏大, 且方向偏西(图 4(e))。
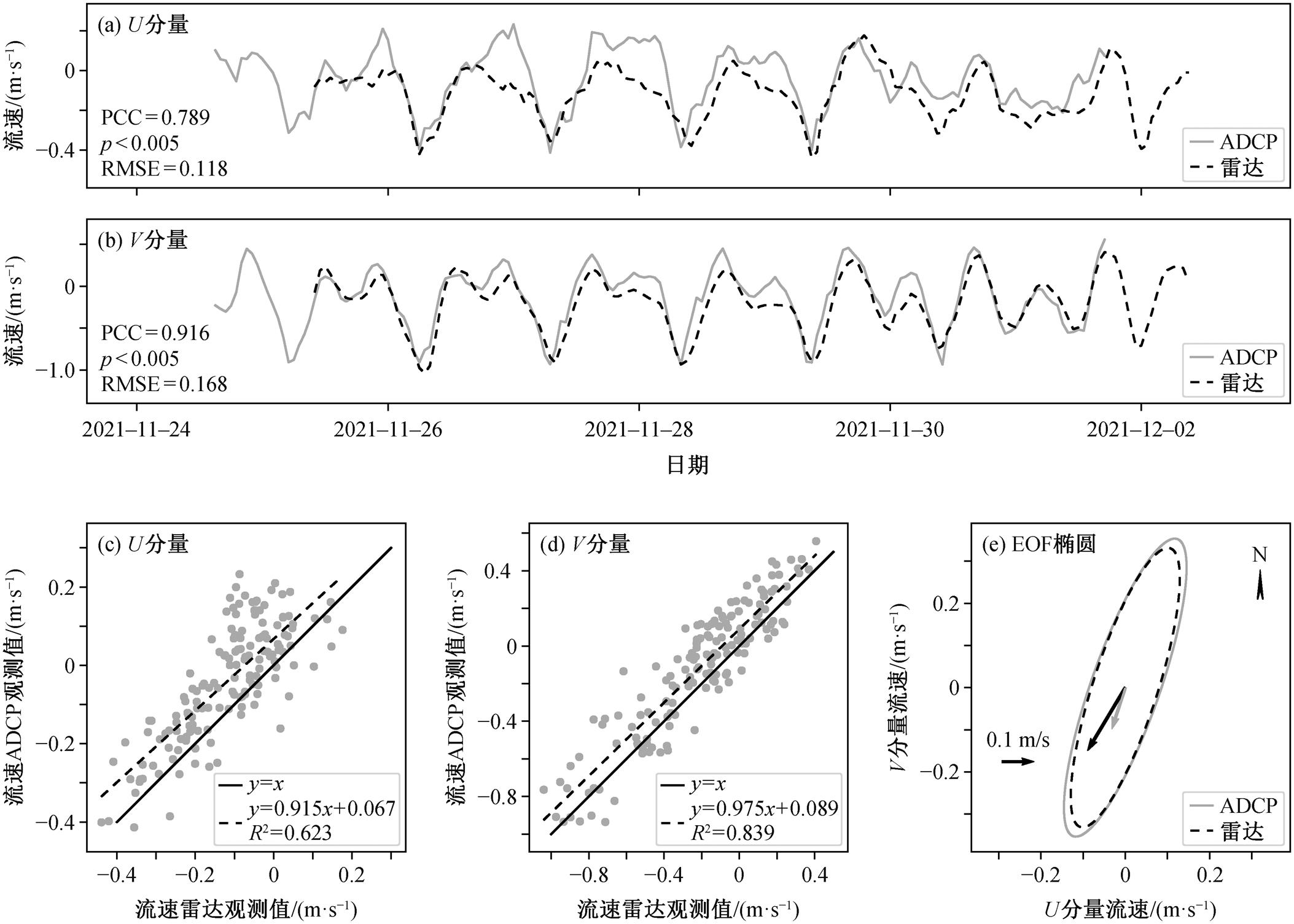
图4 ADCP 与雷达流速观测结果对比及 EOF 椭圆
Fig. 4 Comparison of current components and EOF ellipses of ADCP and radar observations
通过 T-tide 进行调和分析, 得到该观测点的主要分潮为 K1 和 M2, 具体参数如表 1 所示。可见雷达与 ADCP 观测得到的半日潮半长轴分别为 0.3433和 0.3440m/s, 全日潮半长轴分别为 0.2986 和 0.3476 m/s, 并且二者相位差较小, 因此雷达观测结果与ADCP 具有较好的一致性。雷达观测数据中, K1 潮分量的振幅偏小, 相位较为准确; M2 潮分量的振幅较为准确, 但相位有所偏差。
通过对图 5(a)和(b)中原始速度分量进行调和分析, 得到图 5(c)和(d)中 U, V 分量的潮汐时间序列。雷达和 ADCP 观测数据中, 两个分量的相关系数都超过 0.96, 且通过 99%的显著性检验。U 分量的潮汐振幅较小, 最大流速为 0.2m/s; V分量的潮汐振幅较大, 最大流速可达 0.6m/s。从图 5(c)和(d)可以看出, 误差较大的位置出现在每天小潮时, 即流速较小时。
图 5(e)和(f)为 K1 和 M2 分潮的潮汐椭圆和相位, 结合表 1 中数据可知, 雷达观测数据中 K1 分潮的长轴和短轴分别比 ADCP 观测数据小 0.05 和 0.02 m/s, 而 M2 分潮的长轴和短轴与 ADCP 观测数据较为接近。但是, 雷达观测数据中 M2 分潮的相位与雷达观测数据相差约 8°, 比 K1 分潮的误差略大。因此, 图 4(e)中 EOF 椭圆第一模态的误差可能是由雷达观测数据中全日潮分量 K1 的误差导致。整体来说, 地波雷达在该观测点的潮汐观测结果具有较高的准确性。
通过 T-tide 对 U 和 V 分量的时间序列进行调和分析, 诊断出该观测点的主要分潮为 K1 和 M2。图6(a1)和(b1)显示, 全日潮和半日潮的流速峰值不是固定的, 而 T-tide 只能分析平稳潮, 无法解释观测期间日潮差随时间的变化。因此, 我们通过小波分析的方法, 分析不同频率的能量随时间的变化。
通过小波变换, 对复数形式的流速(U+Vi)进行分析。在 11 月 25 日至 12 月 1 日的 7 天时间中, 两种观测数据都在 12 小时和 24 小时周期附近显示极为显著的信号(图 6(a2)和(b2)), 与通过调和分析得到的主要分潮 M2 和 K1 的周期吻合。图 6(a3)和图(b3)中两种主要分潮 M2 和 K1 的信号强度在 7 天内有不同的变化趋势。半日潮信号的强度在前期略微下降, 然后迅速上升, 于 12 月 1 日凌晨左右到达峰值, 然后下降; 全日潮信号的强度前期较高, 后期下降。
半日潮的潮差变化与月相有关, 朔月和望月之后的两三天潮差最大, 称为大潮, 上弦月和下弦月之后潮差最小, 称为小潮。月亮赤纬角的不同会引起日潮差的变化, 月亮赤纬角最大时, 潮汐周日不等现象最显著, 即回归潮; 月球位于赤道附近时, 一日中两次潮差接近, 即分点潮。因此, 该区域非正规半日潮的潮差变化与月相和月亮赤纬角的变化都有密切联系。在观测期间, 月亮赤纬角从 11 月25 号的 25°40′下降到 11 月 30 号的 0°左右, 最后在12 月 2 号变为−11°54′, 月相则从 11 月 27 号的下弦月向之后的朔月转变。因此, 半日潮的能量在前期下降, 随后同时受赤纬角减小和月相转变的影响, 能量增大, 而全日潮能量下降是受赤纬角变化的影响, 因此可以在流速时间序列中看到大潮与小潮的日潮差在后期有所减小。
对雷达和 ADCP 的观测数据进行旋转谱分析, 结果如图 7 所示, 可以得知海流矢量的旋转方向为顺时针。海流顺时针(图 7(a))和逆时针(图 7(b))旋转的能量谱在 24 小时(D 点)和 12 小时(SD 点)周期附近都有明显的量级相当的峰值, 与调和分析的结果一致。惯性震荡周期(IP 点)附近没有出现峰值, 表明此时离岸较近, 受科氏力的影响不明显。雷达与ADCP 观测数据的峰值大小具有较好的一致性, 但在峰值附近区域, 雷达测得的能量略高于 ADCP。对比图 7(a)与(b)可见, 顺时针旋转的能量谱峰值明显高于逆时针旋转的能量谱, 因此全日潮和半日潮周期的海流都呈顺时针方向旋转, 这也与调和分析的结果一致。
表1 潮流椭圆的调和常数
Table 1 Harmonic constants of current ellipse

观测方法分潮频率/cph潮流椭圆的半长轴/(m·s−1)潮流椭圆的半短轴/(m·s−1)相位/(°) 雷达K10.0417810.2986−0.0241112.20 M20.0805110.3433−0.0311114.67 ADCPK10.0417810.3476−0.0443118.38 M20.0805110.3440−0.0260 96.88

(a)和(b)海流U, V分量时间序列; (c)和(d)海流U, V分量潮流时间序列; (e)和(f) K1 和 M1 分潮的潮汐椭圆和相位。黑色虚线为雷达观测数据, 灰色实线为ADCP观测数据
图5 ADCP和雷达观测数据调和分析结果及调和椭圆
Fig. 5 Harmonic analysis and harmonic ellipses of ADCP and radar observations
本文提出一种用于海洋探测的地波雷达收发共用天线, 把在海边架设的两根天线合并为一根, 既降低了雷达系统的成本, 也使地波雷达建站更便捷。为解决发射信号对接收机的影响, 在环天线的电路板前端增加两个电子开关, 后端增加一个限幅电路, 从而使两个环天线在发射天线发射信号期间不会向接收机传入信号。此外, 通过分别在发射控制电路和接收控制电路应用大电流和高反压参数的PN 二极管, 满足发射开关和接收开关的不同控制需求, 巧妙地实现收发共用控制电路设计。
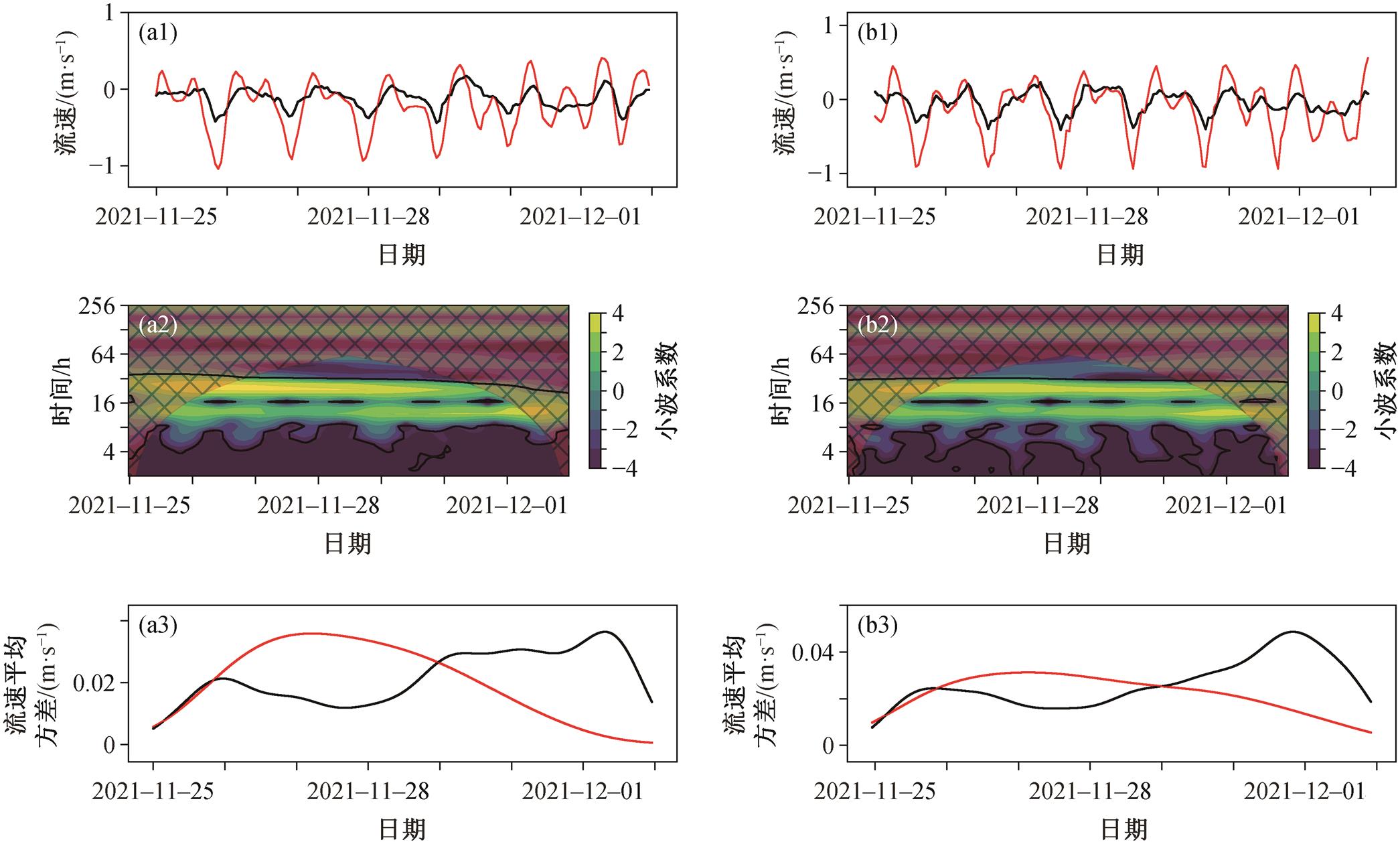
(a1)和(b1)分别为雷达和 ADCP 观测数据 U, V 分量的时间序列, 黑色和红色曲线分别为 U 分量和 V 分量; (a2)和(b2)分别为雷达和ADCP 观测数据复数形式的流速(U+Vi)时间序列的小波分析谱, 交叉线部分为未通过显著性检验的信号; (a3)和(b3)分别展示雷达和 ADCP 观测数据中两个主要分潮 M2(黑色曲线)和 K1(红色曲线)的信号强度
图6 ADCP和雷达观测数据小波变换分析结果
Fig. 6 Wavelet transform analysis of ADCP and radar observations
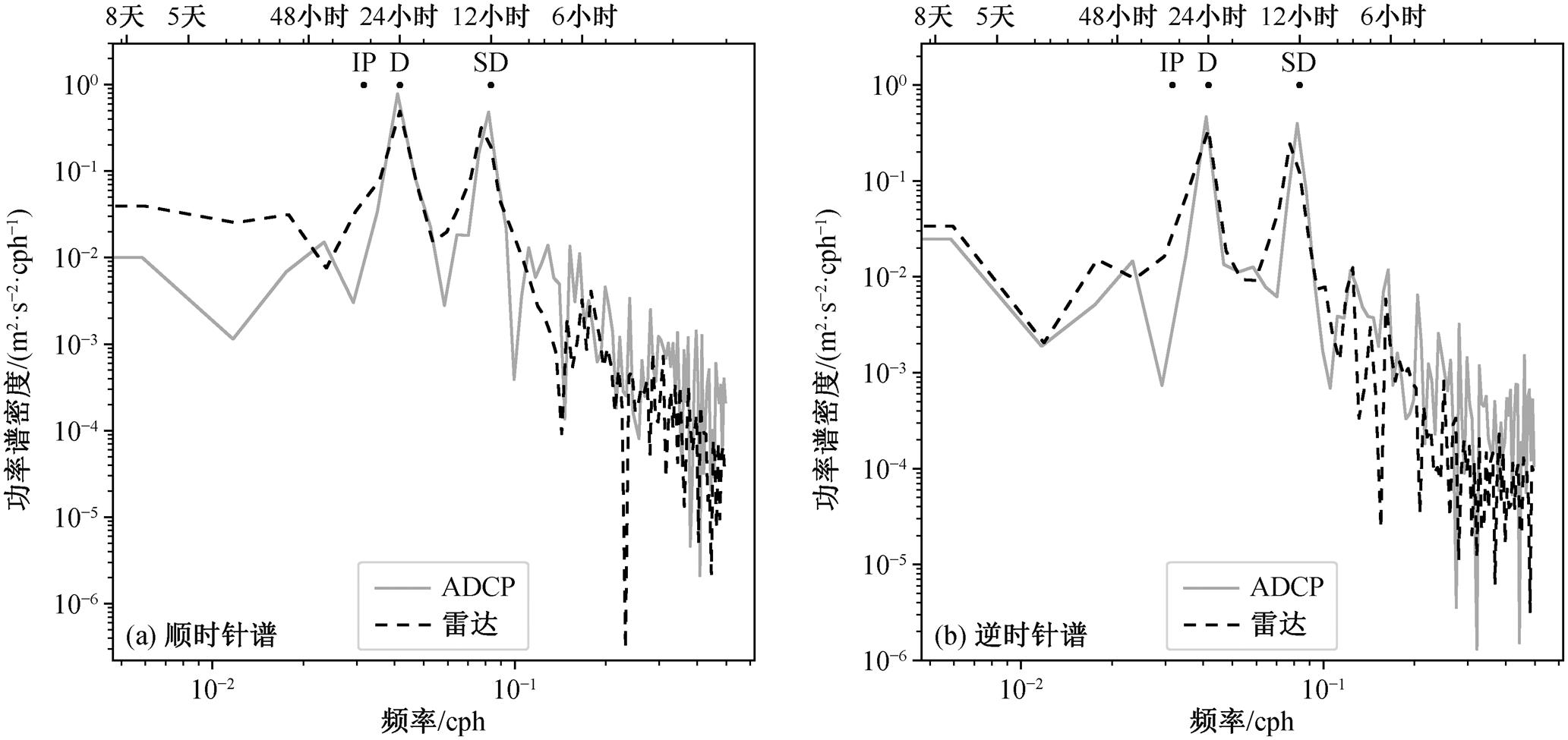
图7 ADCP和雷达观测数据旋转谱分析
Fig. 7 Rotary spectrum analysis of ADCP and radar observations
通过对比地波雷达观测与声学多普勒流速剖面仪(ADCP)现场观测的测试结果, 证明用收发共用天线代替收发分开的天线是可行的。通过对比雷达和 ADCP 观测获得的单点流速时间序列和整体运动状态, 证明二者有较好的一致性, 该收发共用天线雷达的性能与国际上同类型的 CODAR 雷达的观测结果[13–16]相当。通过调和分析和谱分析, 提取海表流速中的周期信号(即分潮的振幅和相位), 并分析其强度和随时间的变化趋势, 也证实了收发共用天线地波雷达观测结果的可靠性。通常雷达高精区在两个雷达站点连线夹角为 30°~120°的区域内, 但受海域条件的影响, 本次比测所用 ADCP 所在位置与两个雷达站点连线的夹角约为 145°, 虽然不在传统意义上的高精区内, 但仍然取得较好的比测结果。因此, 可以肯定的是, 在雷达高精区的观测精度会明显好于本次比测实验, 并且高精区以外的数据仍然有很高的价值。
本次比测有助于收发共用天线地波雷达的架设和推广。由于将收发天线合二为一, 雷达站址容易确定, 架设施工也更加方便, 并降低了成本。下一步的工作中, 一方面要从工艺上对天线的结构进行优化, 以便更好地适应海边的恶劣环境, 另一方面要通过更多的比测实验来发现反演算法中的不足, 进一步提高雷达观测数据的可靠性。
参考文献
[1]文必洋, 李艳, 侯义东, 等. 超高频雷达海洋表面流的探测结果与分析. 电波科学学报, 2016, 31(5): 941–947
[2]杨俊钢, 张杰, 王桂忠. 北极海域海面风场和海浪遥感观测能力分析. 海洋学报, 2018, 40(11): 105–115
[3]王国松, 王喜冬, 侯敏, 等. 基于观测和再分析数据的 LSTM 深度神经网络沿海风速预报应用研究. 海洋学报, 2020, 42(1): 67–77
[4]王波, 闫星魁, 徐宇柘, 等. 岸基 GNSS 反射信号的波浪多参数反演方法研究. 电波科学学报, 2019, 34(3): 315–321
[5]韩伟孝, 杨俊钢, 王际朝. 基于浮标数据的卫星雷达高度计海浪波高数据评价与校正. 海洋学报, 2016, 38(11): 73–89
[6]徐曦煜, 王振占, 叶沛, 等. GPS 浮标数据反演海浪谱的理论仿真与试验验证. 海洋学报, 2014, 36(7): 34–44
[7]丁锋, 李吉宁, 杨龙泉, 等. 高频天/地波雷达海面风向、洋流反演试验研究. 电波科学学报, 2016, 31 (4): 755–759
[8]文必洋, 石阳升, 杨静, 等. 多站高频地波雷达目标检测研究. 电波科学学报, 2015, 30(3): 535–541
[9]Zhang S S, Wen B Y, Zhou H. Analysis of the higher order bragg scatter in HF radar. Journal of Electro-magnetic Waves and Applications, 2013, 27(4): 507–517
[10]Zhou H, Wen B, Wu S. Ionospheric clutter suppres-sion in HFSWR using multilayer crossed-loop anten-nas. IEEE Geoscience and Remote Sensing Letters, 2014, 11(2): 429–433
[11]Willmott C, Robeson S, Matsuura K. A refined index of model performance. International Journal of Clima-tology, 2012, 32: doi: 10.1002/joc.2419
[12]Liu Y, Weisberg R H, Merz C R, et al. HF radar performance in a low-energy environment: codar sea-sonde experience on the west florida shelf. Journal of Atmospheric and Oceanic Technology, 2010, 27(10): 1689–1710
[13]Emery B, Washburn L, Harlan J. Evaluating radial current measurements from codar high-frequency ra-dars with moored current meters. Journal of Atmos-pheric and Oceanic Technology, 2004, 21: 1259–1271
[14]Kaplan D M, Largier J, Botsford L W. HF radar observations of surface circulation off bodega Bay (Northern California, USA). Journal of Geophysical Research: Oceans, 2005, 110(C10): doi: 10.1029/2005 JC002959
[15]Rubio A, Reverdin G, Fontán A, et al. Mapping near-inertial variability in the SE Bay of Biscay from HF radar data and two offshore moored buoys. Geophy-sical Research Letters, 2011, 38(19): doi: 10.1029/201 1GL048783
[16]Lorente P, Piedracoba S, Fanjul E A. Validation of high-frequency radar ocean surface current observa-tions in the NW of the Iberian Peninsula. Continental Shelf Research, 2015, 92: 1–15
Offshore Comparative Test for HF Ground Wave Radar Based on Integrated Monopole Cross Loop Transceiver Antenna
Abstract To verify the feasibility of an antenna system with integrated transmitting and receiving antennas for use on OSMAR-S high frequency radar, an experiment of radar observation with time series of sea currents observed by Acoustic Doppler Current Profiler (ADCP) in situ was conducted within the Pearl River Estuary from November 25 to December 1, 2021. The experimental results show that the radar and ADCP observations are in high agreement, with correlation coefficients as high as 0.916. The magnitudes and changes with time of the amplitudes of the main sub-tides (M2 and K1) obtained by the reconciliation analysis and other methods are in high agreement. The experiment indicates that the transceiver antenna system, on the basis of its advantages of small footprint, low cost and convenience to set up on the seashore, still has high accuracy for in situ current observations.
Key words marine environment monitoring; high frequency ground wave radar; monopole cross loop; harmonic analysis; rotary power spectrum analysis