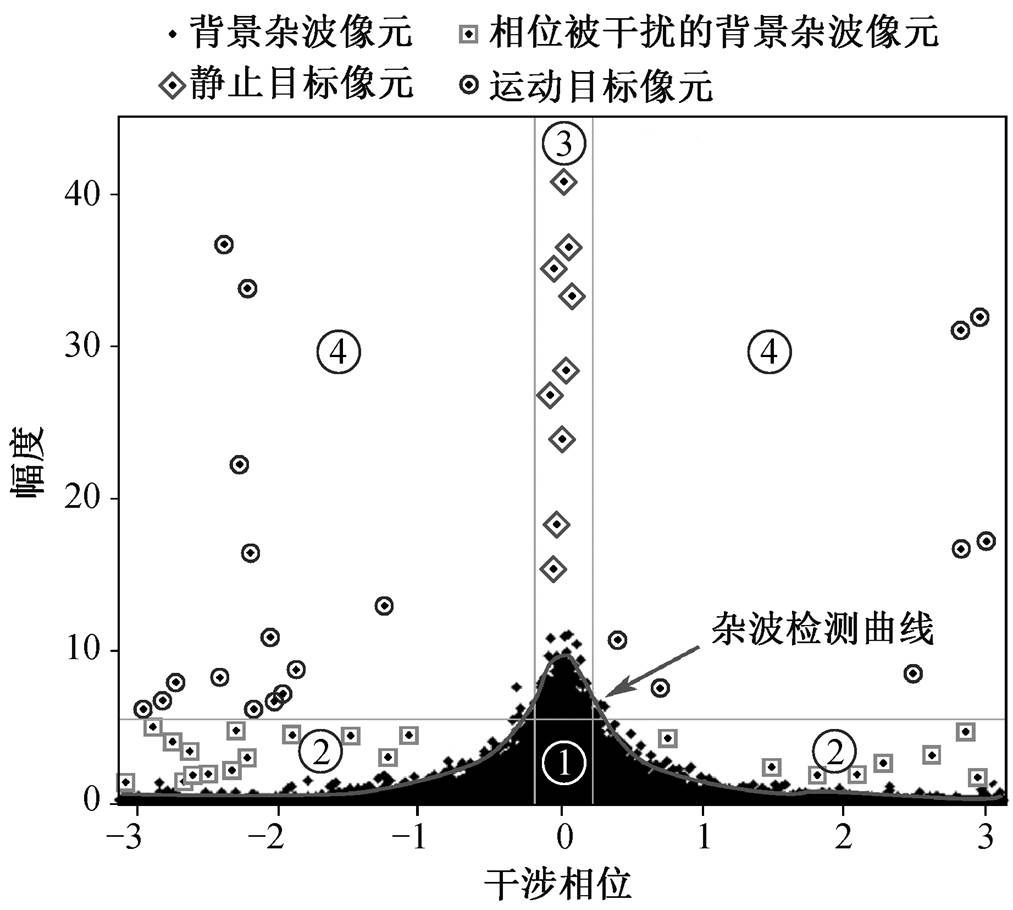
图1 不同地物类型的像元在 M-P 平面上的分布(据文献[10]修改)
Fig. 1 Distribution of different objects in the M-P plane (modified from Ref. [10])
摘要 为检验 TerraSAR-X 数据在地面运动目标检测(GMTI)应用中的潜力, 并验证基于 SAR 沿轨干涉图的幅度和相位联合统计特性以及恒虚警率的检测方法(ATI-CFAR)对 TerraSAR-X 数据的适用性, 利用 TerraSAR-X卫星单发双收模式数据, 基于一种 ATI-CFAR 方法, 结合数据特点进行改进, 对北京北五环部分路段开展GMTI 实验研究。结合地面同步实验进行验证分析, 结果表明: 1)TerraSAR-X 数据能够应用于 GMTI, 但干涉相位受干扰严重, 使用统计的方法确定 ATI 相位阈值易发生过度估计, 导致大量漏检; 2)基于车速先验知识确定相位阈值, 利用图解法确定 ATI 幅度阈值, 能够有效地改善检测结果。本文方法检出率和正确率分别达到 70%和 87.5%, 证明了其对 TerraSAR-X 数据的适用性, 反映出 TerraSAR-X 数据在 GMTI 应用中的潜力。
关键词 地面运动目标检测(GMTI); 合成孔径雷达(SAR); 沿轨干涉(ATI); 恒虚警率(CFAR); TerraSAR-X
利用合成孔径雷达(synthetic aperture radar, SAR)图像进行地面运动目标检测(ground moving target indication, GMTI)是 SAR 技术在军民领域的重要应用之一, 检测的基础在于运动目标与背景杂波之间存在特征差异。SAR 图像为复图像数据, 包含幅度和相位信息, 运动目标与背景特征的差异主要体现在这两方面。由于可检测到的地面运动目标主要为机动车辆, 大多具有金属外壳, 面积虽小, 但雷达后向散射截面积大, 回波强, 在 SAR 图像上表现为幅度高于周围背景像元的强散射目标, 故可以利用单幅或多时相 SAR 图像识别运动目标[1]。从相位的角度看, 从理论上讲, 具有一定速度的地面运动目标经过沿轨干涉(along track interferometry, ATI)处理后, 其干涉相位不为 0, 而静态地物的干涉相位应为 0, 因此利用 ATI 技术可实现地面运动目标检测, 还可以估算目标的运动速度[2]。
然而, 在实际应用中存在着多种影响因素, 单纯依据幅度或相位信息进行运动目标检测存在很大的困难。如成像时的相干斑噪声、天线噪声、传感器观测角度变化以及地表覆盖状态变化等给 SAR图像带来噪声或无意义的变化, 成为单幅或多时相SAR 运动目标变化检测的难点。相位漂移、雷达回波多次散射等因素使得静止背景地物的 ATI 相位受到干扰或“污染”, 导致其干涉相位不为零, 造成运动目标与背景地物的干涉相位混淆, 因此单纯利用ATI 技术难以有效地识别运动目标[3]。此外, 运动目标像元存在散焦现象, 造成其信杂比降低, 更易被背景淹没, 成为不可检测的运动目标[4]。由于具有不同速度的地面运动目标的多普勒频率不同, 其成像位置会发生方位向偏移[4], 原来在低后向散射的均匀的沥青或水泥等道路上的强散射运动车辆, 有可能混入或被淹没在非均匀的背景地物杂波中, 进一步加大地面运动目标检测的难度。另外, 在实际应用中, 地面运动目标的真实速度往往是未知的, 这给检测结果的验证带来困难。
现有的 GMTI 野外实验中, 一般需要在实验车辆上安装角反射器和定位设备等, 在与 SAR 观测同步的行驶中获取所需要的地面数据, 并且要求实验车辆在 SAR 图像上能够被识别。这种方法成本很高, 对实验条件中的行驶道路要求苛刻, 用于机载SAR 实验尚可, 对星载 SAR 的验证几乎不可行。原因之一是以秒计的卫星过境时刻和轨道难以十分精确地预测, 二是很难保证在转瞬即逝的卫星过境时刻实验目标恰好在观测区以设定的速度和方向运动并被成像。总之, 相对于 SAR 的一般目标识别, 星载SAR GMTI更具挑战性, 难度更大。
近年来, 综合运用幅度和相位信息成为动目标检测研究的趋势[5‒6], 其中基于 ATI 干涉图幅度和相位的联合统计特性, 利用恒虚警率(constant false alarm rate, CFAR)进行运动目标检测是一种公认较好的提高检测率的方法(简称 ATI-CFAR 方法)[7‒9]。ATI-CFAR 检测方法分为参量法(parametric method)和非参量法(nonparametric method), 二者的根本区别在于前者需要预知背景杂波的类型, 而后者对杂波类型没有严格的要求。尽管非参量型 CFAR 检测器对杂波的适应性强, 但与之相比, 参量型 ATI-CFAR 检测器性能稳定且可控, 在平稳杂波环境下检测性能较好, 成为目前主流的运动目标检测方法。
中国国防科技大学的学者对参量型 ATI-CFAR方法开展细致的研究[9‒11]。在处理流程上, 与其他ATI-CFAR 检测法相比, 他们增加两个处理环节: 1)在估计杂波分布模型参数之前, 进行粗检测处理, 纯化背景杂波分布; 2)在 ATI-CFAR 检测后, 进行干涉图的幅度和干涉相位的滤波, 用以提高检测的正确率[9‒10]。本文基于这种方法开展进一步的研究, 为阐述简洁起见, 称之为扩展的ATI-CFAR方法。
受限于大部分 SAR 卫星缺少获取 ATI 数据的模式, 基于星载 SAR 数据的 GMTI 研究相对较少。2007 年 6 月和 12 月, TerraSAR-X 和 Radarsat-2 卫星相继发射成功, 两者均具有获取 ATI 数据的能力, 基于星载 SAR 数据的 GMTI 研究才真正展开。但是, 这种数据的接收并没有成为卫星运营的日常业务, 数据获取数量很少, 仅对特定用户开放, 导致相关研究的广度与深度仍然受限。
在这种情况下, 以加拿大国防研究局以及德国宇航局为主的学者们也开展了许多研究, 前者主要采用天线相位中心偏置(DPCA)[12]、ATI-CFAR[6,13]和时空滤波[14]等方法对 Radarsat-2 数据进行 GMTI研究, 他们认为 Radarsat-2 数据在多种地表场景下均表现出较好的运动目标检测能力, 并且, 对于更高分辨率的 SAR 图像, ATI-CFAR 比 DPCA 方法的检测性能更好[12]; 后者对 TerraSAR-X 数据开展的GMTI 研究主要采用 ATI 和 DPCA 方法[15], 很少使用ATI-CFAR方法。
2010 年 6 月, 与 TerraSAR-X 几乎相同的姊妹星 TanDEM-X 发射成功, 二者组成双星系统, 进一步加强 ATI 数据的获取能力。此外, 德国宇航局对全球推出《用于科学研究的 TerraSAR-X/TanDEM-X 数据及其产品的使用》计划, 可为入选用户提供或定制不同模式的数据和产品, 其中包括单发双收模式(dual receive aperture, DRA)的数据, 通过全天线发射信号, 利用沿轨方向分割而成的两个子天线分别接收回波信号, 获得前、后视图像。由于子天线之间几何关系稳定, 成像间隔短, 可以为 GMTI提供较好的 ATI 数据。
本文利用 TerraSAR-X 的 DRA 数据, 以北京城区为研究对象, 开展 GMTI 实验研究, 结合地面实况数据对实验结果进行分析, 从遥感应用的角度检验 TerraSAR-X 卫星的地面运动目标检测能力, 验证扩展的 ATI-CFAR 方法在星载 SAR 数据应用中的适用性。
利用扩展的 ATI-CFAR 方法进行 GMTI 实验, 依据的是运动目标与背景杂波在 ATI 的幅度与相位构成的二维平面(magnitude-phase plane, M-P 平面)上的分布特征差异。这里 ATI 的幅度指进行沿轨干涉的 SAR 主图像与从图像的幅度乘积, 简化起见, 下文中在没有特指的情况下, “幅度”一词均指 ATI的幅度。图 1 是 Gao 等[10]利用双通道模拟 SAR 图像产生的干涉图的二维直方图在 M-P 平面上的投影, 运动目标、静止目标与杂波的分布呈现规律性, 大致可以分为 4 个区域: 区域①为弱散射背景杂波像元, 幅度较小, 相位具有对称性但波动较大, 基本上分布于一条有明显外包络线的区域之内; 区域②为受到一定程度干扰的背景像元, 幅度仍较小, 分布在上述包络线外侧的邻近区域; 区域③为静态但具有较大幅度的强散射目标, 其干涉相位均集中在 0 值附近; 区域④为运动目标, 幅度和相位值均较大, 分布较为分散。
基于以上分布特征, 可以直观地看出, 运动目标检测的关键在于确定 3 个检测阈值: 1)区分运动目标与背景杂波的外包络检测阈值曲线, 简称杂波检测曲线; 2)剔除被干扰杂波的幅度阈值; 3)剔除静态强散射目标的干涉相位阈值。
图1 不同地物类型的像元在 M-P 平面上的分布(据文献[10]修改)
Fig. 1 Distribution of different objects in the M-P plane (modified from Ref. [10])
ATI-CFAR 方法的核心是确定杂波检测曲线, 主要包含两类方法: 非参量型 CFAR 检测和参量型CFAR 检测。前者如加拿大 Chiu 等[6]利用杂波统计直方图拟合的方法获取其外包络线。后者如 Gao 等[10]根据杂波的分布特征确定合适的统计模型, 在给定的虚警概率下计算杂波检测曲线。
与一般的 ATI-CFAR 方法相比较, 扩展的 ATI-CFAR 方法增加了幅度和干涉相位两个阈值的滤波后处理环节, 可进一步提高检测正确率。此外, 为了消除或抑制强散射目标对杂波模型参数估计准确性的影响, 在参数估计前增加粗检测, 或者说是一种杂波纯化处理, 以便得到较为均匀的“纯净”的杂波。Gao 等[10]利用北京市某高速公路附近实验区的机载 X 波段 SAR 干涉数据进行 GMTI 实验, 验证了该方法的有效性。
下面是对 Gao 等[10]的扩展 ATI-CFAR 方法中重要处理环节及所用计算式的归纳, 为了更清晰地表达, 本文对原计算式中某些参量的符号做了修改。
1)杂波纯化处理。利用幅度阈值 剔除强散射像元的方法为
剔除强散射像元的方法为
 , (1)
, (1)式中,  为归一化幅度; P代表概率;
为归一化幅度; P代表概率;  为经验值, 代表杂波像元占整个干涉图的比例,
为经验值, 代表杂波像元占整个干涉图的比例,  [9]。对于给定的, 可以通过直方图统计得到。
[9]。对于给定的, 可以通过直方图统计得到。
2)杂波类型及参数估计。Gao 等[10]的实验区地表覆盖以灌木为主, 其采用的杂波二维联合概率密度函数(probability density function, PDF)如式(2)[10]所示:
 (2)
(2)式中, 为归一化幅度,  ;
;  为干涉相位;
为干涉相位; 和
和 分别为参与干涉的两个 SAR复图像; n 为多视处理的视数;
分别为参与干涉的两个 SAR复图像; n 为多视处理的视数;  为数学期望值;
为数学期望值;  为
为 阶第二类 Bessel函数,
阶第二类 Bessel函数,  为 Gamma 函数;
为 Gamma 函数;  和
和 为待估计的参数, 分别代表
为待估计的参数, 分别代表 和复相关系数的幅度和相角, 并分别对应干涉图的相干性和干涉相位。
和复相关系数的幅度和相角, 并分别对应干涉图的相干性和干涉相位。
3)杂波检测曲线的确定。在静止目标为主的SAR图像杂波中, 出现运动目标是小概率事件, 其二维联合 PDF 的数值较低, 意味着具有较低 PDF值的杂波点很可能被认为是运动目标, 从而产生虚警。对于期望或给定的虚警概率 ,
,
 。 (3)
。 (3)也就是说, 杂波 PDF 值小于阈值 的概率与相同, 对应着该 PDF 分布曲面上的一条等值线, 将其投影到 M-P 平面上, 则为图 1 所示的杂波检测曲线。
的概率与相同, 对应着该 PDF 分布曲面上的一条等值线, 将其投影到 M-P 平面上, 则为图 1 所示的杂波检测曲线。
令 , 对于每个待检测点
, 对于每个待检测点 , 当其位于杂波检测曲线上时, 则满足
, 当其位于杂波检测曲线上时, 则满足 ; 当
; 当 时, 其位于曲线以内, 则判断为静态的杂波点; 当
时, 其位于曲线以内, 则判断为静态的杂波点; 当 时, 其位于曲线以外, 则判断为运动目标点或者虚警的运动目标点。
时, 其位于曲线以外, 则判断为运动目标点或者虚警的运动目标点。
4)后处理中的幅度阈值与干涉相位阈值确定。干涉图的幅度阈值 和干涉相位阈值
和干涉相位阈值 的计算公式如下:
的计算公式如下:
 , (4)
, (4) , (5)
, (5)
式中,  和
和 分别为归一化幅度的平均值和标准差;
分别为归一化幅度的平均值和标准差;  为经验系数, 与运动目标与背景杂波幅度之间的对比度有关, 对比度高则取较大值, 反之取较小值, 其确定具有主观性[10];
为经验系数, 与运动目标与背景杂波幅度之间的对比度有关, 对比度高则取较大值, 反之取较小值, 其确定具有主观性[10];  和
和 分别为干涉相位的平均值和标准差。
分别为干涉相位的平均值和标准差。
我们在针对 TerraSAR-X 数据的 GMTI 实验中发现, 当干涉相位受到较大干扰时, 其标准差有可能很大, 由此确定的偏大, 会导致大量运动目标漏检, 甚至无法检测。因此, 本文提出一种利用先验知识确定干涉相位阈值的方法, 将在 2.4 节详述。
本实验选用北京地区 TerraSAR-X 卫星的 DRA条带模式数据, 相关参数见表 1。综合考虑各种因素, 在北五环路奥林匹克公园附近选择 2000 (方位向) ×3000 (距离向)像元范围为重点研究区域, 对应的实地面积为2.7 km × 3.6 km (图2)。
2015 年 10 月 28 日、11 月 30 日和 12 月 22 日, 我们在北京地区共进行 3 次 TerraSAR-X 卫星升轨过境时刻同步地面实验, 主要目的是获得当时地面车辆的数量和速度等信息。实验中, 在道路上方过街天桥处架设数码摄像机、定位设备和计时器等, 实时记录卫星预测过境时刻前后约 5 分钟内运动车辆的视频数据, 并根据道路分隔标志线、计时数据和视频图像数据等进行车速估算、车辆数量统计和车辆类型识别。本文的检测目标定为北京市奥林匹克公园附近北五环路段从西向东行驶的车辆, 卫星数据为 11 月 30 日的 TerraSAR-X 数据, 在北苑桥和北苑桥东两个地点采集地面实验数据。此外, 从百度公司获得北五环道路相应时间内每分钟的平均车速数据。在与 TerraSAR-X 卫星过境时刻接近的 1分 30 秒时段内, 地面观测到的从西向东行驶的机动车共 73 辆, 主要为小客车、大轿车和大卡车, 速度分布如图 3 所示, 大部分(89%)车辆的速度在 60~80 km/h 范围内, 平均车速约为 71km/h; 同时段百度数据中该路段车辆平均速度为 68km/h, 二者之差为3 km/h, 吻合度较好。
表1 实验相关的TerraSAR-X参数
Table 1 TerraSAR-X parameters related to the experiment

类别参数参数值 卫星轨道倾角97.4° 升/降轨升轨 高度514.8 km 传感器波长3.2 cm 频率9.65 GHz 速度7063.8 m/s 有效沿轨基线长度1.2 m 天线尺寸4.78 m (长) × 0.7 m (宽) SAR图像图像数量3幅(前天线SLC图像, 后天线SLC图像, 全天线SLC图像) 数据类型已配准的单视复图像(Coregistered single look slant range complex, CoSSC) 像元大小1.8 m (方位向) × 0.9 m (距离向) 成像时刻北京时间2015年11月30日18时 04分29秒

图2 研究区域全天线SAR 图像
Fig. 2 Full-antenna SAR image including detection target area
为了检测效率, 依据运动目标在 SAR 成像时存在的方位向偏移现象, 在进行数据处理前, 先确定运动目标出现的可能区域, 即检测靶区。偏移量 计算方法[4]如下:
计算方法[4]如下:
 为斜距向距离,
为斜距向距离,  和
和 分别为地面目标在雷达波视线方向的速度分量和地面速度,
分别为地面目标在雷达波视线方向的速度分量和地面速度,  为卫星飞行速度,
为卫星飞行速度,  为波束入射角,
为波束入射角, 为与距离向的夹角。
为与距离向的夹角。
根据速度与方位向偏移量的关系及卫星飞行方向, 可知目标路段上运动目标的真实成像位置位于北五环南侧的奥林匹克公园内。公园地面覆盖类型以林地、草地和水域为主, 间或分散着零星的房屋和路灯等人工建筑, 背景相对均匀。结合百度交通数据、地面同步实验数据及北五环法定限速信息, 可知目标路段成像时刻车速范围在 50~90km/h 之间, 代入式(6), 算得对应的为 560~1008m, 由此确定检测靶区(图 2), 其范围为 270 (方位向)×300 (距离向)像元, 对应北五环长度约为 495m 的路段。
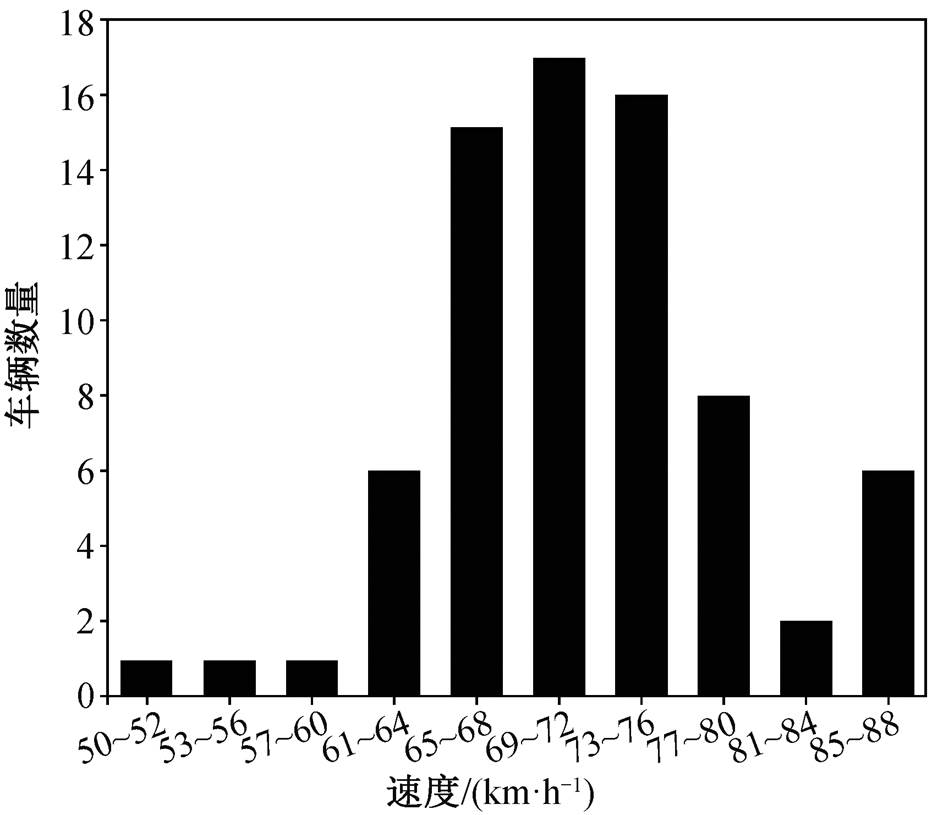
图3 2015年11月30日地面同步实验获取的车辆速度及数量
Fig. 3 Vehicle velocity and number obtained by the synch-ronous in-situ experiment on Nov. 30, 2015
根据 TerraSAR-X 数据的特点, 本文在确定幅度和干涉相位检测阈值时, 采取与扩展 ATI-CFAR方法不同的思路, 详述如下。
1)杂波纯化处理中幅度阈值确定。式(1)中的为经验值, 在实际工作中较难确定, 具有一定程度的主观性。本文结合检测靶区的实际情况, 采用图解分析法, 直观地确定。如图 4 所示, 根据检测靶区实际数据绘制检测出的像元占比曲线, 横坐标为幅度阈值( ), 纵坐标为幅度值大于的像元占全图像的比例(
), 纵坐标为幅度值大于的像元占全图像的比例( )。由于强散射目标像元很少且幅度值大, 而背景像元很多且幅度值小, 当
)。由于强散射目标像元很少且幅度值大, 而背景像元很多且幅度值小, 当 曲线展现出较明显的拐点并趋于平稳时, 到达背景像元幅度值的临界点, 其对应的即为强散射像元占整个图像的比例, 从而得到
曲线展现出较明显的拐点并趋于平稳时, 到达背景像元幅度值的临界点, 其对应的即为强散射像元占整个图像的比例, 从而得到 。
。
由于 TerraSAR-X 卫星 DRA 模式能同时获得全天线和子天线图像, 并且全天线图像信噪比大于子天线图像, 能更准确地反映相同地表强散射像元及弱背景杂波的比例, 因此在杂波纯化处理操作中, 首先利用全天线幅度图估算出, 再根据式(1)计算子图像干涉图对应的幅度阈值。
2)后处理过程中幅度阀值Tm与相位阈值Tp的确定。上述通过杂波纯化处理确定幅度阈值的目的是去除强散射像元, 以便获得背景更均匀的杂波分布, 而这里确定幅度阈值的目的是去除弱散射背景像元。二者目的不同, 但本质上都是将强、弱散射像元区分开。因此, 这里可取幅度阈值 Tm=Tg,避免因经验系数带来的不确定性。
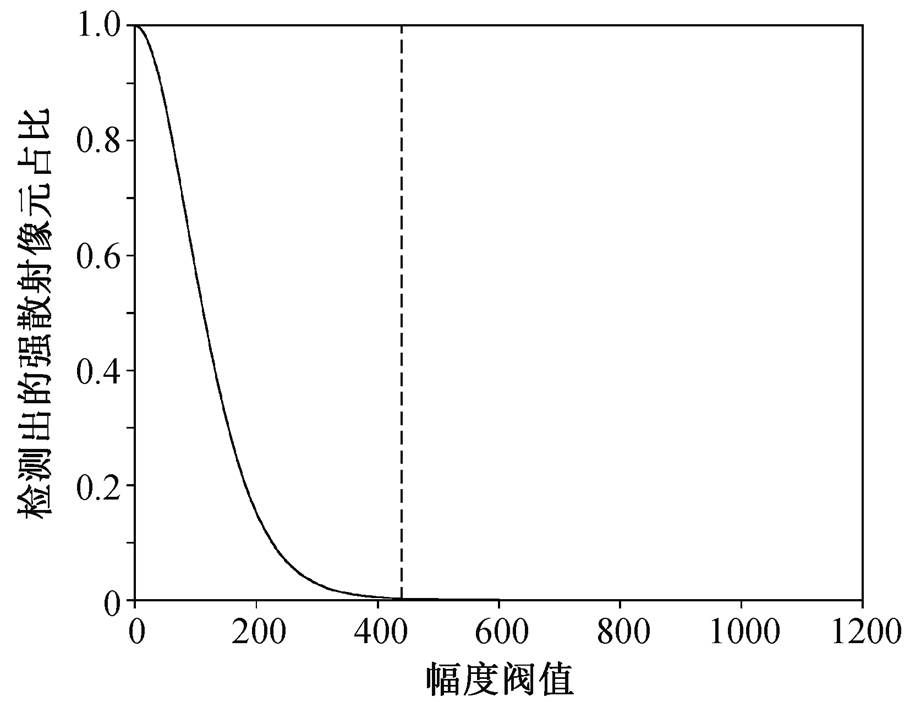
图4 检测出的强散射像元占比与幅度阈值的关系
Fig. 4 Percentage of the detected strong-scattering pixels vs. amplitude threshold
如前所述, 对于干涉相位阈值的确定, 如果直接采用式(5)计算本文实验数据, 干涉相位阈值偏大, 会造成运动目标漏检(详见 3.2 节的实验结果)。因此, 本文提出利用式(7)并结合车辆速度先验知识的方法来更精确地确定干涉相位阈值, 即基于先验知识确定最小检测车速, 代入式(7)计算相位阈值。速度的先验知识可来自交通管理部门对道路的电子监控数据、道路限速规定以及从事地图导航的企业积淀的交通大数据等。
 , (7)
, (7) 为干涉相位,
为干涉相位,  为有效沿轨基线长度, λ 为SAR 的波长,
为有效沿轨基线长度, λ 为SAR 的波长,  代表
代表 个
个![]() 缠绕[16]。通过计算, 可知车辆速度的缠绕周期为 730 km/h, 由于本文研究对象的速度远远小于此值, 故不考虑缠绕问题。
缠绕[16]。通过计算, 可知车辆速度的缠绕周期为 730 km/h, 由于本文研究对象的速度远远小于此值, 故不考虑缠绕问题。
按照上述实验方案, 通过杂波纯化处理得到 , 对应的归一化幅度阈值
, 对应的归一化幅度阈值 。选用式(2)表示的二维联合 PDF 并进行参数估计, 得到
。选用式(2)表示的二维联合 PDF 并进行参数估计, 得到 ,
,  。为避免多视处理造成图像分辨率降低, 本文未做多视处理, 即取
。为避免多视处理造成图像分辨率降低, 本文未做多视处理, 即取 。采用与文献[10]相同的虚警概率(
。采用与文献[10]相同的虚警概率( ), 计算得到杂波检测曲线阈值
), 计算得到杂波检测曲线阈值 。对检测靶区进行检测, 得出候选运动目标的像元数为 678。根据同步地面实验数据, 目标路段不可能存在如此多的车辆, 故可判断检测结果中仍然混杂大量被干扰的杂波像元和静止强散射目标像元, 由此也可直观地理解扩展的 ATI-CFAR 方法增加幅度和干涉相位滤波后处理的必要性。
。对检测靶区进行检测, 得出候选运动目标的像元数为 678。根据同步地面实验数据, 目标路段不可能存在如此多的车辆, 故可判断检测结果中仍然混杂大量被干扰的杂波像元和静止强散射目标像元, 由此也可直观地理解扩展的 ATI-CFAR 方法增加幅度和干涉相位滤波后处理的必要性。
利用式(4)和(5), 即按照 Gao 等[10]的扩展 ATI-CFAR 检测方法, 进一步剔除非运动目标, 归一化幅度和干涉相位的统计信息如表 2 所示, 其中经验系数取与文献[10]相同的数值![]() 。可以看到, 干涉相位均值不为 0, 相位存在较大的干扰; 标准差较高, 干扰因素复杂。这种方法计算得到的相位阈值, 其对应的北五环道路自东向西和自西向东行驶车辆的最小可检测速度应分别为 111km/h 和 148 km/h, 而北五环限速 90km/h, 地面实验也证明该可检测速度明显偏大, 说明干涉相位阈值偏大, 按此干涉相位阈值检测出的运动目标数量为0。
。可以看到, 干涉相位均值不为 0, 相位存在较大的干扰; 标准差较高, 干扰因素复杂。这种方法计算得到的相位阈值, 其对应的北五环道路自东向西和自西向东行驶车辆的最小可检测速度应分别为 111km/h 和 148 km/h, 而北五环限速 90km/h, 地面实验也证明该可检测速度明显偏大, 说明干涉相位阈值偏大, 按此干涉相位阈值检测出的运动目标数量为0。
依据本文提出的确定干涉阈值的改进方法, 首先基于地面同步实验得到的车辆速度, 确定待检目标的最小速度为 50km/h, 然后由式(7)算得对应的相位为 。考虑到对于同等程度的相位干扰, 相对于弱散射背景杂波, 运动车辆作为强散射目标所产生的相位偏移较小且不易确定, 故直接将作为相位阈值, 幅度阈值采用
。考虑到对于同等程度的相位干扰, 相对于弱散射背景杂波, 运动车辆作为强散射目标所产生的相位偏移较小且不易确定, 故直接将作为相位阈值, 幅度阈值采用 , 最终检测出 23 个运动目标对应的像元, 结果如图 5所示。
, 最终检测出 23 个运动目标对应的像元, 结果如图 5所示。
考虑到 SAR 图像上运动目标的旁瓣效应以及部分车辆占据多个像元的可能性, 根据车辆的尺寸与像元大小及像元空间位置的关系, 以4×3的窗口对检测出的像元进行进一步的检测、判断与合并, 最终得到 16 个运动目标(图 6(a)), 经过方位向偏移校正到北五环道路上(图 6(b))。
本文从运动目标检测结果的速度和数量两方面进行验证。
3.3.1 检测结果的速度
由于精确测定 SAR 成像时地面上每个运动车辆的位置和速度非常困难, 且成本很高, 对检测出的运动目标直接验证的难度很大, 故本文采用间接方法。
如前所述, 通过 ATI 相位, 不仅可以计算运动目标的位置, 而且还能计算其速度 。由方位向偏移量也能计算速度, 称为
。由方位向偏移量也能计算速度, 称为 , 前提条件是首先能确定运动目标及其原始位置, 但该方法自身无法回答这些问题。如果将两种方法结合起来, 依据ATI 相位确定的运动目标和位置来计算, 则可通过间接地验证
, 前提条件是首先能确定运动目标及其原始位置, 但该方法自身无法回答这些问题。如果将两种方法结合起来, 依据ATI 相位确定的运动目标和位置来计算, 则可通过间接地验证 。步骤如下: 1)根据检测出的运动目标ATI相位和式(7)计算; 2)根据检测出的目标在 SAR 图像上的位置, 量测出其距北五环路的方位向偏移量, 并根据式(6a)计算; 3)对与进行比较分析。
。步骤如下: 1)根据检测出的运动目标ATI相位和式(7)计算; 2)根据检测出的目标在 SAR 图像上的位置, 量测出其距北五环路的方位向偏移量, 并根据式(6a)计算; 3)对与进行比较分析。
表2 本文方法与文献[10]方法得到的阈值及检测结果对比
Table 2 Thresholds and detection results after applying the methods of this paper and Ref. [10]

阈值确定方法归一化幅度干涉相位/rad检测出的像元数量 均值标准差阈值(Tm)均值标准差阈值(Tp) 文献[10]方法0.901.037.07 (a=6)0.161.13−0.97/1.29 0 本文方法7.78 (a=6)−0.43/0.4323

图5 两种方法的检测结果在M-P平面上的对比
Fig. 5 Detection results in the M-P plane after applying the methods of this paper and Ref. [10]

(a)检测结果的原始位置; (b)经过方位向偏移校正到北五环路上的位置
图6 SAR图像上运动目标检测结果
Fig. 6 Detection results of moving targets in the SAR images
利用两种方法计算得到的检测目标的速度如图 7 所示, 平均速度分别为 ,
, 
 , 二者比较接近, 与地面实验获得的平均速度(71km/h)及百度数据的平均车速(68km/h)亦相符。速度在 60~80km/h 之间的车辆为大多数, 其中占 56%, 占 75%, 与地面实验获得的车速分布规律一致。
, 二者比较接近, 与地面实验获得的平均速度(71km/h)及百度数据的平均车速(68km/h)亦相符。速度在 60~80km/h 之间的车辆为大多数, 其中占 56%, 占 75%, 与地面实验获得的车速分布规律一致。
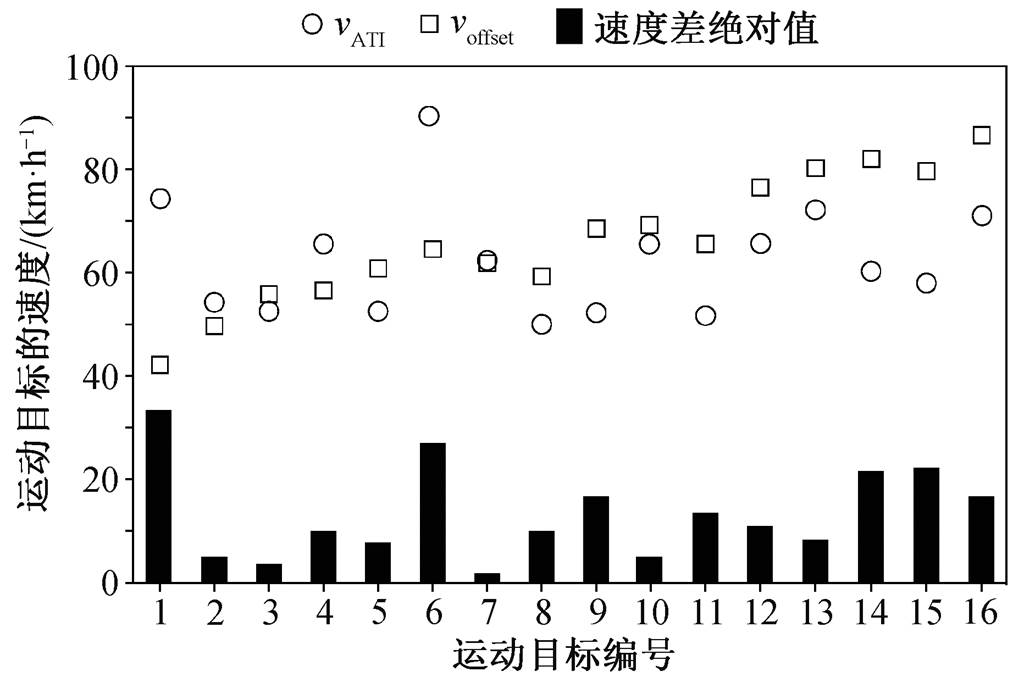
图7 检测出的运动目标的vAT1与voffsef对比
Fig. 7 Comparison between vAT1 and voffset of the detected targets
从图 7 可以看出, 几乎所有目标的与都存在速度差。从与估算误差的角度看, 这种差异是客观存在的。对于估算, 由于 ATI相位的干扰因素复杂多样, 且难以确定和量化, 故本文在估算时无法进行相位干扰校正, 必然带来误差。但是, 通过对背景杂波干涉相位的统计, 可以估计误差的大小。如表 2 中干涉相位均值为 0.16rad, 反映背景杂波干涉相位受干扰的程度, 其对应的约为 18km/h。强散射运动目标的干涉相位受干扰的程度小于背景杂波, 由此估计其产生的误差一般应小于 18km/h。对于估算, 由于无法确定运动目标的原始位置所在的车道, 导致方位向偏移量量测不准确, 由此带来的误差, 在大比例尺百度地图上测得北五环及其辅路的总宽度约为 50 m, 由此产生的方位向偏移量测不确定度约为 25 m, 其对应的误差为2 km/h。综上所述, 检测出的运动目标与存在一定的速度差是合理的, 但一般不应超过20 km/h。
在检测出的 16 个目标中, 有 8 个目标的速度差小于 10km/h, 6 个目标的速度差在 10~22km/h 之间, 两个目标的速度差大于 25km/h。速度差最大的两个目标中, 1 号目标的偏移位置在 50km/h 方位向偏移线以北, 若为北五环路上的运动目标, 其速度应小于 50km/h; 6 号目标的 。1 号和 6号均与地面实验数据不符, 因此可判断它们不是目标路段上的运动目标。这样, 只有 14 个目标的速度差在可接受范围内, 可认为是位于目标路段上的运动目标, 检测结果的正确率为 87.5%。
。1 号和 6号均与地面实验数据不符, 因此可判断它们不是目标路段上的运动目标。这样, 只有 14 个目标的速度差在可接受范围内, 可认为是位于目标路段上的运动目标, 检测结果的正确率为 87.5%。
3.3.2 检测结果的数量分析
设地面同步实验获取的车速、视频观测时间及车辆总数量分别为 v, t和n, t=90s,  辆, 假设SAR 数据获取时刻地面实验观测路段行驶车辆与检测靶区对应的北五环路段(长度设为
辆, 假设SAR 数据获取时刻地面实验观测路段行驶车辆与检测靶区对应的北五环路段(长度设为 )上车辆的分布具有时空相似性, 则此时刻 D 路段上车辆的数量N应为
)上车辆的分布具有时空相似性, 则此时刻 D 路段上车辆的数量N应为
 。 (8)
。 (8)用检测结果中可靠目标的数量除以推算数量, 可得到对应的检出率。在不同速度条件下推算的车辆数量及相应的检出率如表 3 所示, 按平均速度计算, 改进后方法的运动目标检出率在70% 左右。
表3 目标路段运动车辆数量的推算值及检出率
Table 3 Estimated number and detection rate of the vehicles on the target road section
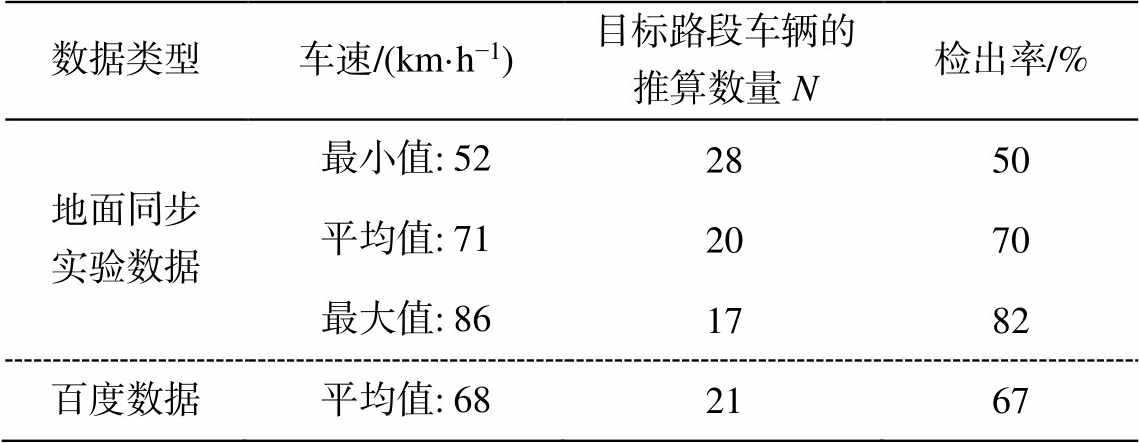
数据类型车速/(km·h−1)目标路段车辆的推算数量N检出率/% 地面同步实验数据最小值: 522850 平均值: 712070 最大值: 861782 百度数据平均值: 682167
依据 TerraSAR-X DRA 数据的 ATI 幅度与干涉相位联合的统计特性, 采用 CFAR 方法, 对北京市北五环的部分路段进行运动目标检测, 可以有效地检测出运动车辆, 并估算出车辆速度。
直接采用 Gao 等[10]的扩展 ATI-CFAR 方法和TerraSAR-X DRA 数据进行地面运动目标检测, 会导致干涉相位阈值估算过大, 无法检测出运动目标, 或者造成大量漏检。因此, 实际应用中需要结合SAR 数据及研究区特点对原方法进行相应的改进。
本文的改进主要体现在以下两个方面: 1)利用道路车速先验知识来确定干涉相位阈值, 减小了相位干扰因素对检测结果的影响, 可以提高检出率, 有效地改善了检测结果; 2)采用全孔径图像强散射像元占比的图解分析方法, 使得 ATI 幅度阈值的确定更加准确和客观。
致谢 TerraSAR-X 数据来自德国宇航局《用于科学研究的 TerraSAR-X/TanDEM-X 数据及其产品的使用》计划(ATI_TRAF6781), 黄俊松、陈继伟、王泽众、章晓洁、范锐彦和韩凯莉同学参与地面同步实验, 在此一并致谢。
参考文献
[1] Kirscht M. Detection and imaging of arbitrarily mo-ving targets with single-channel SAR. IEE Procee-dings — Radar Sonar and Navigation, 2003, 150(1): 7‒11
[2] Moccia A, Rufino G. Spaceborne along-track SAR interferometry: performance analysis and mission scenarios. IEEE Transactions on Aerospace & Elec-tronic Systems, 2001, 37(1): 199‒213
[3] Tian B, Zhu D Y, Zhu Z D. A novel moving target detection approach for dual-channel SAR system. Pro-gress in Electromagnetics Research, 2011, 115(1): 191‒206
[4] Barbarossa S, Farina A. Space-time-frequency proces-sing of synthetic aperture radar signals. IEEE Tran-sactions on Aerospace & Electronic Systems, 1994, 30(2): 341‒358
[5] Shi Gongtao, Zhao Lingjun, Wang Na, et al. A novel dual-SAR detector based on the joint metric of interferogram’s magnitude and phase for slow ground moving targets. Proceedings of SPIE — The Inter-national Society for Optical Engineering, 2009, 7471: 747128-1‒747128-10
[6] Shen C. A constant false alarm rate (CFAR) detector for RADARSAT-2 along-track interferometry. Cana-dian Journal of Remote Sensing, 2005, 31(1): 73‒84
[7] Gierull C H. Statistical analysis of multilook SAR interferograms for CFAR detection of ground moving targets. IEEE Transactions on Geoscience & Remote Sensing, 2004, 42(4): 691‒701
[8] Wang Chenghao, Liao Guisheng, Zhang Qingjun. First spaceborne SAR-GMTI experimental results for the Chinese Gaofen-3 dual-channel SAR sensor. Sen-sors, 2017, doi: 10.3390/s17112683
[9] Gao Gui, Liu Li, Zhao Lingjun, et al. An adaptive and fast CFAR algorithm based on automatic censoring for target detection in high-resolution SAR images. IEEE Transactions on Geoscience & Remote Sensing, 2009, 47(6): 1685‒1697
[10] Gao Gui, Shi Gongtao, Yang Lei, et al. Moving target detection based on the spreading characteristics of SAR interferograms in the magnitude-phase plane. Remote Sensing, 2015, 7(2): 1836‒1854
[11] 时公涛, 高贵, 蒋咏梅, 等. 基于干涉图的双通道合成孔径雷达地面慢动目标检测新方法. 自然科学进展, 2008, 18(5): 559‒572
[12] Chiu S, Livingstone C. A comparison of displaced phase centre antenna and along-track interferometry techniques for RADARSAT-2 ground moving target indication. Canadian Journal of Remote Sensing, 2005, 31(1): 37‒51
[13] Sikaneta I C, Gierull C H. Adaptive CFAR for space-based multichannel SAR–GMTI. IEEE Transactions on Geoscience & Remote Sensing, 2012, 50(12): 5004‒5013
[14] Gierull C H, Sikaneta I C, Cerutti-Maori D. Two-step detector for RADARSAT-2’s experimental GMTI mode. IEEE Transactions on Geoscience & Remote Sensing, 2013, 51(1): 436‒454
[15] Suchandt S, Runge H, Breit H, et al. Automatic extraction of traffic flows using TerraSAR-X along-track interferometry. IEEE Transactions on Geosci-ence and Remote Sensing, 2010, 48(2): 807‒819
[16] Chapin E, Chen C W. Along-track interferometry for ground moving target indication. IEEE Aerospace and Electronic Systems Magazine, 2008, 23(6): 19‒24
Research on Moving Target Indication Based on Along Track Interferometry of TerraSAR-X Data
Abstract The method to combine along track interferometry (ATI) and constant false alarm rate (CFAR) detection, referred to as ATI-CFAR, is considered to be a promising method for ground moving target indication (GMTI). In order to evaluate the ability of the method used for GMTI with TerraSAR-X data, a set of experimental schemes are presented, which include a synchronous in-situ experiment on a section of Beijing’s North Fifth Ring Road, an improved ATI-CFAR method to estimate ATI amplitude and phase,etc. Experimental results suggest that TerraSAR-X data can be used in GMTI, however ATI phase is easily interfered.A published ATI-CFAR method might overestimate the threshold of interferometric phases, and result in missing detection of moving targets. The proposed method based on the priori knowledge of vehicle velocity is able to effectively improve the detection performance, and it improves the detection rate of moving targets in the study area up to 70%, and has an accuracy of 87.5%.The work of this paper validates the availability and potential of TerraSAR-X data in GMTI application.
Key words ground moving target indication (GMTI); synthetic aperture radar (SAR); along track interferometry (ATI); constant false alarm rate (CFAR); TerraSAR-X
doi: 10.13209/j.0479-8023.2019.112
国家自然科学基金(41571337)资助
收稿日期: 2019‒02‒28;
修回日期: 2019‒04‒26