图1 数字孪生结构模型[21]
Fig.1 Digital twin structure model9[21]
doi: 10.13209/j.0479-8023.2022.083
北京大学学报(自然科学版) 第58卷 第5期 2022年9月
Acta Scientiarum Naturalium Universitatis Pekinensis, Vol. 58, No. 5 (Sept. 2022)
收稿日期: 2021-09-27;
修回日期: 2021-10-13
摘要 针对由智能网联车和普通车构成的异质交通流, 通过分析不同异质交通流稳定性方法的优劣, 用数字孪生技术构建城市异质交通流模型, 借助仿真测试工具, 探讨复杂异质交通流的安全性和稳定性问题。在构建的模型基础上, 结合数字孪生的运行机制, 揭示数字孪生物理实体和虚拟空间的运行机理。采用数字孪生技术搭建丰富的测试环境, 运用无人驾驶开发软件 PanoSim, 对异质交通流模型进行测试。测试结果表明, 用数字孪生技术在有限资源条件下构建的虚拟复杂驾驶场景能够有效地解决异质交通流安全性问题。
关键词 数字孪生; 异质交通流; 网联车; 安全性
随着汽车产业以及大数据、人工智能(artificial intelligence, AI)、物联网和云计算等技术的快速发展, 综合无线通信、数据融合和人机交互等技术手段, 逐步实现车辆运行信息的共享和数据的实时获取, 智能网联车(connected and autonomous vehicle, CAV)应运而生。CAV 包含自适应巡航(adaptive cruise control, ACC)和协同自适应巡航(cooperative adaptive cruise control, CACC)两种跟驰行为模 式[1]。当前后车辆的车载检测设备可相互获取加速度和速度信息时, 则两车具备相互通信功能, 启用 CACC 跟驰行为模式; 当 CAV 车辆跟随人工驾驶车辆(human-driving vehicle, HV)时, 前后两车不具备车车通信功能, 则启用 ACC 跟驰行为模式[2]。当 CAV 车辆大规模涌入道路时, 交通流必定经历ACC 与 HV 混合, 以及 ACC, CACC 与 HV 混合的情况, 这种智能网联车与人工驾驶车辆混合的交通流称为异质交通流。
国内外学者对异质交通流的研究已取得一定的成果, 研究方向集中于 CAV 车辆对通行能力的提升、对交通流稳定性和安全性的改善等。Taleb-pour 等[3]通过数值仿真实验, 描绘不同 CAV 渗透率下的异质交通流流量密度散点图。常鑫等[4]基于CAV 与 HV 混合交通流的基本安全距离, 推理出交通流模型。秦严严等[5]利用不同平衡态速度以及不同比例 CACC 车辆的混合交通流, 进行稳定性解析, 并构建基础交通流模型。Zeng 等[6]基于元胞自动机模型, 利用汽车的反馈时间建立刹车灯模型。随着智能网联汽车行业的发展, 2050 年CAV 车辆在道路上的占比将达到 75%以上[7]。为应对 CAV 的规模化及产量化, 研究异质交通流的安全性和稳定性非常必要。
目前, 评析 CAV 车辆环境下异质交通流稳定性的方法与研究 HV 车辆运行的方法相似, 主要的评析方法包括软硬件仿真测试、封闭空间实测和开放空间实测等, 多数研究是利用数值仿真进行实验, 得出道路上 CAV 车辆最佳渗透率以及前后车有效间隔等。这些研究有各自的优缺点。例如, 利用CAV 车辆对交通环境影响建立的分析模型推导了异质环境下的交通流量期望值和车辆间隔距离[8], 但忽略了 HV 车辆的随机性, 无法投入到实际道路上。Chen 等[9]考虑到 CAV 和 HV 车辆混行的情况, 发现车辆的加速度和跟驰行为对整体的交通流量是有影响的, 但他们提出的对 CAV 车辆的控制策略过于单一化。Ye 等[10]基于 CAV 车辆的控制策略, 提出自动驾驶专用车道。Papadoulis 等[11]从安全性角度分析 CAV 车辆结成队列行驶对交通的影响。Zhong 等[12]从机动性、安全性和稳定性等角度设定多种车道管理策略, 但未涉及 CAV车辆与 HV 车辆的交互问题。Zhou 等[13]考虑到异质车辆的协同, 提出四车道的元胞自动机交通建模来模拟 CAV 车辆和 HV 车辆的运行环境, 但他们提出的车辆控制策略缺乏上层架构, 不能运用到实际中。此外, Jeroen 等[14]进行实车实验, 计算 CAV 车辆可行的车头时距。Ando 等[15]为进一步提升 CAV 车辆在异质交通环境下产生的增益, 首次提出用多智能体聚集的方式考虑 CAV 车辆问题。同时也有研究提出相关连通模型[16–17]。
总之, 目前对异质交通流的研究都涉及根据CAV 比例和密度建立相关运动模型, 但都仅限于基础的高速公路交通流, 没有考虑周围大环境对交通的影响因素。本文采用数字孪生(digital twin)技术, 通过构建不同的复杂交通环境, 将数字信号传输给现实车辆, 对真实交通流进行决策和控制执行, 确保异质交通流的稳定性。
数字孪生是利用物理模型、历史运行数据和传感器更新数据等, 建立多尺度、多物理量的仿真模型, 通过虚拟空间完成对真实数据的映射, 具有实时同步和映射真实等特性[18]。2016 年和 2017 年, 全球最具权威性的 IT 研究和顾问咨询公司 Gartner 将数字孪生定为十大战略科技发展趋势之一。2017 年 12 月, 在世界智能制造大会上, 数字孪生被列为世界智能制造十大科技进展之一[18]。
广义的数字孪生指以数据为基础创建真实实体的虚拟模型, 借助数字通信技术获取数据, 从而模拟物理实体的行为[18–19]。数字孪生早期用于构建未来飞行器, 借助数字孪生技术在虚拟空间建立飞行器模型, 并利用传感器与真实飞行器实时同步来计算飞行器的载荷和飞行能力。Richard 等[20]认为数字孪生不仅适用于飞行器, 还可应用于更加广泛通用的产品中。
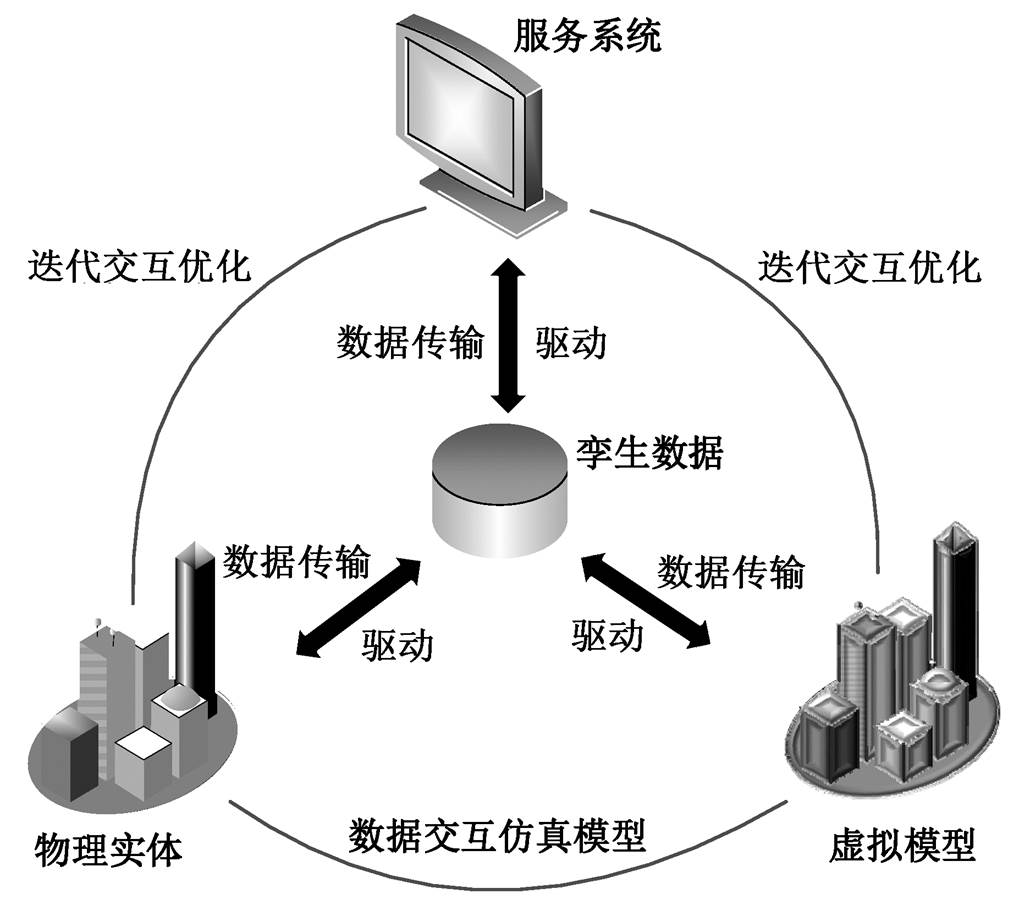
Tao 等[21]结合多年对物联网、大数据等的研究, 将数字孪生技术构建成以孪生数据为核心, 物理实体、虚拟模型和服务系统三者迭代, 交互优化的五维模型(图 1)。在工业 4.0 体系研究中, 数字孪生技术也扮演着重要角色, 包括数字孪生驱动的车间快速设计和工艺设计以及基于数字孪生的生产物流智能化配送等[22–24]。随着数字孪生技术在大数据和云计算中的应用逐步广泛, 其对智能网联汽车的开发制造也有所涉足, 并逐步应用于对 CAV 车辆的测试。
图1 数字孪生结构模型[21]
Fig.1 Digital twin structure model9[21]
数字孪生技术主要由可观测的物理实体和孪生空间的虚拟实体组成, 基于五维结构建立基本构架, 其框架内部各部分互通互联, 数据信息交换, 并且基于信息互换、数据保证、安全保障和数化保真的原则进行内部互联(图 2)。
本文基于异质交通流模型和数字孪生的框架,狭义地定义数字孪生: 车辆处于真实的测试场地环境中, 在真实车辆上部署各种传感器, 利用数字通信技术, 集成 CAV 车辆和 HV 车辆的几何、物理、行为及规则, 建立数字模型, 将模型映射到虚拟空间。虚拟空间通过构建不同的复杂交通环境, 利用模拟仿真软件对孪生数据进行仿真, 然后将生成的仿真数据发送给实际道路上的车辆。真实场景中的CAV 车辆接收到信号后, 对信号进行分析和判断, 执行控制动作, 确保道路通行顺畅, 再将车辆动作反馈回虚拟空间, 以便对车辆的决策和对控制执行能力进行评估、优化、预测及评测等[19]。
不同于其他数字孪生运用的场景, 基于数字孪生驱动的异质交通流场景包括“车–路–环境–基础设施”4 个要素。每个要素之间相互关联, 在数字孪生的虚拟模型构建中, 除对单一要素的建模外, 还要考虑每个要素对其他要素的影响, 以及其他要素对其产生的影响。本文基于混合交通流场景, 建立数字孪生的基本框架(图 3)。
该框架以数字孪生、交通感知、数据传输等支撑技术为基础, 通过构建数字孪生分析平台并进行海量数据分析, 利用车载或路侧感知装备等提供动态监控和预警预测, 再经由数字孪生分析平台进行智能分析、决策支撑等功能运行服务, 为异质交通流的研究和应用需求提供支撑。
该框架包括基础设施层、数据层、服务层和应用层 4 个部分。该框架以基础设施层为基础, 分为交通路侧设施和车载传感器、数据存储和数据分析服务器。用车载摄像头和车载雷达等对车辆信息进行感知, 运用路侧或车载交通环境感知装备对道路气象、道路环境进行实时反馈, 经由快速巡检车、激光或探地雷达等对基础道路路面和路基等进行数据记录, 再进行存储分析。数据层分为静态场景和动态场景的数据, 包括高精度地图、车辆路侧数据以及交通仿真数据等。运用 5G 移动通信系统、光纤传输和无线传输等方式, 将数据层信息传输到服务层。服务层主要包括 5 个模块: 场景渲染模块、路侧或车载传感器数据模块、孪生数据生成模块、交通分析模块、交通仿真模块。应用层包括基于孪生数据模型对交通进行实时监控、监测和管理, 对交通情况进行分析评价以及可视化, 对数字孪生交通流进行管理决策等功能支持。应用层依据基础设施层、数据层以及服务层的共同传输, 融合车辆情况、交通环境以及道路设施等实时数据, 经过数字孪生分析平台进行智能分析, 再将指导决策信息传输回实际道路, 确保交通流运行的安全和稳定。
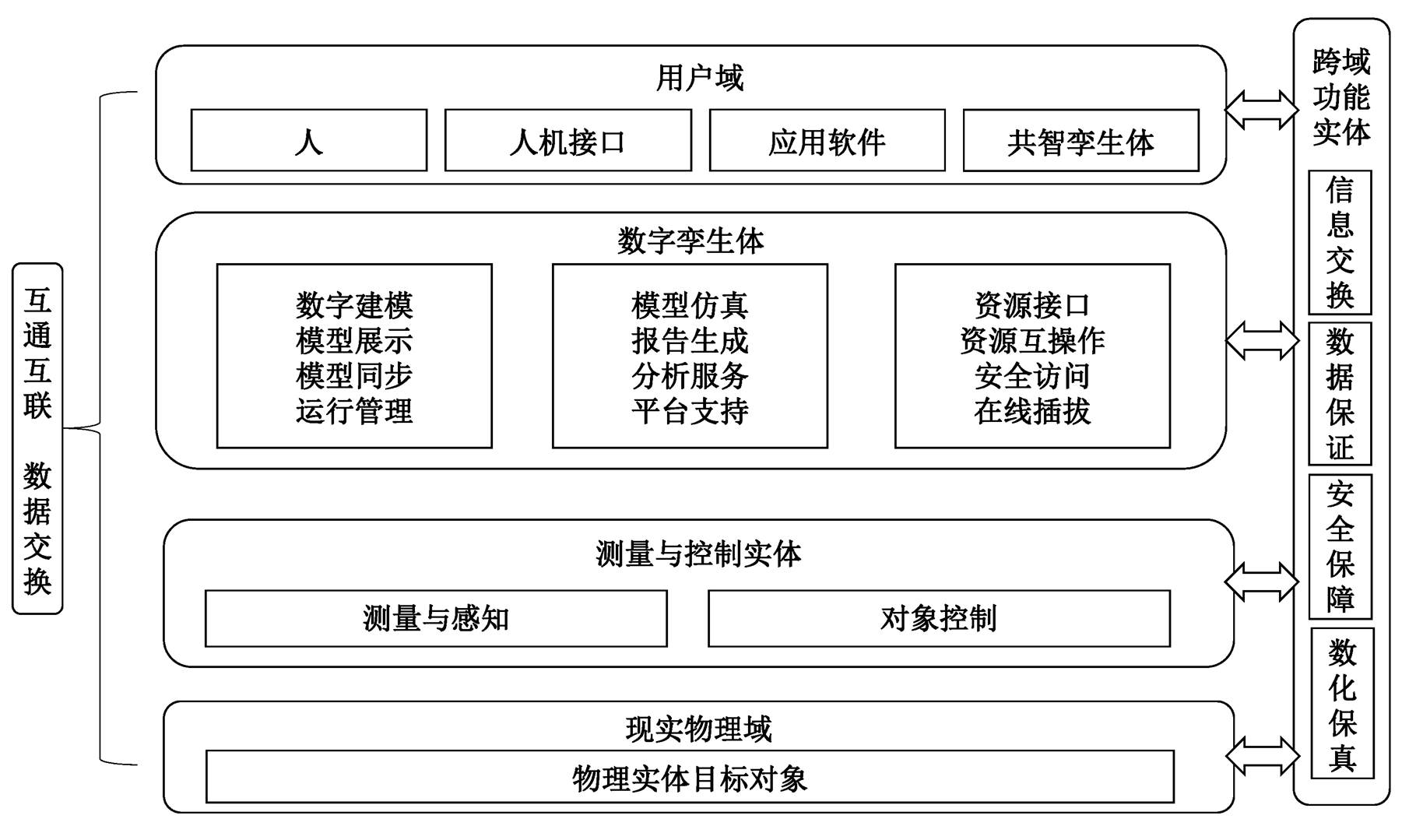
图2 数字孪生技术框架
Fig. 2 Digital twin frame
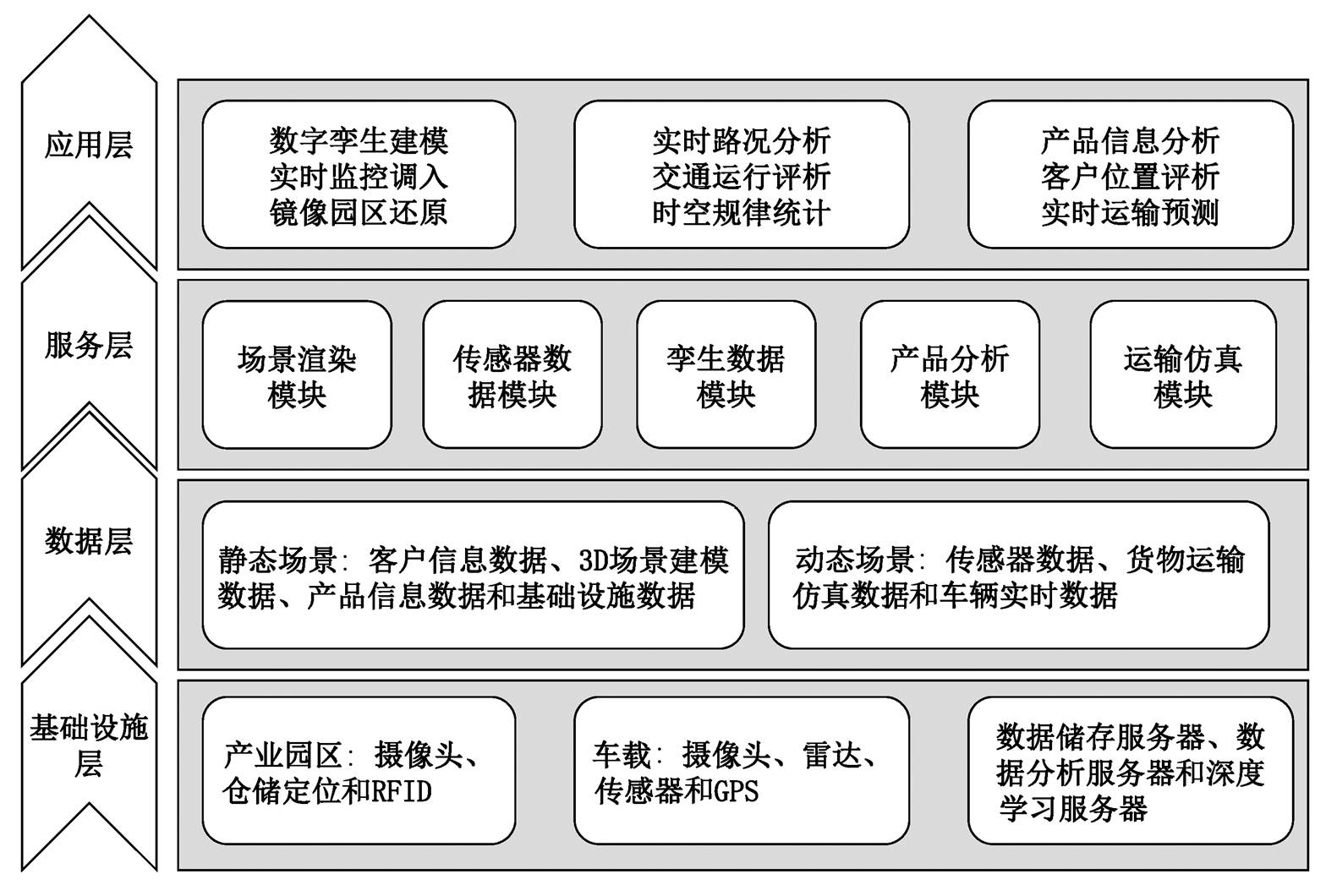
图3 异质交通场景下的数字孪生框架
Fig. 3 Digital twin framework in heterogeneous traffic scenarios
通过数字孪生技术构建异质交通流的孪生数据模型, 对实际交通流进行监测、决策和指导。图 4示意异质交通流–数字孪生模型的工作机制, 包括运行前、运行过程中以及运行结果输出及反馈 3 个部分。
1)交通流运行前, 设定 CAV 车辆的投放数量和投放位置。为支持整体的交通流稳定运行计划, 收集相关数据, 包括车载传感器、路侧传感器、历史模拟数据(如设备故障预测和道路拥堵预测等)和EIS 数据, 提供数据融合服务, 将车辆、交通情况和道路环境数据进行融合, 再传输回 CAV 车辆运行计划。经由 CAV 车辆运行计划传输到异质交通流孪生模型的虚拟空间中进行验证, 在虚拟空间仿真运行之后, 将内部发现的潜在冲突进行优化和修改, 发回 CAV 车辆运行计划中, 再将运行计划传输到车辆分配以及运行前准备中, 如果数据实时状态发生变化, 运行计划可以随时反馈并进行修改。
2)交通流运行过程中, 将已验证的交通运行稳定数据传输到虚拟空间进行预定义, 以备后续车辆运行, 然后通过运行指令启动实际交通流运行, 并实时确认运行状态, 保持与预定义运行过程同步。一方面, 将实时交通流监测数据记录到虚拟空间中进行仿真、评估、优化和预测; 另一方面, 基于虚拟空间中的仿真模型进行实时操作执行, 确保交通流的稳定性和安全性。运行期间, 依据真实交通流将虚拟空间的预定义数据实时更新, 如果这两部分数据不一致, 将传输到评估机制(数据融合)中, 鉴定数据的不一致是否由误差、设备故障或仿真模型的不精准等因素导致。如果存在以上情况, 将传输到调度机制、质量服务以及总控机制等模块来消除或减少。
3)交通流运行完成时, 如果实时交通流与虚拟空间的仿真数据保持一致, 说明此次交通流监测实验可正常运行。将运行完成数据存入历史数据库, 以备后续测试, 同时输出此次测试结果。
依据数字孪生技术的概念, 除物理实体、虚拟空间和服务系统三者可以相互迭代优化外, 数字孪生驱动的异质交通流的物理实体内部也可以实现互联互通。从纵向角度看, 运行机制将融合数据和运行计划传输到虚拟空间, 再由虚拟空间接收控制指令。从横向角度看, 路侧传感器、车载传感器和雷达等感知道路信息, 运用信息控制发布器和信息基站相互传输数据, 将其传输到云计算平台进行精准分析, 从而做到调节自身或他人, 达到正常行驶的行为目标。如图 5 所示, 物理实体运行机制以实时、多源数据为支撑, 对汽车进行动态优化和精准控制, 实现异质交通流的安全性、稳定性和高效性。
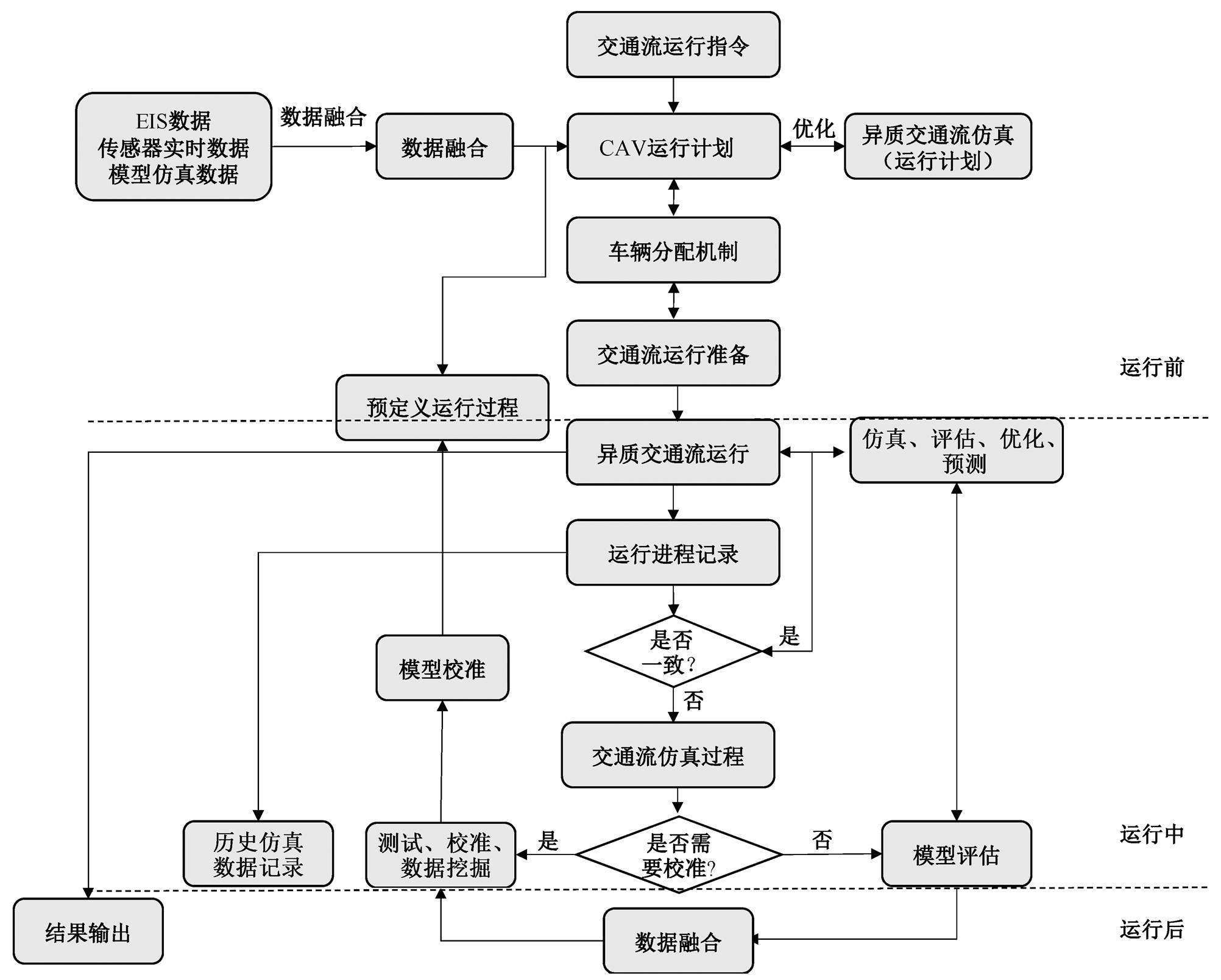
图4 异质交通流–数字孪生模型流程图
Fig. 4 Flow chart of heterogeneous traffic flow digital twin model
作为以孪生数据建立的数字镜像模型, 虚拟空间要确保对物理实体模拟的高保真度。图 6 为虚拟空间内部运行机制。首先通过对融合数据和历史数据进行测算, 不符合计划条件的进行迭代优化; 然后, 将运行过程与预定义计划进行对比, 确定保持一致后, 继续交通流仿真; 不一致的参数需要进行模型评估与校正, 保证模型数据不受设备故障或仿真模型不精准等因素的干扰, 减小仿真模型中存在的误差。
1)动力学建模。动力学建模是汽车模拟仿真的核心, 汽车高精度建模和高效数值仿真包括高精度底盘(制动、转向和悬架)和动力系统(发动机和动力传动系统)建模。在孪生数据模拟仿真的场景下, 车辆按照规划轨迹行驶, 所以轨迹规划过程应尽可能贴近实际情况, 并且符合车辆运动学和动力学的规律。
2)复杂的汽车行驶环境和环境传感器建模。在实际道路中, 汽车行驶环境十分复杂, 其中包括道路、交通及交通附属设施、天气等影响因素, 不仅影响着汽车行驶的安全、稳定和汽车的性能, 也影响车载、路侧传感器对环境的检测和感知, 因此准确模拟汽车行驶环境是研究和仿真孪生模型的关键。
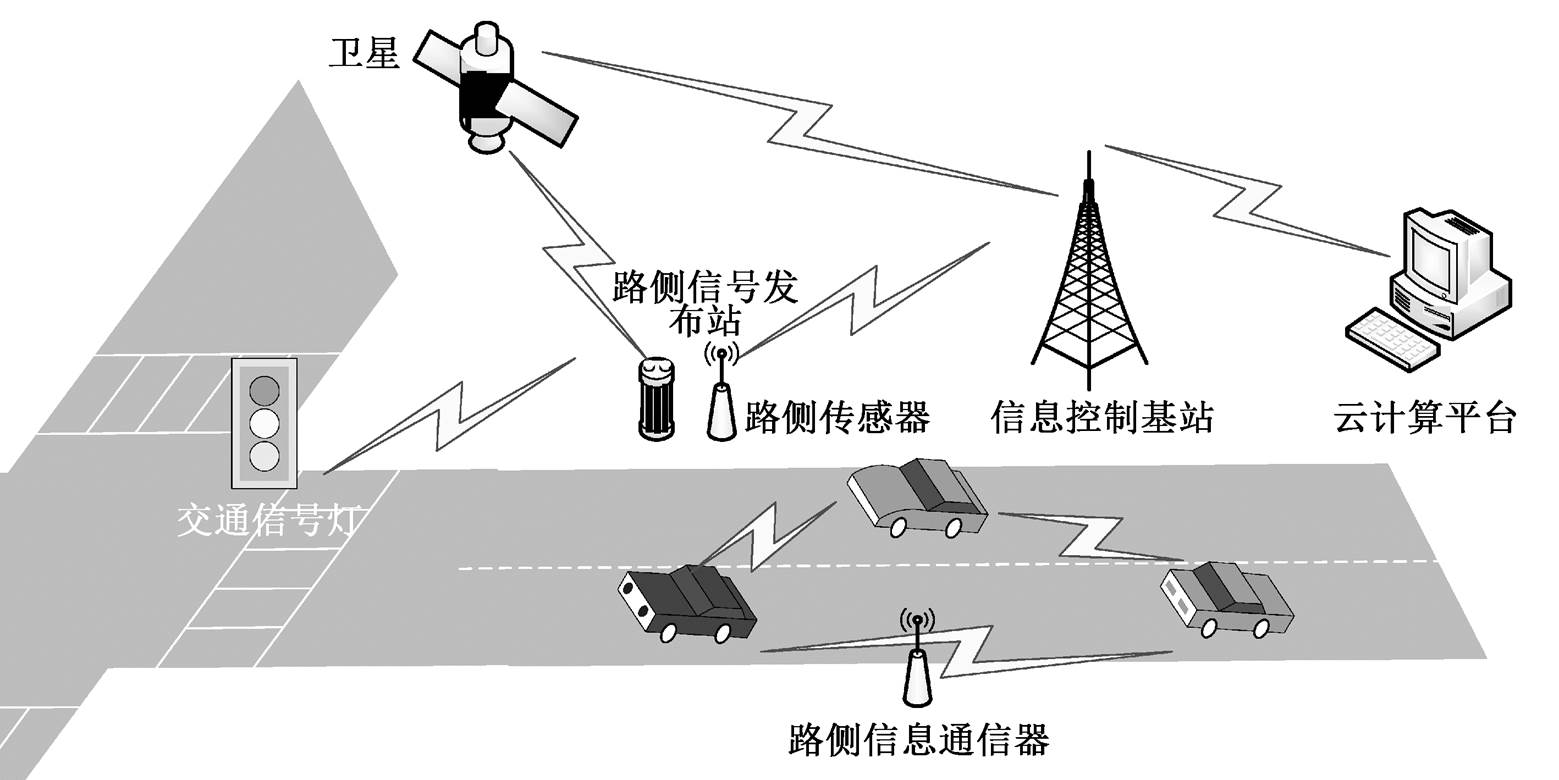
图5 物理实体运行机制
Fig. 5 Physical entity operation mechanism
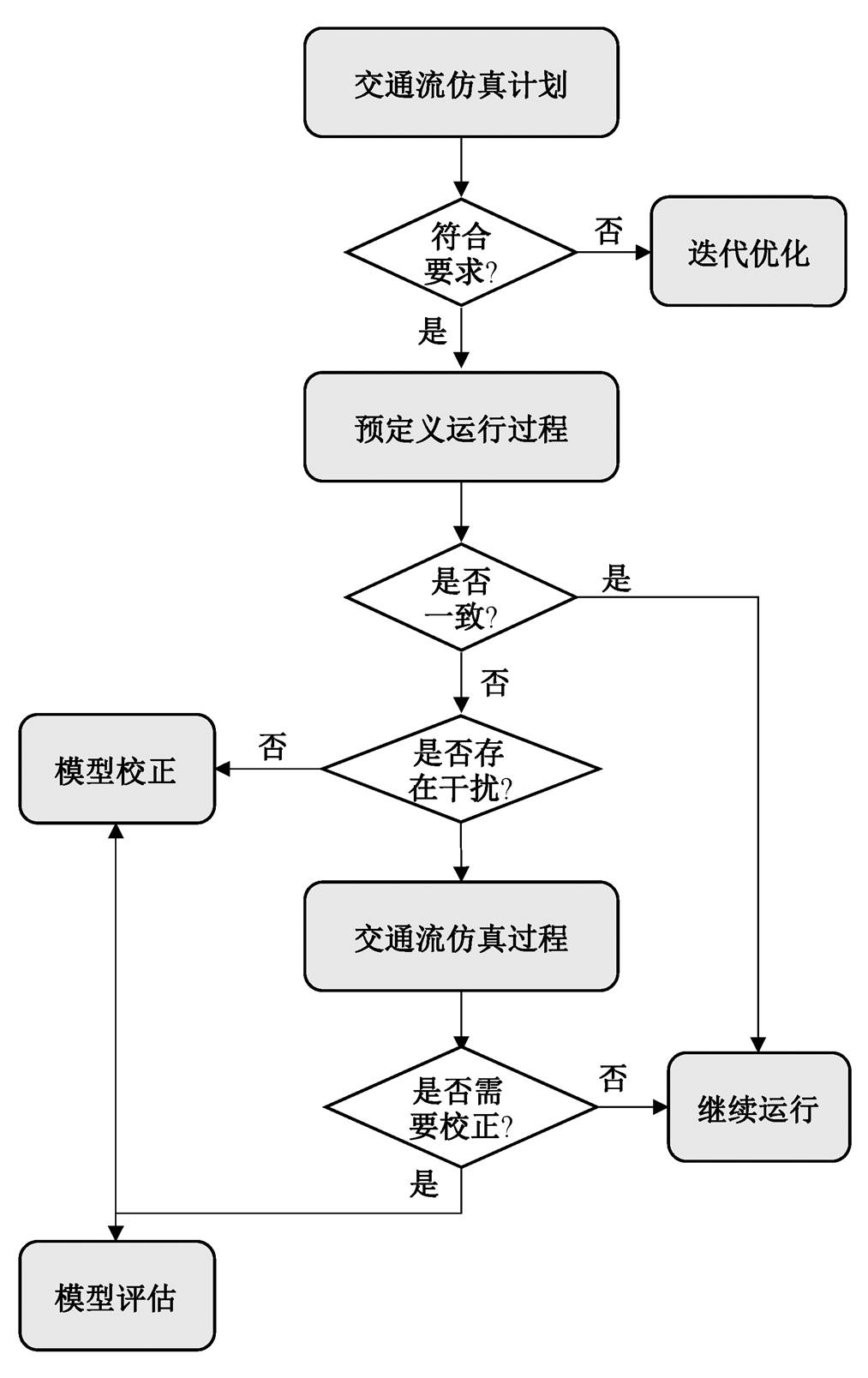
图6 虚拟空间内部运行机制
Fig. 6 Internal operation mechanism of virtual space
本文利用无人驾驶仿真软件 PanoSim 4.1 软件内设定的各种场景(包括气象、交通障碍和人物性格特征等), 建立以车辆动力学模型为基础的异质交通流场景。对每辆模拟仿真车都构建一个完整的车辆动力学模型, 包括该车的速度、航向角、侧群角和俯仰角等信息。车辆信息可由 Simulink 的 TCP或 UDP 进行存入, 也可以对汽车的特定信息也可以在 PanoSim 软件内部进行编程修改。
1)实验环境。在 Windows 2010 和 PanoSim 4.1环境下, 利用 Simulink 相关系统进行实验。运用PanoSim 软件设定场景信息, 添加智能网联车辆和障碍车辆, 车辆按照设定运行轨迹直线行驶至路口, 设定干扰行人直线穿过障碍车辆前方。配置仿真参数(表 1), 通过参数来设定仿真车辆与行人相遇的时间。
2)实验对象。以智能网联车正常运行以及行人横穿路面为例, 选取夜间虚拟场景, 设置障碍车辆(图 7 中公交车)及障碍行人。选取的智能网联车模型以毫米波传感器作为车载感知系统模块, 基于车载传感器信息、障碍车辆的运行状态以及测试智能网联车的运行状态进行紧急制动实验。
表1 仿真参数
Table 1 Simulation parameters
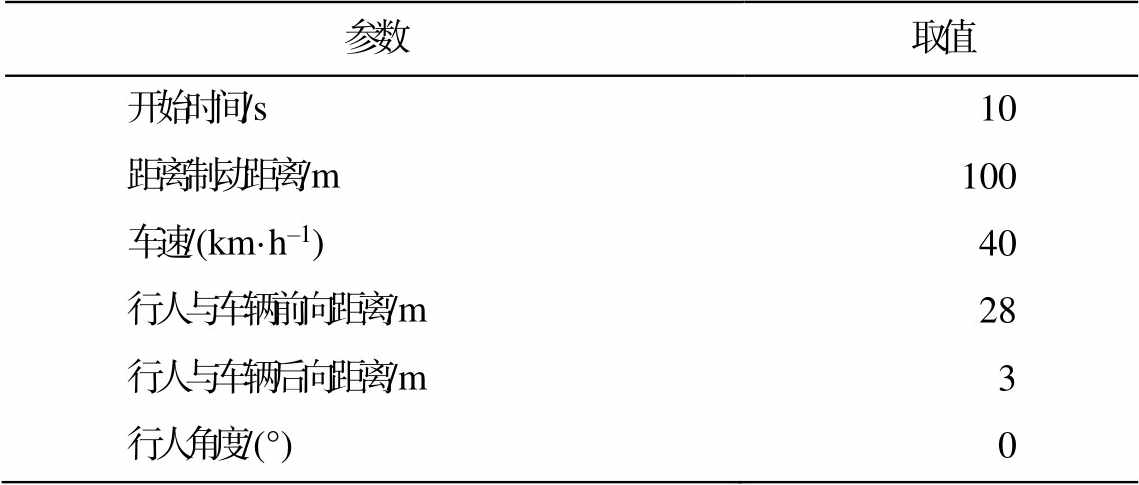
参数取值 开始时间/s10 距离制动距离/m100 车速/(km·h–1)40 行人与车辆前向距离/m28 行人与车辆后向距离/m3 行人角度/(°)0
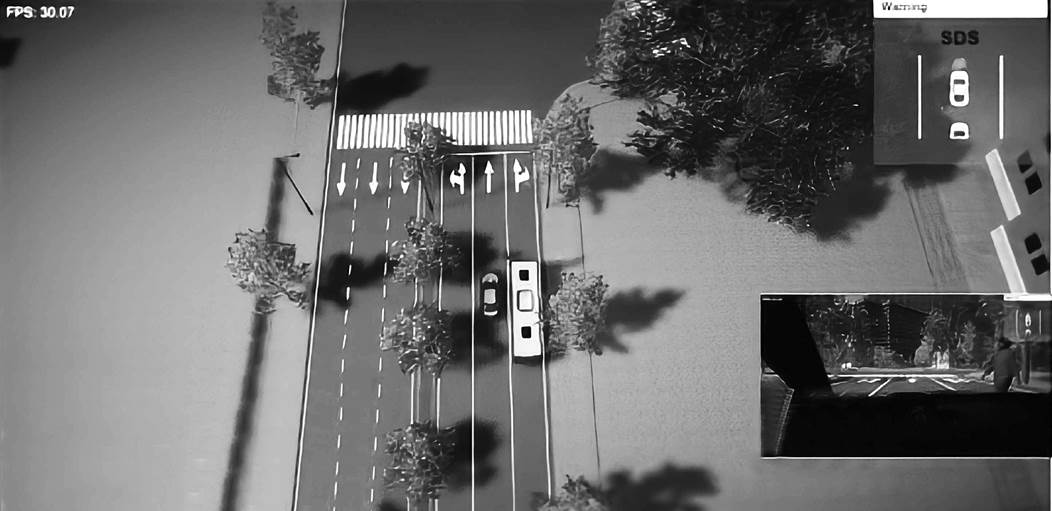
图7 PanoSim仿真交通场景
Fig. 7 PanoSim simulation traffic scenario
如图 7 所示, 基于 PanoSim 软件完成虚拟仿真和真实环境信息的交互。
智能网联车辆基于 ACC 车辆算法(图 8)向路径前向运行, 运行过程中对障碍车(图 7 中公交车)进行跟随控制(加速和制动)。当智能网联车与前车信息互通, 得到行人出现警告而制动时, 由 ACC 车辆算法转变为 AEB (autonomous emergency braking, AEB)算法(图 9), 控制车辆进行紧急制动, Simulink中断驾驶员模块对车辆的纵向控制(油门开度和制动压力)。
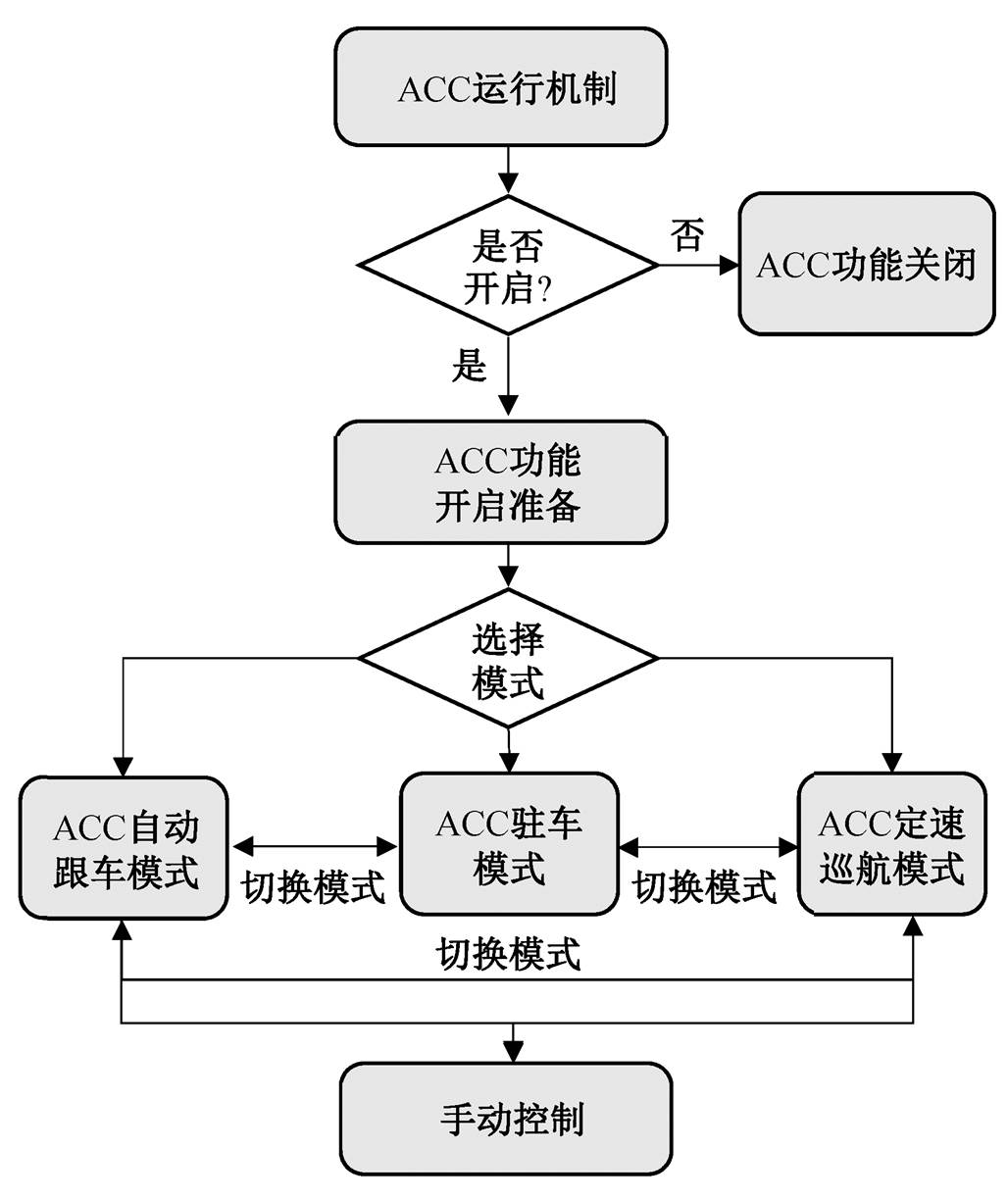
图8 ACC车辆算法流程图
Fig. 8 Flow chart of ACC vehicle algorithm
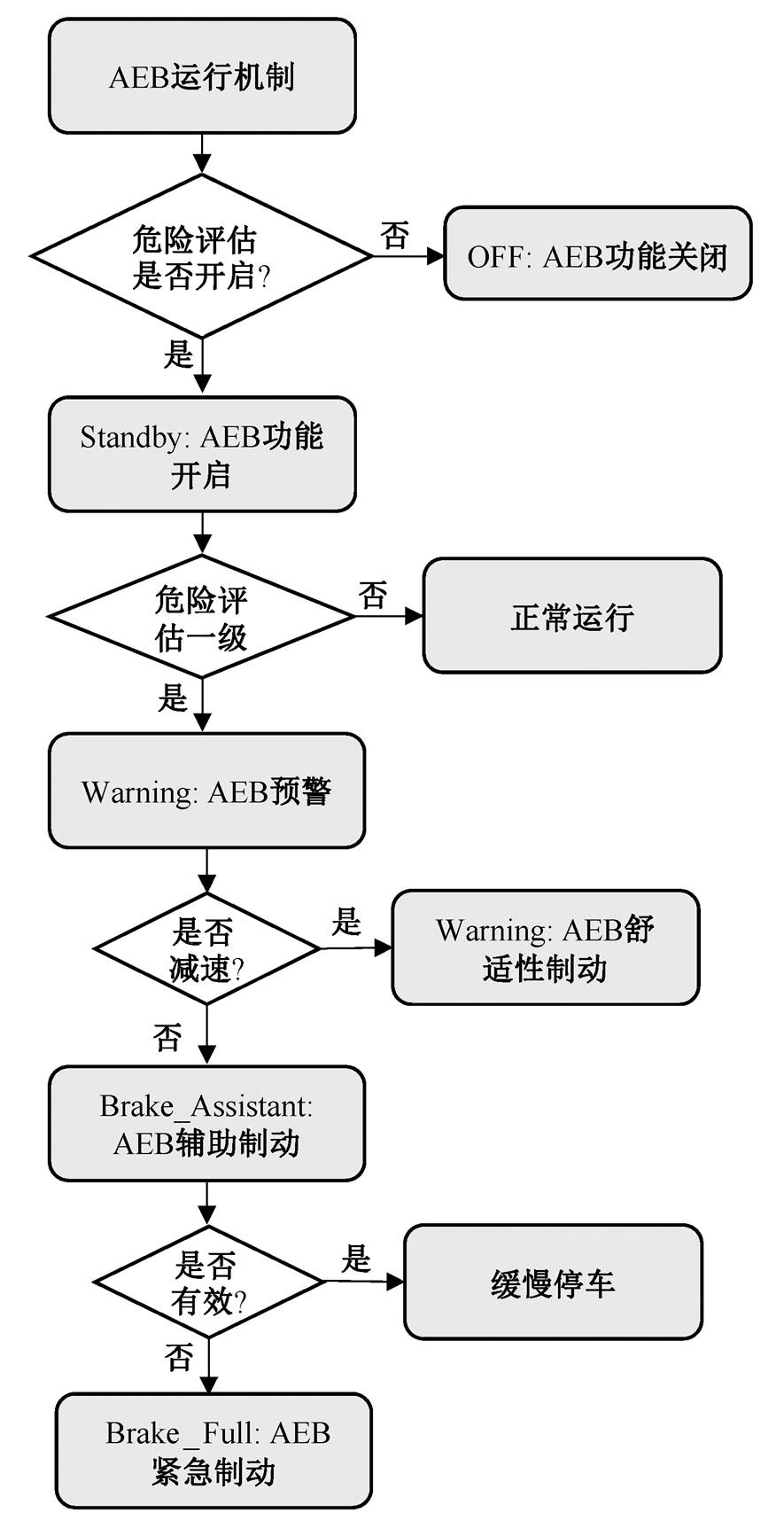
图9 AEB控制算法流程图
Fig. 9 Flow chart of AEB control algorithm
根据实际交通情况算定碰撞时间阈值: 当时间阈值大于 4s 时, 智能网联车辆运行 ACC 车辆算法, 不转换为 AEB 算法; 当时间阈值小于 4s 时, 会进行紧急制动警告; 当时间阈值小于 2s 时, 在运行ACC 车辆算法的同时, 也运行部分 AEB 算法; 当时间阈值小于 1.2s 时, 全部转换为 AEB算法, 进行紧急制动, 减速停车。
碰撞时间阈值公式[25]为
TTC = XC(t)/Vr(t), (1)
其中, TTC 为碰撞时间阈值; XC 为距离差; Vr 为车辆相对速度。
仿真智能车辆在依据仿真参数正常行驶过程中, 当时间阈值小于 2s 时, 公交车辆开始进行制动警告提示, 说明前车有行人经过, 智能网联车将部分算法转变为 AEB 算法, 进行减速行驶; 当时间阈值小于 1.2s 时, 智能网联车即将碰撞行人, 车辆完全转变为 AEB 算法, 紧急制动, 停在行人面前, 等待行人完全通过车身, 再转为 ACC 车辆算法, 进行纵向行驶穿过路口。紧急制动仿真模拟实验完成, 得出实验车辆运行时间与速度的图像(图 7)。
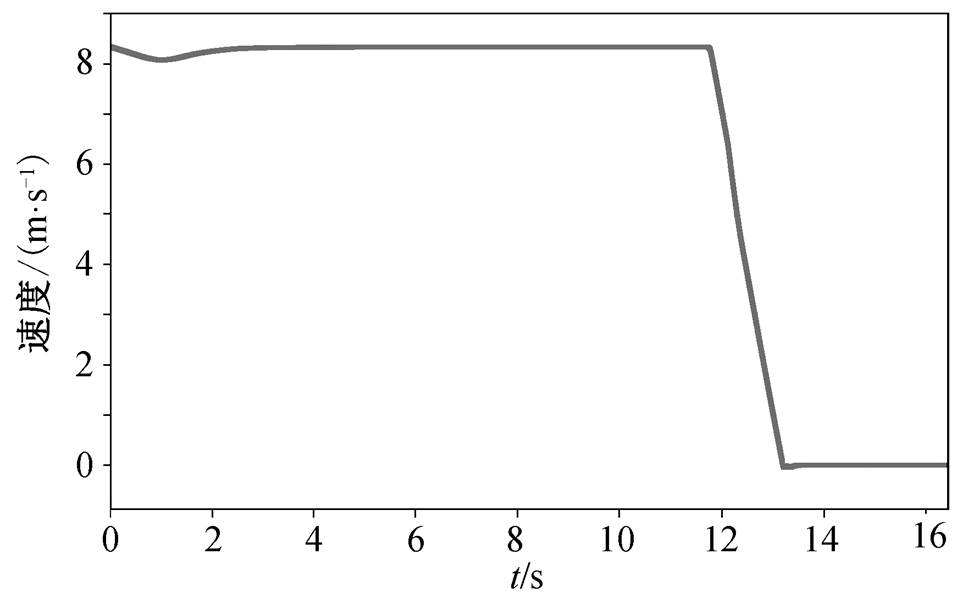
图10 仿真汽车速度图
Fig. 10 Simulated vehicle speed diagram
从图 10 可以看出, 智能网联车在碰撞时间阈值过小时, 会开始减速, 直到停止。这表明, 数字孪生仿真方式可以对智能网联车进行有效的仿真控制, 进而监测异质交通流, 对交通流运行进行决策, 可以有效地保障异质交通流的安全性。
本文结合无人驾驶仿真软件 PanoSim, 搭建数字孪生分析模型, 针对 CAV 车辆和传统人工驾驶车辆构成的异质交通流, 基于仿真模型研究其安全性和稳定性。
1)本文建立了数字孪生驱动的异质交通流解析框架, 将仅基于线性函数模型的交通流分析转变为基于真实孪生数据建立的仿真模型分析, 便于在真实交通环境下研究异质交通流的安全性。
2)本文利用无人驾驶仿真软件 PanoSim, 仿真了在真实环境下 ACC 车辆与行人发生碰撞时, 出现的紧急制动反应, 证明异质交通流可经由数字孪生搭建的仿真环境进行测试和验证。
3)数字孪生搭建的仿真环境可有效地应对交通路面的紧急情况, 不同的 AEB 制动模式可以应对不同的突发状况和复杂的交通情况。
数字孪生技术在交通流的研究未来将逐步深入, 会增加更多的实际行车数据, 也可以丰富本文框架下的交通运行研究。此外, 通过目前成熟的无人驾驶仿真软件, 对历史数据和融合数据进行模型的参数拟合和迭代优化, 可以优化现有 CAV 和 HV车辆的动力学模型, 针对特定的个体轨迹数据反复进行测试, 分析在异质交通流中车辆的各种特征, 建立更具有包容性、可行性的汽车动力学模型, 使其在未来的仿真中更具代表性。
参考文献
[1]吴德华, 彭锐, 林熙玲. 智能网联异质交通流混合特性. 西南交通大学学报, 2022, 57(4): 761–768
[2]秦严严, 王昊, 王炜, 等. 混有 CACC 车辆和 ACC车辆的异质交通流基本图模型. 中国公路学报, 2017, 30(10): 126–136
[3]Talebpour A, Mahmassani H S. Influence of connec-ted and autonomous vehicles on traffic flow stability and throughput. Transportation Research, Part C: Emerging Technologies, 2016, 71(10): 143–163
[4]常鑫, 李海舰, 荣建, 等. 混有智能网联车队的交通流基本图模型分析. 东南大学学报(自然科学版), 2020, 50(4): 782–788
[5]秦严严, 王昊, 王炜, 等. 混有协同自适应巡航控制车辆的异质交通流稳定性解析与基本图模型. 物理学报, 2017, 66(9): 257–265
[6]Zeng J, Qian Y, Mi P, et al. Freeway traffic flow cellular automata model based on mean velocity feed-back. Physica A: Statistical Mechanics and its App-lications, 2021, 562(15): 125387
[7]Bansal P, Kockelman K M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transportation Research, Part A: Policy and Practice, 2017, 95(1): 49–63
[8]Mohajerpoor R, Ramezani M. Mixed flow of autono-mous and human-driven vehicles: analytical headway modeling and optimal lane management. Transporta-tion Research, Part C: Emerging Technologies, 2019, 109(12): 194–210
[9]Chen D, Anupam S, Ahn S, et al. Traffic dynamics under speed disturbance in mixed traffic with auto-mated and non-automated vehicles. Transportation Research, Part C, 2020, 113(4): 283–313
[10]Ye L, Yamamoto T. Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput. Physica A: Statistical Mechanics and Its Applications, 2018, 512(8): 588–597
[11]Papadoulis A, Quddus M, Imprialou M. Evaluating the safety impact of connected and autonomous vehi-cles on motorways. Accident Analysis & Prevention, 2019, 124(12): 12–22
[12]Zhong Z, Lee J. The effectiveness of managed lane strategies for the near-term deployment of cooperative adaptive cruise control. Transportation Research Part A: Policy and Practice, 2019, 129(8): 257–270
[13]Zhou Y J, Zhu H B, Guo M M, et al. Impact of CACC vehicles’ cooperative driving strategy on mixed four-lane highway traffic flow. Physica A: Statistical Mechanics and Its Applications, 2019, 540(1): 122721
[14]Jeroen P, Alex F A, Geert J, et al. Connect & Drive: design and evaluation of cooperative adaptive cruise control for congestion reduction. Journal of Modern, 2011, 3(9): 207–213
[15]Ando H, Suzuki I, Yamashita M. Formation and agr-eement problems for synchronous mobile robots with limited visibility // IEEE International Symposium on Intelligent Control. Monterey, 1995: 27–29
[16]Luo S, Kim J, Parasuraman R, et al. Multi-robot rendezvous based on bearing-aided hierarchical trac-king of network topology. Ad Hoc Networks, 2019, 86(4): 131–143
[17]Dong Y, Su Y, Liu Y, et al. An internal model approach for multi-agent rendezvous and connectivity preservation with nonlinear dynamics. Automatica, 2018, 89(3): 300–307
[18]陶飞, 刘蔚然, 刘检华, 等. 数字孪生及其应用探索. 计算机集成制造系统, 2018, 24(1): 1–18
[19]张竞涛. 数字孪生技术在智能交通应用中的态势与建议. 信息通信技术与政策, 2020(3): 24–28
[20]Richard C, Nel W, Milton B, et al. Product avatar as digital counterpart of a physical individual product: literature review and implications in an aircraft. Advances in Transdisciplinary Engineering, 2015, 2 (7): 657–665
[21]Tao F, Zhang M. Digital twin shop-floor: a new shop-floor paradigm towards smart manufacturing. IEEE Access, 2017, 5: 20418–20427
[22]Pires F, Cachada A, Barbosa J, et al. Digital twin in industry 4.0: technologies, applications and challen-ges // 2019 IEEE 17th International Conference on Industrial Informatics (INDIN). Helsinki, 2019: 227–234
[23]Kousi N, Gkournelos C, Aivaliotis S, et al. Digital twin for adaptation of robots’ behavior in flexible ro-botic assembly lines. Procedia Manufacturing, 2019, 28: 121–126
[24]Andronas D, Kokotinis G, Makris S. On modelling and handling of flexible materials: a review on digital twins and planning systems. Procedia CIRP, 2021, 97(11): 447–452
[25]Nie Y, Valipour H R. Experimental and numerical study of long-term behaviour of timber-timber com-posite (TTC) connections. Construction and Building Materials, 2021: 124672
Application of Digital Twin Technology to Heterogeneous Traffic Flow Security
Abstract Aiming at the heterogeneous traffic flow composed of connected and autonomous vehicles (CAVs) and human-driving vehicles(HVs), by analyzing the characteristics of different methods for the stability of heterogeneous traffic flow, the urban heterogeneous traffic model is constructed by the digital twin technology, and the safety and stability of complex heterogeneous traffic flow are explored and solved with the help of simulation testing tools. Based on the construction of the heterogeneous traffic flow model framework by the digital twin technology, combined with the operation mechanism of the digital twin, the paper reveals the operation mechanism of the internal physical entity and virtual space of the digital twin. Using the digital twin technology, an abundant test and verification environment is built, and the driverless development software PanoSim is used to test the heterogeneous traffic flow model. The test results show that the digital twin technology can effectively solve the safety problem of heterogeneous traffic flow by constructing virtual complex driving scene under the condition of limited resources.
Key words digital twins; heterogeneous traffic flow; connected and autonomous vehicle; security