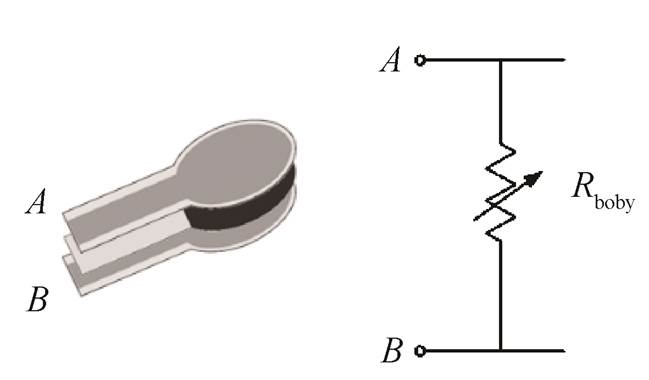
图1 电阻式压力传感器工作原理示意图
Fig. 1 Schematic of the working principle of resistance pressure sensor
王墨 樊卓宸 马浩 彭晨 张思旭 王新安†
北京大学深圳研究生院集成微系统科学工程与应用重点实验室, 深圳 518055; †通信作者, E-mail: anxinwang@pku.edu.cn
摘要为提高足底压力采集的精度, 减少测量中对实验者自然步态的影响, 基于自主研发的平板式传感器, 开发了面向多传感单元的足底压力扫描系统。通过对压力采集系统结构的改进设计以及对采样时序的优化处理, 有效地减少了传感器及电路系统引入的噪声干扰, 实现了对大尺寸(71.9cm×33.5cm)、高空间分辨率(2.8个/cm2, 共6720个传感单元)压力传感系统的设计实验, 实验中采样率为100 SPS。该系统已在广州市第一人民医院康复科进行测试与实验。该系统可应用于步态康复训练, 为医生评估患者康复情况和制订针对性的治疗方案提供有效的量化数据参考。
关键词压阻式传感器; 传感阵列; 足底压力; 传感器标定; 压力图像
足底压力指日常运动活动中人体足部和支撑表面之间作用的压力场[1]。足底压力采集与分析可应用于步行康复训练中, 通过分析患者的步态特征和发力方式, 为医生评估患者康复情况和制订针对性的治疗方案提供有效的量化数据参考[2–3]。
在足底压力采集系统的设计中, 为使实验者尽量按照自然的步态行走, 而不受传感器尺寸的影响, 应尽可能地增大压力感应面积。同时, 为提高压力采集的精度与时间解析度, 对传感系统的空间分辨率和采样率也提出更高的要求。
随着传感单元尺寸的缩小和感应面积的增大, 传感单元数量呈几何倍数增加, 从而增大了信号处理电路设计的复杂度。该复杂度主要体现在对扫描时序的控制和对系统噪声的消除方面。在扫描时序的控制方面, 要求系统在采样时间间隔内完成行/列通道的切换(遍历全部扫描单元)、硬件延时(器件导通关断时间、模拟信号建立及保持时间)、ADC采样和转换以及数据传输等, 这对元件的选择、电路系统的结构设计以及采样时序控制都提出较高的要求。另一方面, 压力传感器及电路系统都会引入噪声干扰, 特别是当传感点阵过多造成扫描切换速度过快时, 各压力传感单元之间的RC网络会引入较大的网络噪声干扰, 影响压力图像显示。在保证采样参数的前提下, 提高感应面积成为相关研究的重要内容。
对于阵列式压力传感系统, 国外研究起步较早, 在传感面积和传感单元密度方面都具领先优势。例如, 比利时RSscan公司的Footscan测力平板产品, 采用压阻式传感器, 有3种不同的传感器尺寸, 最大的传感器面积为146.3cm×32.5cm, 传感器总数为12288个[4]。美国Teckscan公司的Matscan产品, 采用电阻式传感器, 传感面积为43.6cm×36.9cm, 传感器密度为1.4个/cm2, 传感器总数为2288个[5]。
国外的科研机构也在进行压力传感系统的研究。kagami等[6]基于川田工业公司的“H7”机器人开发平台, 开发了应用于仿人机器人步态测量的高速矩阵压力传感器, 传感阵列为32×32, 单个传感器的尺寸为4.2mm×7.0mm。Marenzi等[7]基于DSP TMS320LF2407A, 开发了应用于汽车座椅压力检测的传感系统, 传感阵列为10×10, 传感器尺寸为30 cm×30 cm。
国内对足底压力的研究起步较晚, 目前相关研究多处于原型机验证阶段。袁刚等[8]研制了具有200个电阻式铂金式应变片传感器, 感应面积为30 cm×15 cm的平板式足底压力分布测量系统。张光[9]研制了一款基于SiM3U167的具有2048个压阻传感器的平板式足底压力测量系统, 感应面积为32cm×16cm。郭立泉等[10]提出, 可将4套包含2288个传感单元的压力采集系统合并使用, 以扩展压力图像的采集面积。
本文通过对压力采集系统结构的改进设计以及采样时序的优化处理, 解决大尺寸传感器带来的噪声干扰问题, 实现对大尺寸(71.9cm×33.5cm)、高空间分辨率(2.8个/cm2)压力传感系统的设计。
本文采用电阻式压力传感器进行传感平板的设计。电阻式压力传感器的原理如图1所示。当传感器受到外力时, 导电涂层发生形变, 在被压缩的导电涂层中, 导电颗粒密度增大, 导电涂层导电性能增强, 传感器输出电阻减小。当撤去外力后, 导电涂层形变消失, 涂层恢复原始形状, 导电涂层内导电颗粒密度减小, 导电涂层导电性能减弱, 传感器输出电阻增大[11]。
本文系统采用的传感单元尺寸为5mm×5mm, 感应面积设计为71.9cm×33.5cm, 传感阵列排布为120×56, 共计6720个传感单元。由于传感器单元数目巨大, 且呈阵列式排布, 所以采用行列选择方式, 即传感器阵列中, 同行传感器共用一个行引出导线, 同列传感器共用一个列引出导线, 进行双面布线, 结构如图2所示。
采用该方法, 传感器引线数目将降低至120个行引线和56个列引线。在设计传感平板引线时, 将引线接口设计在传感平板的同侧。为了方便布线以及保持传感平板布线的对称性, 将行引线分别由传感平板的两边引出, 且一侧为奇数列引线, 另一侧为偶数列引线。引线的接口采用柔性电路板(FPC)引线接口方式, 使用排针接口与PCB连接。图3为传感平板接线接口及行列顺序示意图。
图1 电阻式压力传感器工作原理示意图
Fig. 1 Schematic of the working principle of resistance pressure sensor
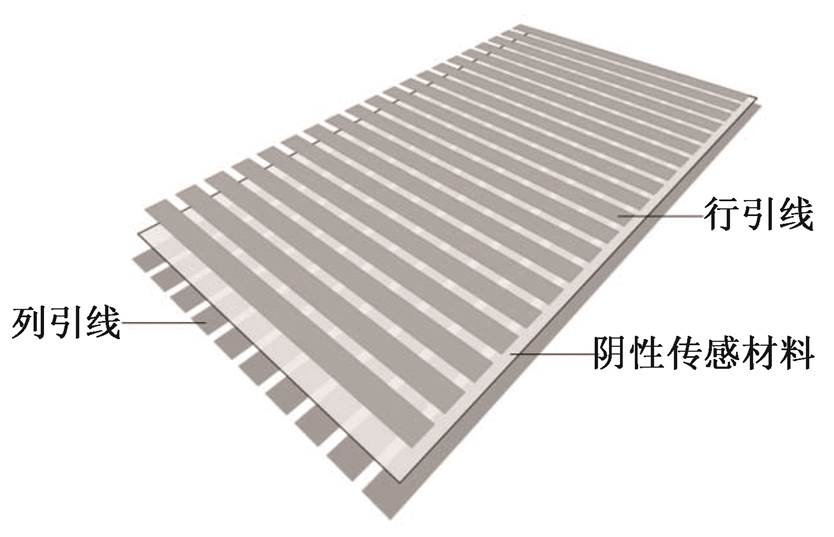
图2 传感平板行列引线方式示意图
Fig. 2 Schematic of the row/column leading way of the sensing pad
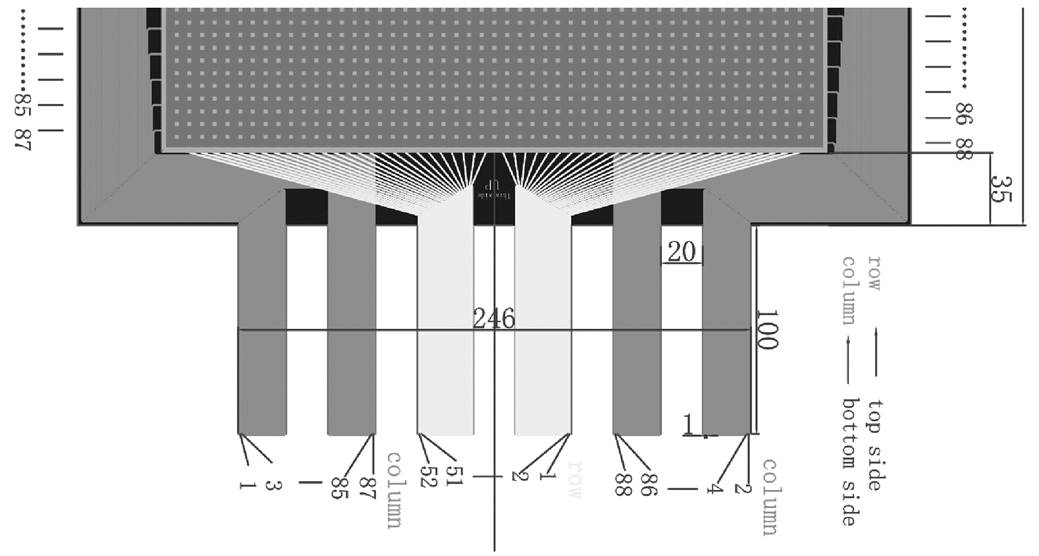
图3 传感平板接线接口及行列顺序示意图
Fig. 3 Schematic of the connection interface of the sensing pad and the row/column sequence
对于电阻式阵列压力传感器, 相邻行列之间的连接除导通电阻外, 还有并联电容的作用[12], 如图4所示。
在传感单元选通时, 并联电容储存电荷, 当切换到另一个传感单元时, 该单元对应的电容电荷需要时间泄放, 泄放时间由电阻电容组成的RC网络确定。
对于电阻式薄膜压力传感器, 并联电容约为500pF。当足底压力作用时, 电阻式传感器的阻值为kΩ量级, 估计时间常数约为
 , (1)
, (1)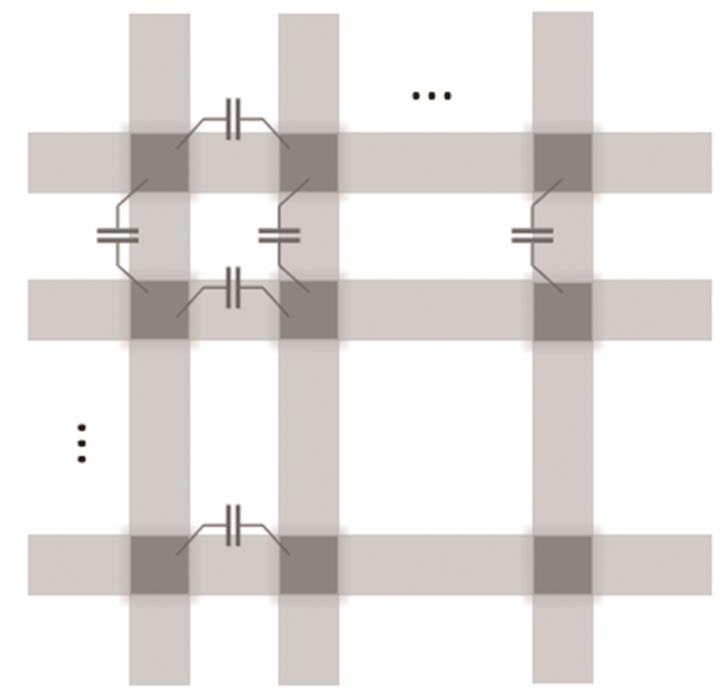
图4 电阻传感网络中的并联电容
Fig. 4 Shunt capacitance in resistor sense network
即切换通道的时间间隔应大于此时间, 才能使并联电容中的电荷及时泄放, 否则会干扰相邻传感通道的数据采集, 引起压力图像模糊、轮廓不清晰等问题。在实际应用中, 为保证图像的清晰显示, 相邻通道切换时间间隔应至少大于10倍时间常数。
本研究基于自主研发的平板式传感器(尺寸为71.9 cm×33.5 cm, 共6720个传感单元), 开发了面向多传感单元的足底压力扫描系统, 其结构如图5所示。
为保证压力图像的时间解析度, 要求系统达到100SPS的采样率, 即在每次采样间隔的10ms时间内完成传感单元的切换(遍历全部传感单元)、硬件延时(器件导通关断时间、模拟信号建立及保持时间)、ADC采样和转换以及数据传输等工作。
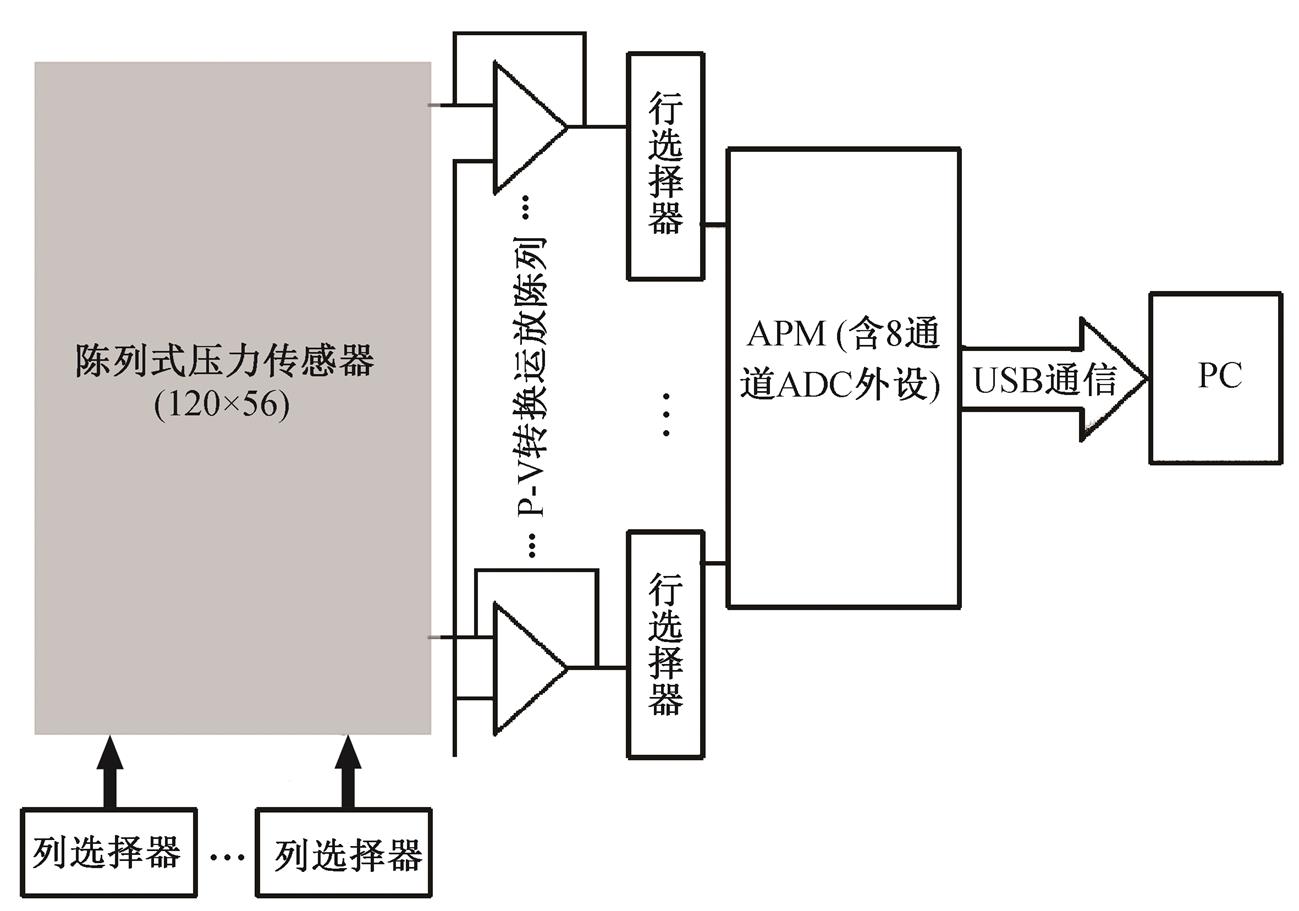
图5 足底压力扫描系统结构图
Fig. 5 Schematic of the plantar pressure scanning system
为了提高列传感器的导通间隔, 在电路结构的行传感器后端, 加入R–V转换运放阵列。每次选通一列, 开启其对应的全部行通道, 并将其电阻值转换为电压值。再通过行选择器, 将电压值依次通入ADC中进行转换。这种结构取消了行传感器的切换过程, 使得每次采样过程只需要对56列传感器进行切换, 所以相邻列通道选通的时间间隔有效地延长至
 。 (2)
。 (2)该时间间隔远大于式(1)计算得到的传感器RC网络的时间常数, 为相邻列通道之间寄生电容的电荷泄放提供了充足的时间。
具体工作过程描述如下。
首先, ARM 控制器通过控制多路模拟选择开关电路, 依次选通列传感器, 将其接入处理电路, 此时, 该列对应的行通道全部开启, 由R–V转换运放阵列将电阻值转换为电压值。
然后, 依次选通行选择器, 将 120 路压力数值依次通入控制器中的 8 路 ADC 中进行采样。
最后, 当对全部传感单元进行一次有效采样后, 控制器对采样数据进行打包, 并通过 USB 与 PC 上的位机通讯来传输本次采样数据。完成数据发送后, 等待下一个系统采样周期开始。
足底压力采集系统样机包括压力传感平板和硬件电路, 如图 6 所示。
为保证传感器件测量的准确性, 需对传感单元进行标定, 标定位置如图 7 所示。
选取传感区域内的 9 个位置, 对传感平板施加0.1~6.0kg/cm2共 10 种不同大小的压强作用, 采集并计算传感单元的平均电阻及平均电导, 得到传感单元电阻、电导与所受压强的关系, 如表 1 所示。
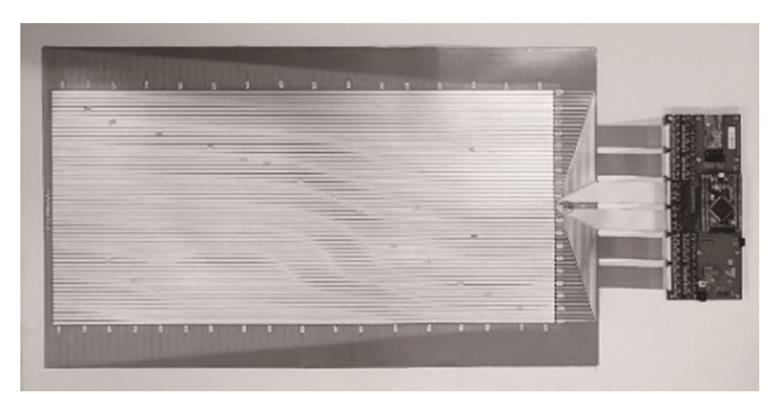
图6 足底压力采集系统样机
Fig. 6 Photo of the plantar pressure acquisition system prototype
根据表 1, 对传感单元所受压强与其电导值关系进行拟合, 如图 8 所示。
通过二项式拟合, 得到传感单元平均电导与所受压强拟合公式为
 , (3)
, (3)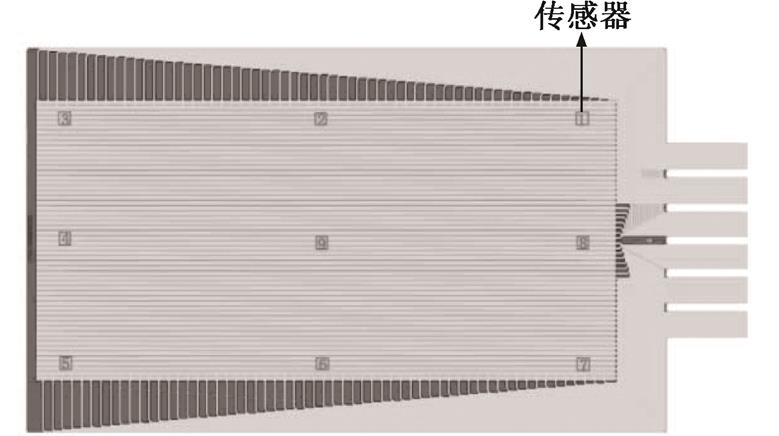
图7 传感器标定位置示意图
Fig. 7 Schematic of the sensor calibration positions
表1 传感单元平均电阻/电导与压强关系
Table 1 Relationship between average resistance/conductance of the sensing unit and the pressure
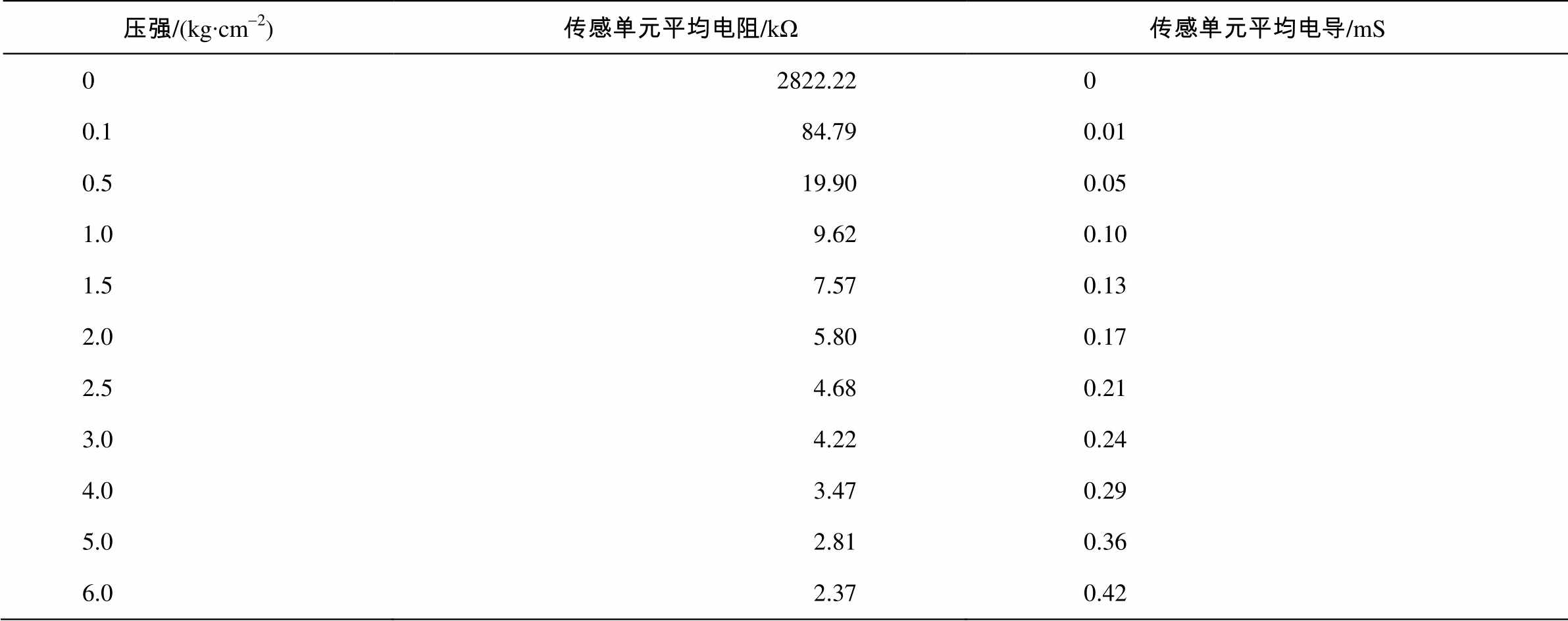
压强/(kg∙cm-2)传感单元平均电阻/kΩ传感单元平均电导/mS 02822.220 0.184.790.01 0.519.900.05 1.09.620.10 1.57.570.13 2.05.800.17 2.54.680.21 3.04.220.24 4.03.470.29 5.02.810.36 6.02.370.42
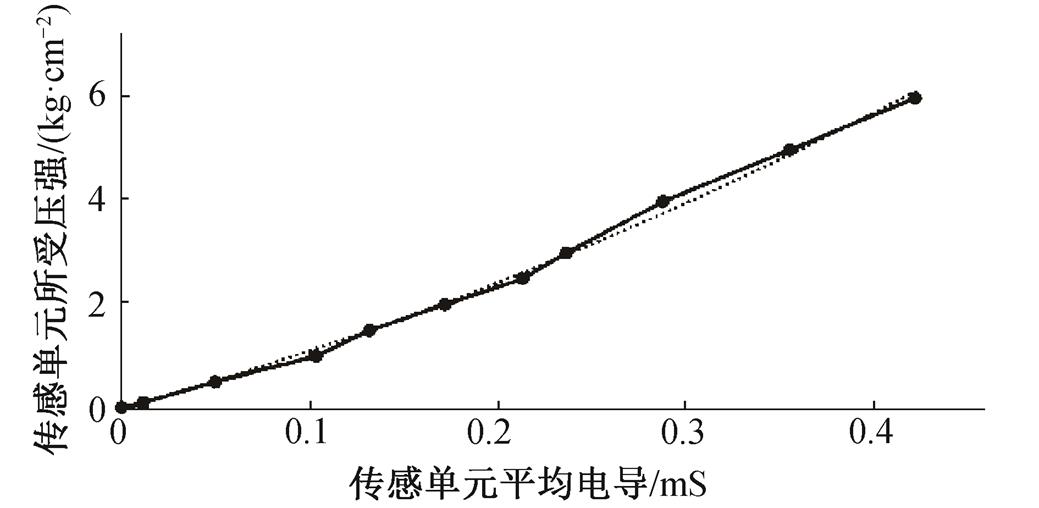
图8 传感单元电导与压强关系拟合图
Fig. 8 Fitting map of the relationship between the sensing unit conductance and the pressure
其中,P为传感单元所受压强;G为传感单元平均电导, 拟合相关系数R2为0.997。
在静态足底压力测试中, 实验者为 24 岁, 体重为 62.1kg, 足长为 25.3cm。测量中要求实验者在传感平板上静止站立 10 秒, 静态足底压力采集图像如图 9 所示。对生成的 1000 帧图像取平均值, 作为其静态足底压力值。
采集 10 组静态足底压力数据, 计算测试数据的均值与标准差, 如表 2 所示。
由表 2 可知, 左脚压力平均值为31.1 kg, 标准差为 0.22kg; 右脚压力平均值为 30.0kg, 标准差为0.26 kg。得到系统变异系数如下:
 , (4)
, (4) 。 (5)
。 (5)
传感系统测量的双脚总压力为60.6kg, 实验者实际体重为62.1 kg, 测量误差为
 。 (6)
。 (6)由变异系数和系统误差参数可以看出, 本文开发的传感系统有较高的可靠性和测量精度。
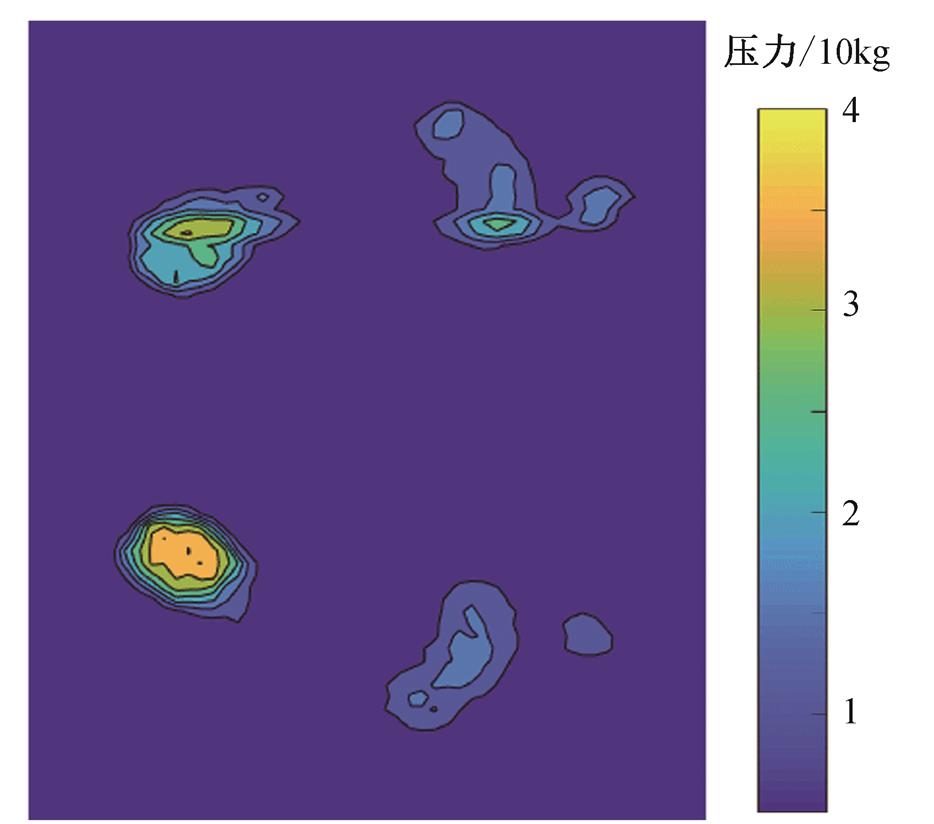
图9 实验者静态足底压力图像
Fig. 9 Static plantar pressure image of the experimenter

图10 足底压力采集系统测试过程
Fig. 10 Photo of the testing process of the plantar pressure acquisition system
表2 静态足底压力测试参数
Table 2 Static plantar pressure test parameters
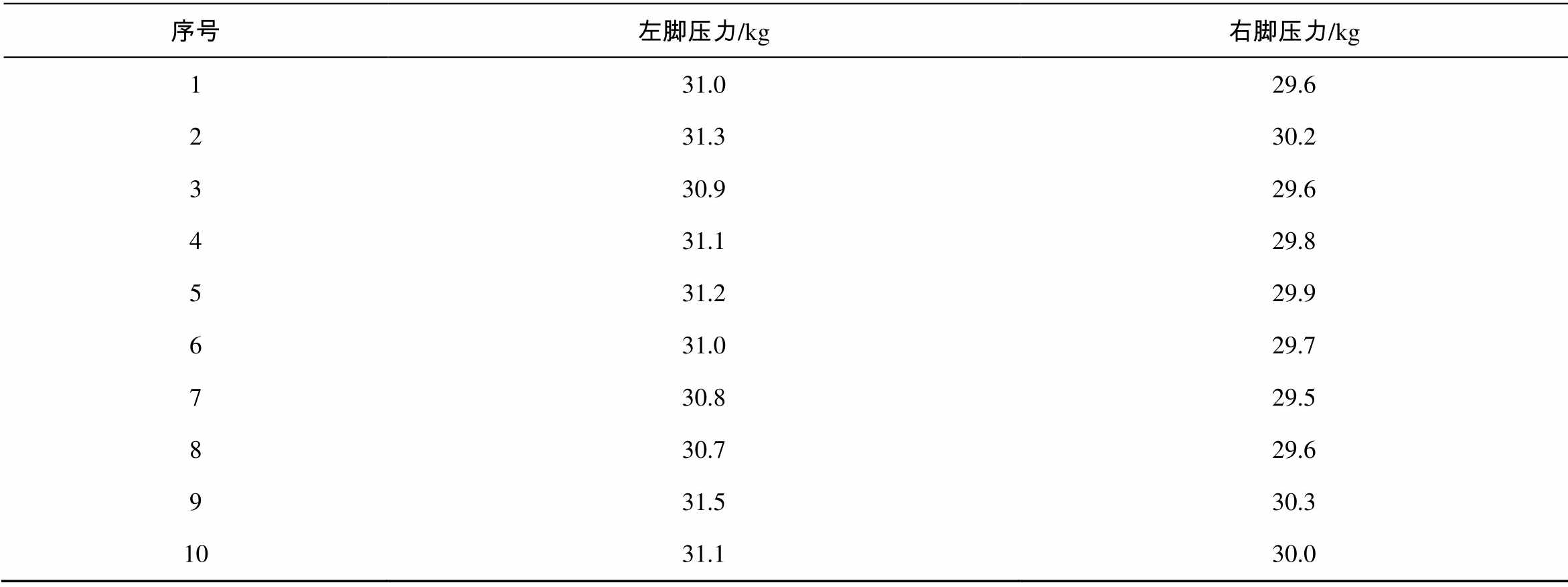
序号左脚压力/kg右脚压力/kg 131.029.6 231.330.2 330.929.6 431.129.8 531.229.9 631.029.7 730.829.5 830.729.6 931.530.3 1031.130.0
在动态测量中, 实验者经由足底压力采集系统往复行走3次, 实验过程如图10所示, 提取其完整运动周期进行分析。
以10帧为间隔, 对实验者行走过程中的足底压力图像序列进行绘图(图11)。从图11中可以清晰地观察到运动过程中的足底压力变化情况: 在步行时单侧足的支撑过程中, 首先为初始着地期, 从足跟着地到足掌着地前, 如图11(a)和(b)所示; 然后为支撑反应期, 从足掌着地到中心移至支撑脚中心前, 如图11(c)和(d)所示; 最后为中点支撑期, 从中点支撑到足跟离地前, 如图11(e)和(f)所示。该过程与图12所示的行走周期中右足支撑早期到支撑中期的过程相对应[13–14]。可以看到, 该足底压力采集系统可以通过采集动态足底压力分布图像序列, 有效地反映步态运动的周期性过程。
表 3 显示, 本文开发的传感系统在传感面积与传感单元数目等方面均达到国内外同类产品领先技术水平。
本文设计开发了一种阵列式足底压力采集系统, 在压力传感单元数量较多, 采样率较高的情况下, 可以有效地减少各压力传感单元之间相互串联电阻与并联电容形成RC网络带来的网络噪声干扰, 较好地完成足底压力图像的采集与显示。通过对传感器的标定, 该系统可以准确地测量足底压力相关参数, 有较高的可靠性和测量精度。通过对动态足底压力图像序列的采集, 可以有效地反映步态运动中足底压力的周期性变化过程。
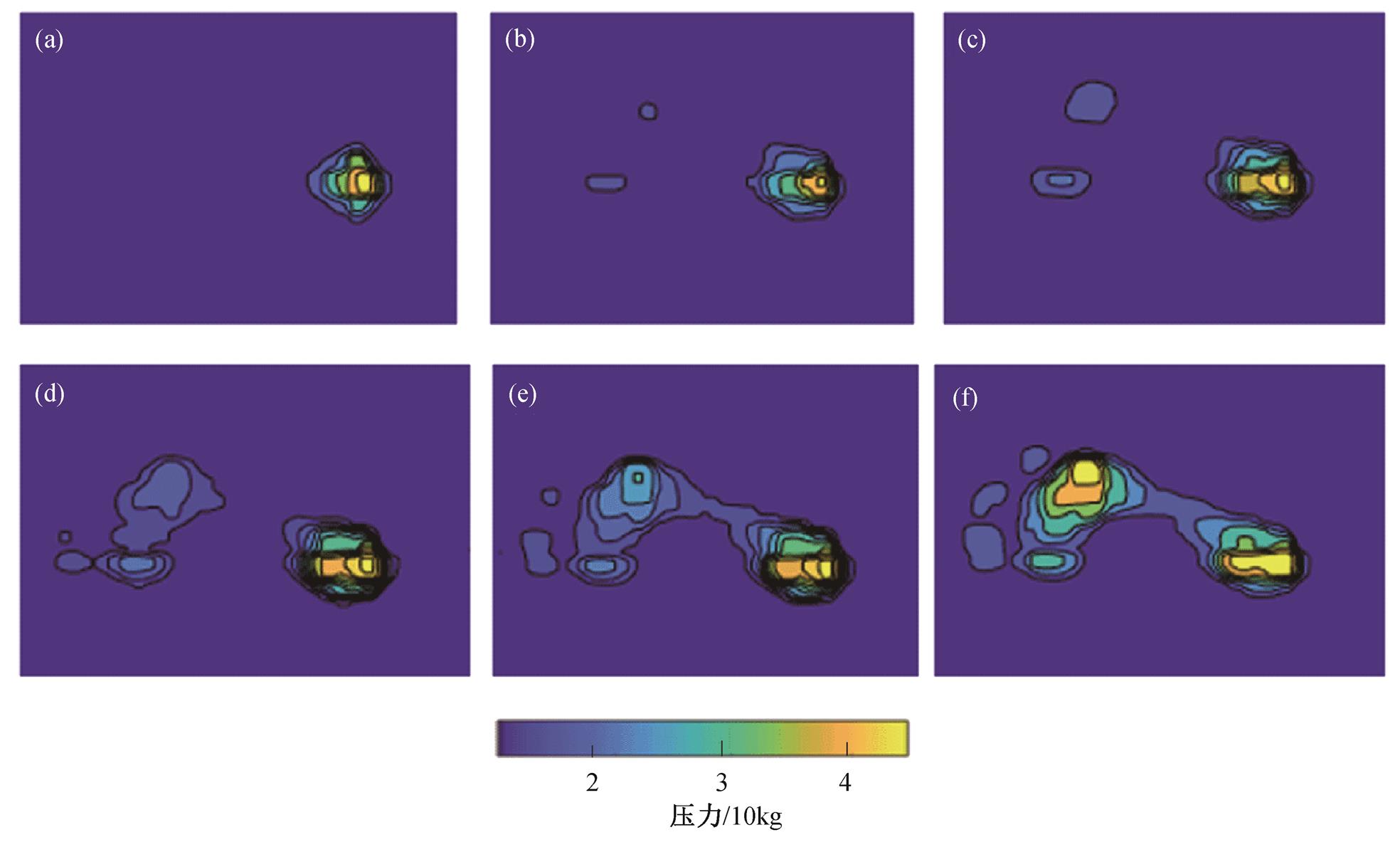
(a)初始着地前期, (b)初始着地后期, (c)支撑反应前期, (d)支撑反应后期, (e)中点支撑前期, (f)中点支撑后期
图11 步行过程中的足底压力图像序列
Fig. 11 Plantar pressure image sequence during walking
表3 本文传感系统与同类产品的参数对比
Table 3 Parameters comparison between proposed system and other similar products

传感系统传感面积传感器数目测量频率/Hz压力量测范围/kPa Rsscan (Footscan公司, 比利时)48.8 cm×32.5 cm/97.5 cm×32.5 cm/146.3 cm×32.5 cm4096/8192/12288300/200/20010~1270 Matscan (Tekscan公司, 美国)43.6 cm×36.9 cm228810010~862 电子科技大学压力采集系统(中国)32.0 cm×16.0 cm2048100- 本文压力采集系统(中国)71.9 cm×33.5 mm672010010~600
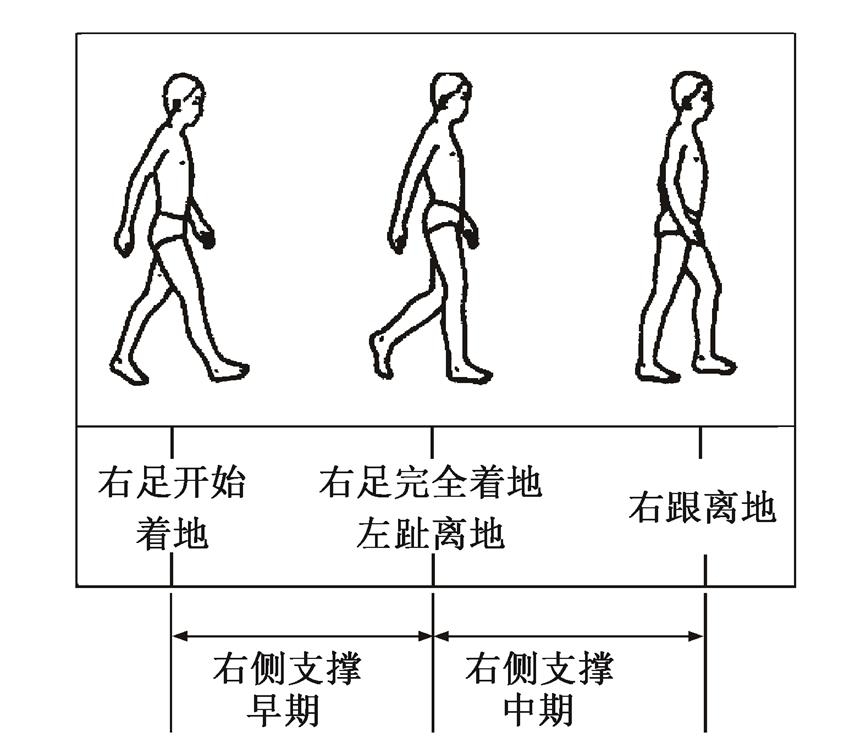
图12 与图像序列相对应的步态周期
Fig. 12 Gait cycle corresponding to the image sequence
该系统的开发为足底压力图像的精细化采集与分析打下了基础。在后续工作中, 我们将继续推动对足底压力特征参数的提取与分析工作, 为临床诊断、康复评定、运动训练等方面的量化分析提供有效的数据参考。
参考文献
[1]Razak A H A, Zayegh A, Begg R K, et al. Foot plantar pressure measurement system: a review. Sensors, 2012, 12(7): 9884–9912
[2]励建安, 孟殿怀. 临床步态分析基础//首届实用康复医学论坛. 南京, 2006: 298–303
[3]岳童, 倪朝民, 刘孟, 等. 脑卒中患者足底压力与步行能力的相关性分析. 中华物理医学与康复杂志, 2015, 37(5): 353–356
[4]Tekscan. MatScan [EB/OL]. (2018) [2018–03–28]. https://www.tekscan.com
[5]RSscan. Entry level systems of RSscan [EB/OL]. (2018) [2018–03–28]. http://www.rsscan.com
[6]Kagami S, Takahashi Y, Nishiwaki K, et al. High-speed matrix pressure sensor for humanoid robot by using thin force sensing resistance rubber sheet. Pro-ceedings of IEEE Sensors, 2004, 3: 1534–1537
[7]Marenzi E, Bertolotti G M, Leporati F, et al. Capa-citive sensors matrix for interface pressure measure-ment in clinical, ergonomic and automotive environ-ments // Euromicro Conference on Digital System Design. Los Alamitos, 2013: 803–806
[8]袁刚, 张木勋, 张建华, 等. 足底压力分布测量系统及临床应用. 中国组织工程研究, 2004, 18(29): 22–25
[9]张光. 研究一款新型专用足底压力检测装置(基于压阻薄膜的足底压力检测仪)[D]. 成都: 电子科技大学, 2013
[10]郭立泉, 王计平, 熊大曦. 平衡评估压力传感阵列的高速数据采集系统设计. 传感器与微系统, 2017, 36(11): 1–3
[11]García-Alonso A, Castaño E, Obieta I, et al. Thin film technology applied to the development of a multilayer pressure sensor device. Vacuum, 1994, 45(10/11): 1103–1105
[12]Lee N K S, Goonetilleke R S, Cheung Y S, et al. A flexible encapsulated MEMS pressure sensor system for biomechanical applications. Microsystem Techno-logies, 2001, 7(2): 55–62
[13]Bayouk J F, Boucher J P, Leroux A. Balance training following stroke: effects of task-oriented exercises with and without altered sensory input. International Journal of Rehabilitation Research, 2006, 29(1): 51–59
[14]宋雅伟, 王占星, 苏杨. 鞋类生物力学原理与应用. 北京: 中国纺织出版社, 2014
Research of Foot Plantar Pressure Scanning System Design Based on Sensor Array
WANG Mo, FAN Zhuochen, MA Hao, PENG Chen, ZHANG Sixu, WANG Xin’an†
The Key Laboratory of Integrated Micro-systems Science and Engineering Applications, Peking University Shenzhen Graduate School, Shenzhen 518055; † Corresponding author, E-mail: anxinwang@pku.edu.cn
AbstractIn order to improve the accuracy of foot plantar pressure acquisition and reduce the influence on the experimenter’s natural gait during the measurement, the improved design of plantar pressure acquisition system and the optimization of sampling timing are proposed, which can effectively reduce the noise interference intro-duced by the sensor and the circuit system, and finally realize the sampling measurement of large size (71.9 cm × 33.5 cm) and high spatial resolution (2.8/cm2, a total of 6720 sensor units) plantar pressure sensing system with the sampling rate of 100 SPS. The system is used to test in the Department of Rehabilitation in Guangzhou First People’s Hospital. The collection and analysis of foot plantar pressure can be applied to the postoperative gait rehabilitation training, providing effective quantitative data reference for doctors to evaluate the rehabilitation of patients and formulate targeted treatment plans.
Key wordsresistive pressure sensors; sensor array; foot plantar pressure; Sensor calibration; pressure image
中图分类号TP212
doi:10.13209/j.0479-8023.2018.072
深圳市基础研究项目(JCYJ20170306092000960)资助
收稿日期:2017-12-01;
修回日期:2018-04-03;
网络出版日期:2018-10-22