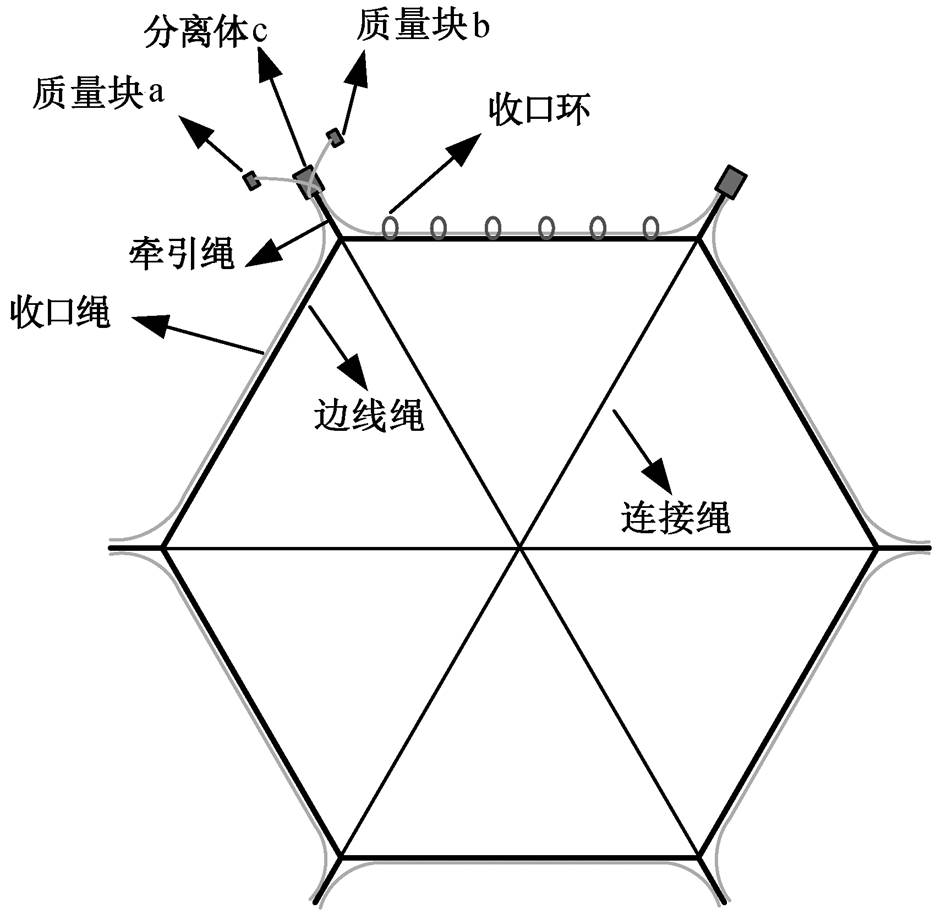
图1 收口系统组成示意图
Fig. 1 Composition of the closure system
北京大学学报(自然科学版) 第59卷 第3期 2023年5月
Acta Scientiarum Naturalium Universitatis Pekinensis, Vol. 59, No. 3 (May 2023)
doi: 10.13209/j.0479-8023.2023.014
中国航天科技集团有限公司空间结构与机构技术实验室开放课题和国家自然科学基金(11972055)资助
收稿日期: 2022–04–22;
修回日期: 2022–05–17
摘要 针对飞网捕获系统中大量非光滑接触以及刚柔耦合造成的动力学建模困难问题, 提出一个简化模型。该模型将收口绳索与收口环和分离体之间的接触视为滑移关节, 并采用约束方法开展动力学研究。考虑到滑移关节的碰撞, 引入接触刚度, 建立滑移关节的接触动力学方程。利用绝对节点坐标法描述绳索单元, 采用虚功原理建立绳索单元动力学模型; 对于分离体等刚体, 采用四元数描述, 建立刚体含约束动力学方程。对收口系统的收口过程建模仿真, 得到绳索和牵引质量块的运动规律, 并对比不同收口环数目下的收口时间和收口程度。研究结果表明, 收口环的数目增加可以使边线绳收缩得更加紧凑, 但较多的收口环会延长收口时间, 降低收口效率。
关键词 飞网捕获; 受约束柔索; 滑移关节; 绝对节点坐标法
在航天工程中, 采用飞网捕获关键目标逐渐成为研究热点[1]。如图 1 所示, 空间飞网捕获机构主要包括多边形绳网主体和收口装置两部分[2]。绳网由边线绳和连接绳组成, 收口装置由收口绳、收口环和分离体组成。收口环与边线绳固连, 收口绳穿过收口环和具有止拉作用的分离体, 两端固定在牵引质量块上。初始条件下, 牵引质量块与分离体连接成一个整体, 固定在多边形的顶角。分离时, 分离体在火工装置作用下一分为三, 两个牵引质量块被弹射出去, 牵引收口绳的两端, 从而实现收口功能。在收口阶段存在复杂的动力学行为[3], 特别是收口绳与收口环和具有止拉功能的分离体之间的非光滑滑移接触, 为动力学模型的建立带来困难。
图1 收口系统组成示意图
Fig. 1 Composition of the closure system
关于沿着柔性绳索或柔性梁移动的滑移关节的研究有以下两种方法。
一种方法是将其考虑为柔索与刚性面的接触, 采用力–位移模型, 通过对柔性绳梁与滑移关节的接触检测, 确定接触位置和接触力大小, 得到柔性绳梁和滑移关节的运动状态。Tang 等[4]针对穿过刚性圆孔的柔性梁, 进行含大间隙的滑移关节建模, 并应用到太阳能帆板展开的动力学仿真中。但是该方法需要实时检测滑移关节与柔性绳梁之间的接触点, 计算效率低, 且计算稳定性较差。
另一种方法是采用约束的观点进行建模[5–6]。Hwang 等[7]在模态坐标下导出滑移关节的约束方程。在模态坐标系, 弹性体的边界条件至关重要, 但由于多体系统的运动耦合, 绳索的边界条件会随滑移关节的相对运动而不断变化, 因此该方法采用的与时间相关的变形模态很难对滑动的动态特性进行精确的模拟。Sugiyama 等[8]采用绝对节点坐标法[9], 引入绳索的物质参数, 给出滑移关节的约束方程, 并将刚体约束中关于球铰、圆柱铰以及棱柱铰的概念应用到柔性滑移关节中, 分别建立球铰关节、圆柱关节以及棱柱关节的约束方程。
本文采用约束的方法来描述滑移关节接触问题, 将重点接触约束等效为滑移关节的球铰和圆柱铰约束, 与传统的接触检测方法相比, 不需要考虑实时检测接触点的问题, 计算效率高, 可为飞网捕获动力学建模提供理论支撑。
本文对收口绳索与收口环和分离体之间的接触作以下假设。
1)将该接触视为滑移关节: 将边线绳与收口绳之间视为具有沿收口绳滑移的球铰约束(图 2(a)); 收口绳与分离体之间具有沿收口绳滑移的圆柱铰约束(图 2(b))。
2)忽略收口绳的扭转, 忽略收口环和分离体的质量。
3)忽略接触过程中的摩擦因素。
本文给出收口系统的简化模型, 如图 1 所示。在简化模型中, 为了方便收口绳的单元划分, 去掉牵引绳, 将边线绳的端点直接约束在收口绳上; 考虑到绳网的拓扑构型比较复杂, 将其简化为绳网中心点 O分别与边线绳端点相连的连接绳。本文中忽略接触中的摩擦和止拉作用。
为了实现收口绳在收口环以及分离体内的滑移运动, 本文将收口环和分离体与收口绳之间的运动关系视为滑移关节约束, 并且建立滑移关节的约束方程。
将收口环对收口绳的约束简化为球铰类型的滑移关节, 约束方程可表示为
 (1)
(1)
其中,  为单元内一点的位置矢量, s 表示此单元的局部物质坐标。
为单元内一点的位置矢量, s 表示此单元的局部物质坐标。 是物体上约束点 C 在全局坐标系中的位置, 可以表达为
是物体上约束点 C 在全局坐标系中的位置, 可以表达为
 (2)
(2)
其中, 为物体随体坐标系原点的位置矢量,
为物体随体坐标系原点的位置矢量, 是物体随体坐标系的方向余弦矩阵,
是物体随体坐标系的方向余弦矩阵,  是约束点 C在随体坐标系中的矢径。
是约束点 C在随体坐标系中的矢径。
可将分离体 c 对收口绳的约束视为圆柱铰类型的滑移关节。在球铰滑移关节约束的基础上, 圆柱铰滑移关节还约束了两个弯曲方向的相对转动, 即
 (3)
(3)
其中, 和
和 为定义在分离体 c 上的随体坐标系的坐标轴, 如图 2 所示。
为定义在分离体 c 上的随体坐标系的坐标轴, 如图 2 所示。
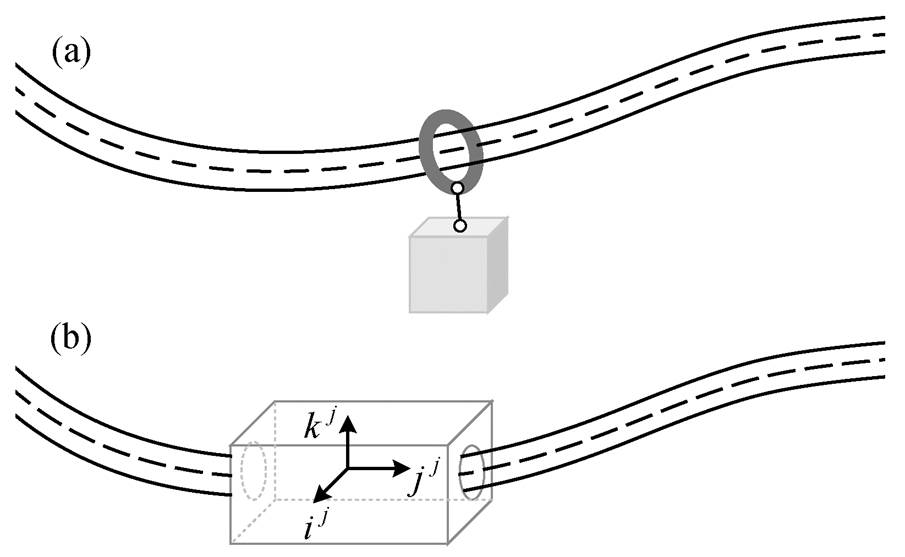
图2 绳索穿过收口环(a)与绳索穿过分离体(b)示意图
Fig. 2 Diagram of the rope through closure ring (a) and the rope through separator (b)
在收口系统中, 收口环固定在边线绳上, 且收口环的质量很小, 可忽略不计。因此, 本文直接在收口绳和边线绳上建立球铰滑移关节。将分离体 c 视为立方体, 并将立方体的中心视为收口绳和分离体 c滑移关节的约束位置。
采用绝对节点坐标法对绳索建模, 选取绳索单元节点位置矢量和斜率矢量为单元广义坐标
 , 采用 Hermite 插值, 得到单元内点的位置矢量:
, 采用 Hermite 插值, 得到单元内点的位置矢量:
 (4)
(4)
其中, Ne 为 Hermite 插值函数, 表达式为



将式(4)对时间求一阶和二阶导数, 可以分别得到单元内任意点的速度和加速度。根据虚功原理, 引入拉格朗日乘子, 可以得到对应的无约束单元动力学方程:
 (5)
(5)
式(5)中质量矩阵、广义外力和广义弹性力表达式分别为
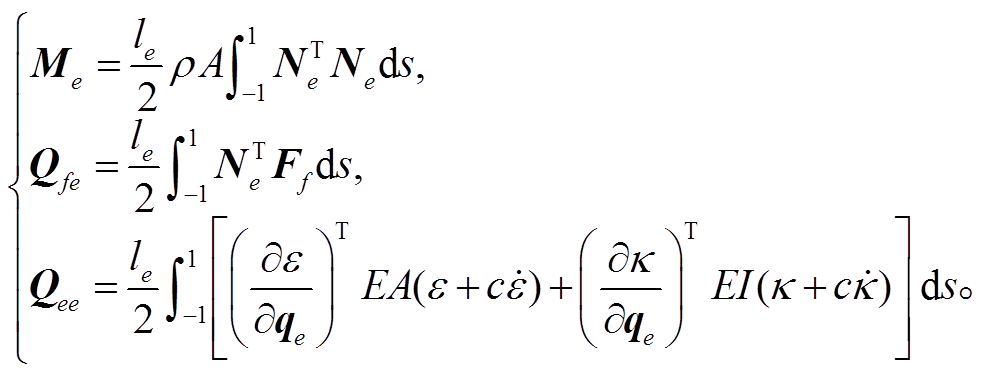 (6)
(6)
其中, ρ为绳索的密度, A 为绳索的横截面积, E为绳索的弹性模量, I 为绳索的截面惯性矩, c 为绳索的粘性阻尼系数, ε和 κ 分别为绳索的轴向正应变和曲率, Ff为外力。
通过组装单元的动力学方程, 可得绳索的动力学方程:
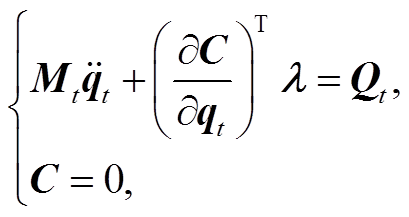 (7)
(7)
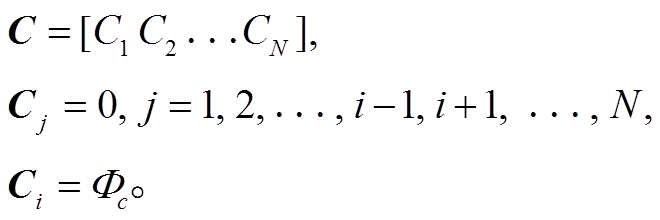
其中, Mt和 Qt分别表示绳索的整体质量矩阵和广义力向量,  表示滑动铰约束方程对应的约束乘子向量, 整体约束方程满足
表示滑动铰约束方程对应的约束乘子向量, 整体约束方程满足
收口系统中的分离体c和质量块等刚体在运动过程中的姿态变化, 可以采用欧拉四元数来描述。刚体的含约束动力学方程[10]为
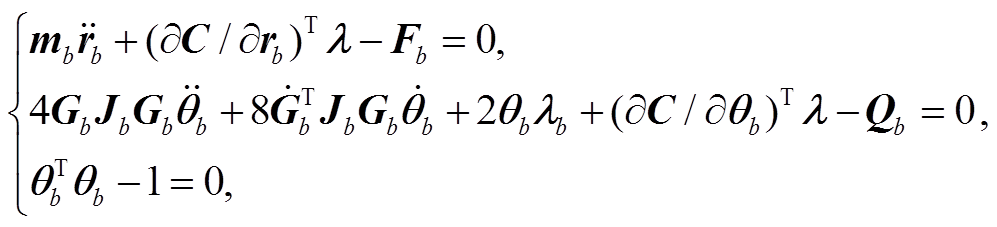 (8)
(8)
其中, rb是刚体质心的位置矢量, 是欧拉四元数, mb和 Jb分别是刚体的质量矩阵和惯量矩阵, Fb.和 Qb分别是广义力和广义力矩, Gb.是欧拉四元数组成的矩阵
是欧拉四元数, mb和 Jb分别是刚体的质量矩阵和惯量矩阵, Fb.和 Qb分别是广义力和广义力矩, Gb.是欧拉四元数组成的矩阵
联立式(7)和(8)即为系统整体的动力学微分方程。
如图 3 所示, 在收口过程中, 分离体 c 以及若干个收口环会在收口绳上滑动, 滑移关节之间会相互接触。
在柔性绳梁上的滑移关节不相互穿透的接触条件, 可用滑移关节在绳索上的物质坐标进行度量。我们以球铰滑移关节为例, 介绍滑移关节之间相互接触的动力学建模方法。
滑移关节在柔性绳梁弧长坐标系中的距离为
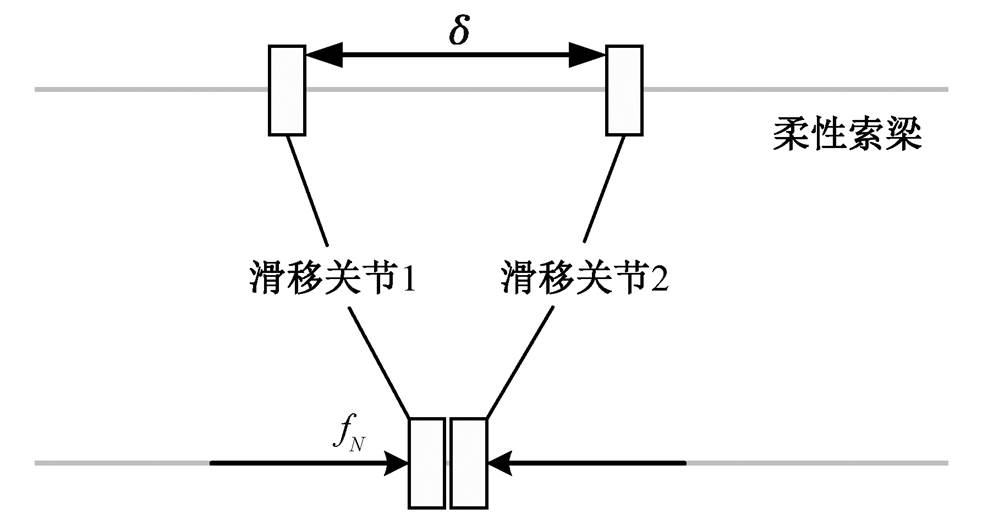
图3 滑移关节相互接触
Fig. 3 Intercontact of slip joints
 (9)
(9)
其中, i和 i+1 表示绳索上的滑移关节的编号, 且按物质坐标增大的方向进行编号; p表示滑移关节在绳索上的物质坐标。
接触条件表示为
 (10)
(10)
当滑移关节接触时, 接触力的大小为
 (11)
(11)
式中, K表示两个滑移关节之间的接触刚度。
对于编号为 i+1 的滑移关节, 接触力的作用方向为绳索的切线方向; 而对于编号为 i 的滑移关节, 接触力的作用方向为绳索切线方向的相反方向。在收口系统中, 收口环与边线绳固定, 且收口环的大小和质量可以忽略, 则可将收口绳与收口环以及收口环与边线绳之间的约束关系直接视为收口绳与边线绳之间的滑移关节约束, 那么滑移关节之间的接触力可以直接作用在边线绳上。i+1 号滑移关节的接触力所对应的边线绳的广义力为
 (12)
(12)
其中, Ne为边线绳上滑移关节所在单元的插值函数; Be为边线绳对应单元的布尔矩阵[11], 其作用是将单元节点广义坐标变换为整体广义坐标。
对分离体 c 来说, 滑移关节的接触力直接作用在分离体上, 我们用欧拉四元数来描述分离体的运动, 分离体 c 上接触点在全局坐标系中的位置为
 (13)
(13)
其中, rO为分离体 c 随体坐标系的原点, 一般位于分离体 c 质心位置; A 为随体坐标系的方向余弦矩阵; 为接触点在分离体 c 随体坐标系中的位置矢量, 由于本文将分离体 c 视为立方体滑块, 因此认为接触点在接触表面的中心位置。
为接触点在分离体 c 随体坐标系中的位置矢量, 由于本文将分离体 c 视为立方体滑块, 因此认为接触点在接触表面的中心位置。
分离体 c 的虚位移[4,12]表示为
 (14)
(14)
其中,  为的坐标方阵。
为的坐标方阵。
通过计算接触力在分离体 c 虚位移上的虚功, 可以得到接触力对分离体c的广义力:
 (15)
(15)
为了验证本文方法的有效性, 分析整个收口过程的动力学行为, 我们对整个收口系统的收口过程进行建模仿真。仿真过程中, 将边线绳的端点直接约束在收口绳上, 同时将中心点O的位置固定, 模拟绳网捕获物体过程中物体与绳网的相对运动。
收口绳、边线绳和连接绳均采用相同的材料和相同的几何形状, 绳索参数见表1。将收口绳均匀地划分为10个单元, 边线绳和连接绳均匀地划分为8个单元。牵引质量块的质量均为0.2kg, 初始速度为12 m/s, 方向垂直于绳网平面。
除边线绳两端点固定收口环外, 在边线绳弧长为 0.4 和 1.2m 的地方也布置与边线绳固定的收口环。收口环与边线绳之间的接触刚度为 2000 N/m。
本文采用边线绳两个端点在收口绳弧长坐标系中的距离来描述收口程度。在收口过程中, 两个端点在收口绳弧长坐标系中的距离随时间的推移越来越小, 当小于单元的长度时, 认为收口结束, 程序停止计算。
采用上述数据进行仿真, 大约在 0.23s时完成收口。选取收口过程中的 3 个时间点(0.10s, 0.16s和 0.21s), 得到仿真过程中收口绳和边线绳构型变化的三维视图和俯视图(图 4)。可以看到, 随着时间的推移, 边线绳逐渐收紧。
牵引质量块速度的变化见图 5(a), 其中质量块1~4 的位置见图 4 中俯视图所示。质量块的初始速度为 12m/s, 随着时间增加, 质量块速度逐渐减小, 后趋于稳定, 并且 4 个质量块的速度曲线基本上重合, 符合理论分析结论。后半程的速度波动可能是由于未考虑收口环的碰撞对质量块速度的影响。
在收口绳和边线绳的中点处增加一个收口环约束, 保持其他条件不变, 进行收口动力学仿真。牵引质量块 1 的速度变化如图 5(b)所示。可以看出, 增加一个收口环约束对收口快慢的影响不大, 但此时边线绳会收缩得更加紧凑。
表1 绳索参数
Table 1 Rope parameters

弹性模量/MPa横截面积/m2密度/(kgm–2)收口绳长度/m边线绳和连接绳长度/m 68.952.5×10–5100021.6
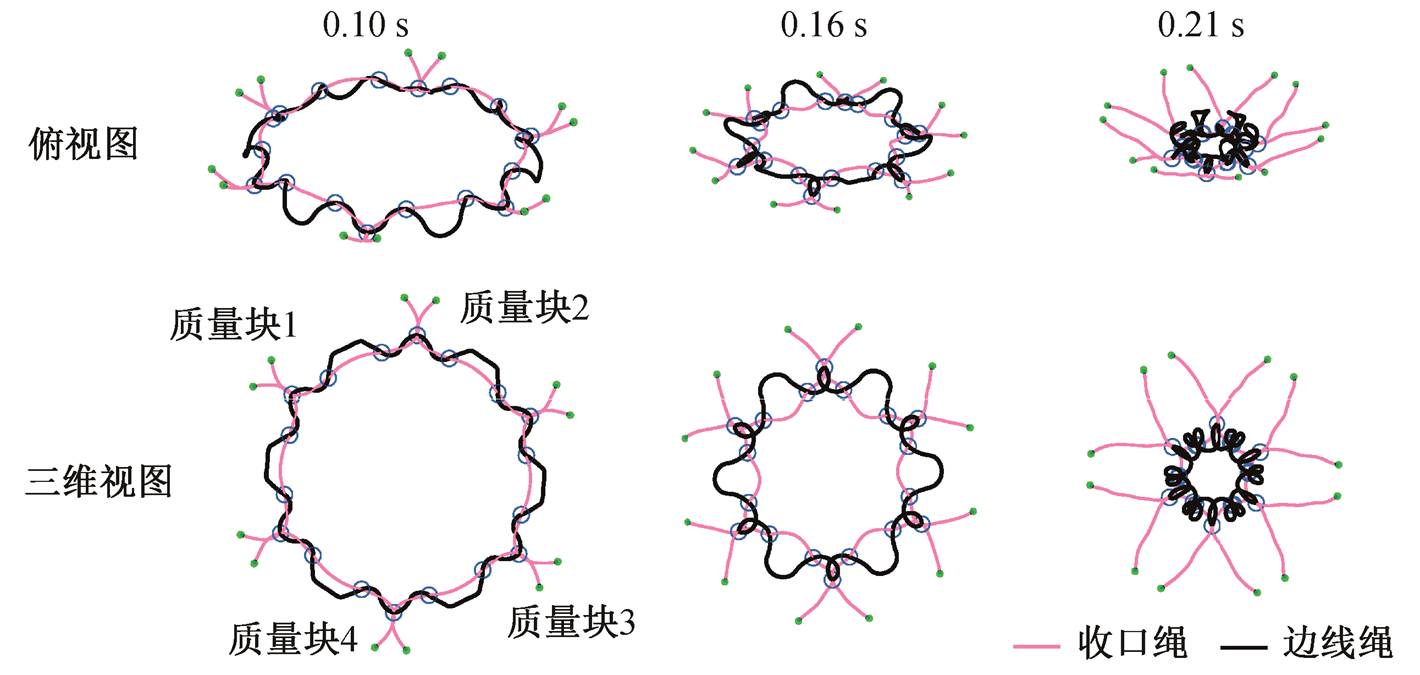
图4 绳索构型三维视图和俯视图
Fig. 4 Rope configuration in 3D view and top view
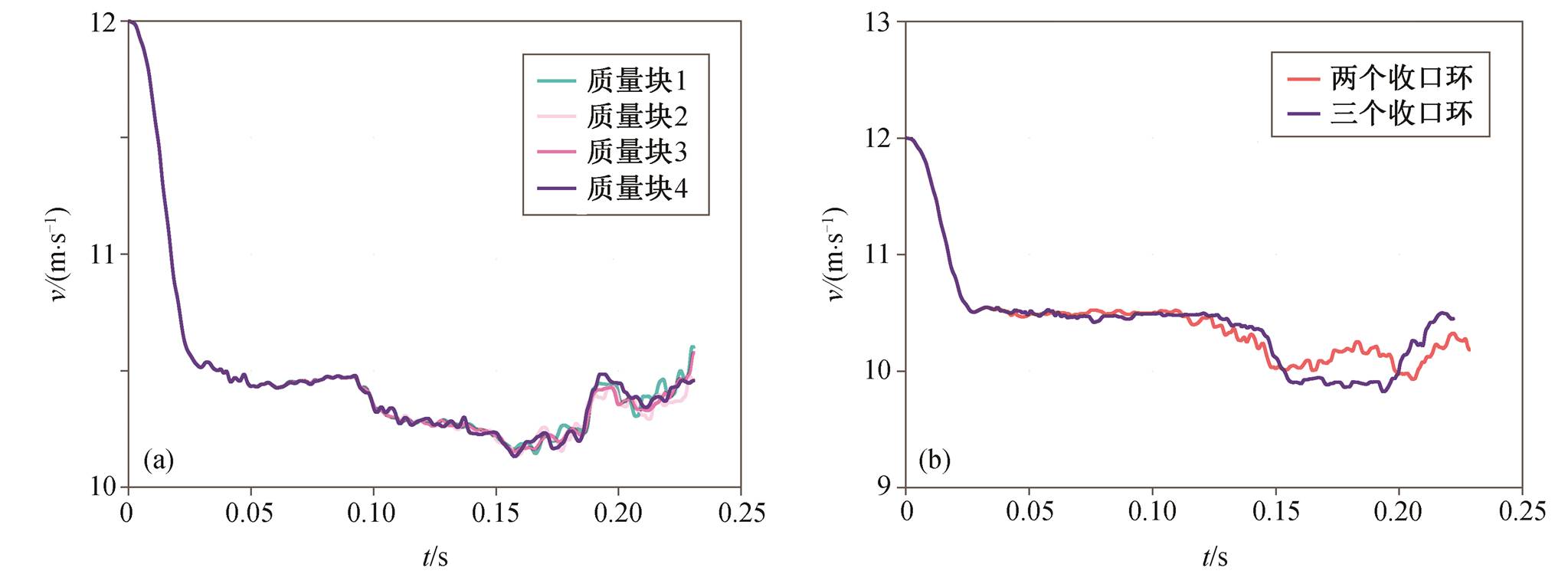
图5 牵引质量块速度变化(a)和质量块1速度对比(b)
Fig. 5 Velocity variation of traction mass blocks (a) and velocity comparison for mass block 1 (b)
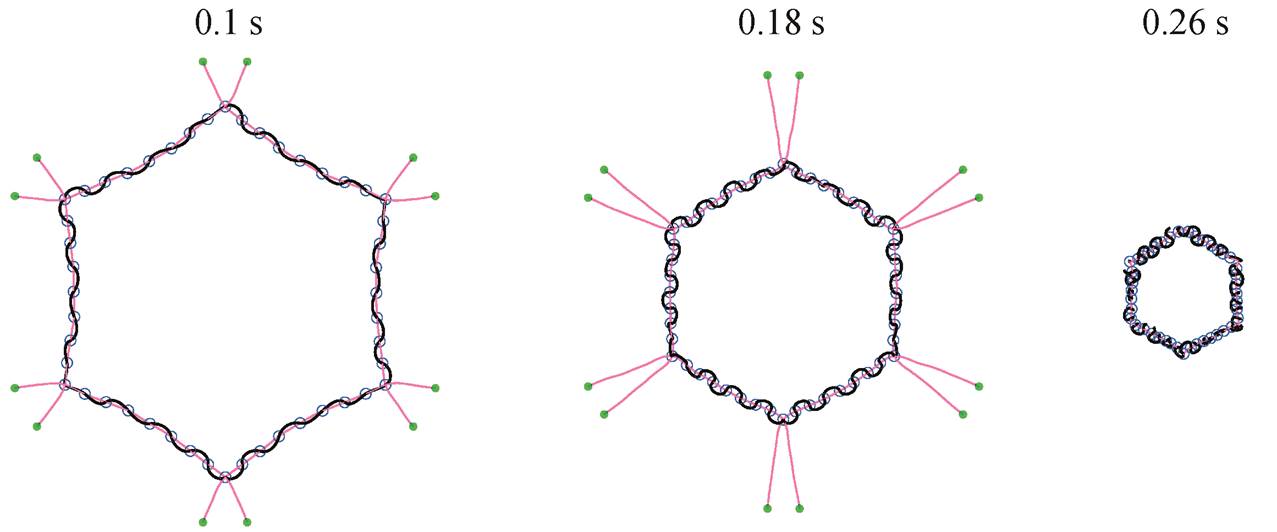
图6 增加收口环约束后绳索构型的俯视图
Fig. 6 Rope configuration in top view after the addition of the closure ring constraint
上述算例中的收口环约束数量较少, 如果在边线绳的每个单元节点上都加收口环约束, 则系统的收口过程会有所不同, 部分时间点收口绳和边线绳的构型俯视图如图 6 所示。值得注意的是, 增加收口环后需增加牵引质量块的质量, 才能使收口顺利进行, 此算例中牵引块质量增加为 20kg, 收口时间约为 0.36s。相比收口环约束较少的情况, 此时边线绳收缩得更加紧凑, 但在收口过程中, 边线绳并非随着时间推移一直收缩, 而是中间伴随扩张的过程。因此, 增加收口绳与边线绳之间的收口环约束会使得收口时间变长, 收口效率降低。这可能是由于收口环数量太多, 相互碰撞, 且分离体未加止拉约束导致。
本文采用约束的方法来描述网捕收口系统中的滑移关节接触问题, 分别对滑移关节、绳索和刚体单元进行建模, 并对收口装置进行初步仿真。
本文模型忽略接触过程中摩擦因素, 将收口环与收口绳的接触简化为球铰滑移关节约束, 分离体与绳索的接触简化为柱铰滑移关节约束, 并分别对两类滑移关节建立约束方程。考虑到滑移关节的碰撞, 引入接触刚度, 建立滑移关节的接触动力学方程。利用绝对节点坐标法描述绳索单元, 采用虚功原理建立绳索单元动力学模型; 对于分离体等刚体, 采用四元数描述建立刚体含约束动力学方程。
通过对收口系统的收口过程建模仿真, 得到收口过程中绳索和牵引质量块的运动规律。在仿真过程中, 边线绳逐渐收紧, 牵引质量块的速度逐渐减小后趋于稳定。通过对比不同收口环数目下的收口时间和收口程度, 可以发现收口环的数目增加可以使边线绳收缩的更加紧凑, 整体收口效果更好, 但较多的收口环会延长收口时间, 降低收口效率。
本文模型和数值仿真可为后续建立完整的含止拉和摩擦的收口系统动力学模型提供了基本理论 支撑。
参考文献
[1] 王握文, 宁凡明. 飞网: 捕获太空垃圾“清道夫”. 科学中国人, 2021(12): 54–55
[2] 张江. 空间绳网捕获过程碰撞动力学研究[D]. 哈尔滨: 哈尔滨工业大学, 2015
[3] 沈剑, 武彦伟, 高怀亮. 空间飞网捕获过程动力学研究. 兵器装备工程学报, 2019, 40(12): 199–204
[4] Tang Lingling, Liu Jinyang. Modeling and analysis of sliding joints with clearances in flexible multibody systems. Nonlinear Dynamics, 2018, 94(4): 2423–2440
[5] Fu K, Zhao Z, Ren G, et al. From multiscale modeling to design of synchronization mechanisms in mesh antennas. Acta Astronautica, 2019, 159: 156–165
[6] Lee S H, Park T W, Seo J H, et al. The development of a sliding joint for very flexible multibody dyna-mics using absolute nodal coordinate formulation. Multibody System Dynamics, 2008, 20(3): 223–237
[7] Hwang R S, Haug E J. Translational joints in flexible multi body dynamics. Mechanics of Structures and Machines, 1990, 18(4): 543–564
[8] Sugiyama H, Escalona J L, Shabana A A. Formulation of three-dimensional joint constraints using the abso-lute nodal coordinates. Nonlinear Dynamics, 2003, 31 (2): 167–195
[9] Shabana A A. Computer implementation of the ab-solute nodal coordinate formulation for flexible mul-tibody dynamics. Nonlinear Dynamics, 1998, 16(3): 293–306
[10] 洪迪峰. 一维移动介质的多体动力学建模方法研究[D]. 北京: 清华大学, 2011
[11] 章孝顺, 章定国, 陈思佳, 等. 基于绝对节点坐标法的大变形柔性梁几种动力学模型研究. 物理学报, 2016, 65(9): 148–157
[12] 刘延柱, 潘振宽, 戈新生. 多体系统动力学. 北京: 高等教育出版社, 2014
Modelling Methods of Constrained Flexible Ropes in Capture Net System
Abstract Due to the difficulty of dynamical modelling of constrained flexible ropes for the closure process caused by the presence of non-smooth contacts and rigid-flexible coupling problem, a simplified model is provided. The contacts between the ropes and the rings or the separators are considered as slip joints, and the dynamical studies are conducted using the constraint method. Considering the collision of the slip joint, the contact stiffness is introduced and the contact dynamics equations of the slip joint are established. The absolute nodal coordinate formulation is used to describe the motion of rope element, and the dynamics model of which can then be established through the principle of virtual work. For rigid bodies such as separators, the quaternion description is used to establish the dynamics equations. The simulation of closure process is performed to obtain the motion law of the rope and the traction mass block, and the closure time and the degree of closure are compared under different numbers of rings. It is found that an increase in the number of rings will result in a more compact contraction of the rope, but considerable rings will prolong closure time and reduce closure efficiency.
Key words capture net; constrained flexible ropes; slide joint; absolute node coordinate formulation