 , (1)
, (1)宋继烨1,2 檀望舒1 李成才1,† 于营丽1 李建1 初奕琦1
1.北京大学物理学院大气与海洋科学系, 北京 100871; 2.中国白城兵器试验中心, 白城 137001; †通信作者, E-mail: ccli@pku.edu.cn
摘要 在已有的云识别算法基础上, 利用微脉冲激光雷达后向散射信号区分云和气溶胶。按照云粒子的退偏振比, 区分冰云、水云、混合云以及水平导向的冰晶云。结合大气温度廓线, 对过冷水云层进行有效的识别。利用观测点上空持续一年的观测资料, 统计各种云出现的高度及比例的逐月变化, 结果显示, 过冷水云出现的时间占有云时间的9.84%, 对于0 ~ −40℃的云层, 过冷水云出现的时间占11.99%。
关键词 过冷水云层; 微脉冲激光雷达; 退偏振比; 温度廓线
根据相态, 大气中的云可以大致分为3种类型: 水云(液态)、冰云(固态)以及混合云(混合相态)。温度是云相态判识的重要依据: 云顶温度在 0℃以上的云为水云, 云底温度在−40℃以下的云为冰云, 0~−40℃之间的云可能为水云、冰云或混合云[1]。0℃以下的水云称为过冷水云, 云粒子因为缺乏冰核或其他原因仍然呈现为液态, 状态不稳定。云相态识别是精确评估云辐射强迫的前提, 也是遥感反演云的其他微物理特性参数的必要条件。对过冷水云区的识别, 在提高人工增雨的成功率以及保障航空飞行器飞行安全等方面具有重要意义。
目前对过冷水云的探测, 主要有机载粒子测量系统实地探测、探空资料反演以及微波辐射计、激光雷达、毫米波雷达等主动和被动传感器探测方 法[2]。Hogan 等[3]利用航天飞机携带的激光雷达估计层状云中的过冷水在全球的分布, 发现在−10 ~ −15℃之间的云中有 20%左右含过冷水。Hu 等[4]依据 CALIOP/IIR/MODIS 测量结果, 发现在高纬度地区 0~−40℃之间的低层云中, 过冷水云的比例达到95%。Westbrook 等[5]根据激光雷达及毫米波雷达探测资料, 利用阈值法识别云顶过冷水层。Hogan等[6-7]利用地基激光雷达, 并结合毫米波雷达得到的光学厚度来识别过冷水存在区域, 发现在−10~ −15℃之间有 20%的云中含过冷水。Shupe 等[8-9]利用多种仪器的探测资料, 对混合云的特性进行研 究, 证明液态云的比例随着温度的升高而增大, 总结出识别过冷水的阈值。Luke 等[10]利用毫米波雷达多普勒速度谱的特征来识别过冷水, 结果与云高仪测得的结果一致。国内对过冷水的研究一般采用机载粒子测量系统或结合星载雷达, 如严卫等[11]根据 CloudSat 携带的激光雷达和 94GHz 测云雷达资料, 利用支持向量机法识别出混合相云。但是, 机载仪器探测受时空及飞机飞行的限制, 当星载雷达与云层之间距离过远时, 信号容易受到干扰。在上述对过冷水云的研究中, 有的所用仪器众多, 方法复杂, 有的只研究云顶的过冷水, 有的因时间受限而不能作为长期观测手段。
利用激光雷达探测资料进行云检测, 在星载激光雷达[12]、机载双波长偏振激光雷达[13]和地基激光雷达[14]等方面均有相关研究, 检测方法各有优缺点, 但都采用阈值筛选法, 无论一个阈值还是两个阈值, 检测结果都存在不确定性。随着激光雷达的发展, 利用激光雷达线性体积退偏振比(linear vo-lume depolarization ratio, 简称退偏比)的观测来识别云的相态, 具有时间分辨率高, 探测手段简单易行的优势[15-16]。
本文利用地基微脉冲激光雷达识别过冷水云层, 技术上主要分两步。首先利用激光雷达后向散射信号区分云层和气溶胶层; 然后对检测出来的云层进行相态识别, 再结合探空数据的温度廓线, 鉴别出云层中的过冷水。本文对前人的云识别分类算法做了改进, 并利用改进后的算法对 2016 年 3 月20 日至 2017 年 3 月 19 日北京大学观测点上空出现的云进行识别、分类和统计分析, 取得令人信服的结果。
微脉冲激光雷达(Micro Pulse Lidar, MPL)是20世纪 90 年代美国国家宇航局(NASA)研制的一种人眼安全的探测云和气溶胶的新型激光雷达, 具有激光脉冲能量稳定、重复频率高、信噪比高等优势。本研究采用 SigmaSpace 公司生产的 MPL, 观测点位于北京大学物理楼六层楼顶。该激光雷达的光源为 Nd:YV04 532nm 激光, 脉冲宽度为 10.3ns, 脉冲能量为 6~8μJ, 脉冲频率为 2500Hz。该激光雷达出射线偏振脉冲信号, 同时以光子计数的方式接收与出射激光偏振方向平行和垂直的弹性散射信号, 最大探测高度夜间约为 45km, 白天无云、清洁条件下可达 15km, 垂直分辨率为 15m。该激光雷达接收视场角较小, 接收的后向散射信号以单次散射为主, 因而降低了处理多次散射问题的复杂性, 并在一定程度上减小了太阳光背景噪音的影响。激光雷达接收到的信号强度可以用式(1)表示:
, (1)式中, 是探测器接收到的信号强度, C是系统常数, E 是脉冲能量,
是探测器接收到的信号强度, C是系统常数, E 是脉冲能量, 是重叠区订正因子,
是重叠区订正因子,  是后向散射系数, z 是探测高度,
是后向散射系数, z 是探测高度, 是消光系数,
是消光系数, 是背景噪音,
是背景噪音, 是残余脉冲,
是残余脉冲, 是延时订正函数。对原始信号 p(z) 进行探测器延时订正、残余脉冲订正、背景噪声订正、距离订正和重叠区订正, 并对发射能量进行归一化处理, 可以得到激光雷达归一化后向散射(normalized relative back-scatter)信号NRB(z):
是延时订正函数。对原始信号 p(z) 进行探测器延时订正、残余脉冲订正、背景噪声订正、距离订正和重叠区订正, 并对发射能量进行归一化处理, 可以得到激光雷达归一化后向散射(normalized relative back-scatter)信号NRB(z):
 。 (2)
。 (2)
激光雷达发出的是线偏振光, 遇到各种粒子发生后向散射后, 偏振状态会发生不同程度的改变。激光雷达退偏比 可由下式求得:
可由下式求得:
 , (3)
, (3)其中, 下角标 s 表示与发射光偏振方向垂直的探测通道, 下角标 p 表示与发射光偏振方向平行的探测通道。
利用激光雷达退偏比, 可以识别云的相态。原理是: 云层中的水滴都是球形或近球形的轴对称粒子, 激光雷达发射的线偏振光经过球形粒子和轴对称粒子散射后, 返回的后向散射光偏振状态不发生改变, 即 为零, 因此水云的退偏比很小; 冰晶粒子多为不规则的形状, 返回的后向散射光的偏振状态会发生显著的改变, 即会增加,
为零, 因此水云的退偏比很小; 冰晶粒子多为不规则的形状, 返回的后向散射光的偏振状态会发生显著的改变, 即会增加, 会减小, 因此冰云的退偏比较大。
会减小, 因此冰云的退偏比较大。
背景噪音、仪器观测的随机误差以及低层高浓度气溶胶会导致高层信号信噪比低, 使得很多利用激光雷达探测信号进行云识别的算法都存在错判和误判的情况。Zhao 等[17]提出一种云和气溶胶识别算法, 主要分为 3 个步骤: 1)由于对雷达信号进行距离订正会放大高处的噪音信号, 因此在进行距离订正前, 先对雷达信号进行三点滑动平均以及半离散化处理, 消除随机噪音; 2)用直方图均衡化方法, 判断云层和气溶胶层; 3)选择合适的阈值, 利用定义的特征函数区分云和气溶胶。我们在 Zhao 等[17]算法的基础上, 优化了区分云与气溶胶的方法。下面详细介绍改进后的云识别算法。
未进行距离订正的激光雷达后向散射信号可由式(4)得到:
 。 (4)
。 (4) 虽然去除了背景噪音, 但是信号仍然受测量的随机噪音和大气湍流影响。
虽然去除了背景噪音, 但是信号仍然受测量的随机噪音和大气湍流影响。
计算 15km 以上的标准差 s, 将 5s 作为随机噪音的阈值。首先对 P(z)做三点滑动平均, 得到Ps(z)。然后进行半离散化处理: Ps按照高度递增的顺序, 即 Ps(zi)(i=2, 3, 4, …, N), 如果 Ps(zi)与Ps(zi−1)之差的绝对值小于随机噪音阈值 , 则Ps(zi)=Ps(zi−1), 否则 Ps(zi)保持不变, 将新获得的Ps(z)记为 PD1(z); Ps 按照高度递减的顺序, 即 Ps(zi) (i=N−1, N−2, N−3, …, 1), 如果 Ps(zi)与Ps(zi+1)之差的绝对值小于随机噪音阈值, 则 Ps(zi)=Ps(zi+1), 否则 Ps(zi)保持不变, 新获得的 Ps(z)记为 PD2(z)。将 PD1(z)和 PD2(z)平均, 得到 PD(z)。我们认为, 当信号之间的差异大于噪音水平时, 信号才是有效的。这样, 随机噪音和湍流对信号的影响已经被减到最小, 可以使用 PD(z)作为信号进行云层和气溶胶层的判断。
, 则Ps(zi)=Ps(zi−1), 否则 Ps(zi)保持不变, 将新获得的Ps(z)记为 PD1(z); Ps 按照高度递减的顺序, 即 Ps(zi) (i=N−1, N−2, N−3, …, 1), 如果 Ps(zi)与Ps(zi+1)之差的绝对值小于随机噪音阈值, 则 Ps(zi)=Ps(zi+1), 否则 Ps(zi)保持不变, 新获得的 Ps(z)记为 PD2(z)。将 PD1(z)和 PD2(z)平均, 得到 PD(z)。我们认为, 当信号之间的差异大于噪音水平时, 信号才是有效的。这样, 随机噪音和湍流对信号的影响已经被减到最小, 可以使用 PD(z)作为信号进行云层和气溶胶层的判断。
使用直方图均衡化方法处理信号 PD(z), 判断信号中的云层和气溶胶层。假设每一组信号有 N 个数据, 则 PD(z)可表示为 PD(i)(i=1, 2, 3, …, N)。
1)将 PD(z)进行升序排列, 得到 Rs(i)(i=1, 2, 3, …, N)。排列后, Rs(i)在原序列PD中的位置记为Is(i), 即 Rs(i)=PD(Is(i))。最大值 Rs(N)记为 MA, 最小值Rs(1)记为MI。
2)定义 PE(i)=i/N(i=1, 2, 3, …, N), 如果 Rs(i)= Rs(i−1), 则PE(i)= PE(i−1)。
3) 重新建立一个升序序列 y(i)=PE(i)·(MA−MI)+MI (i=1, 2, 3, …, N)。再将y(i)按照高度排序, 得到直方图均衡化后的信号 PN(z), 即 PN(Is(i))=y(i)(i=1, 2, 3, …, N)。如果整个垂直方向没有云层或气溶胶层出现, 那么 PN 应该随高度 z 的增加而减小。
4)定义基准线 B(z), 两个端点分别为为(z1, MA)和(zN, MI)。理论上, 如果信号中不包含云层或气溶胶层, 信号 P(z)应该随高度的增加而减小, PN(z) 与 B(z)应该相等。如果信号中包含云层或气溶胶层, 就会出现高处的信号大于低处信号的情况, 那么就可以通过 PN(z)与 B(z)的差异区分出云层和气溶胶层。按照高度增加的顺序, 寻找 PN(z)开始大于 B(z)的高度作为一层的起点, 记为 base(ilayer), 将之后 PN(z)小于 B(z)的第一个点作为这一层的终点, 记为top(ilayer), 其中ilayer是垂直高度上分出来的层数。同时, 为了降低随机信号的干扰, 要求每一层的厚度要大于 45 m。这样, 就得到一组信号中云层和气溶胶层的位置。
判断出云层和气溶胶层后, 需要区分云与气溶胶。一般情况下, 云层比气溶胶层出现在更高的位置, 并且云粒子的后向散射比气溶胶层强。这个特征应该体现在云层内的PN与基线B的差异更大。定义 Area(ilayer)为云层内 PN 与 B 围成的归一化面积:
 (5)
(5)考虑到底层大气污染的严重程度也会影响阈值的选取, 我们用归一化后向散射信号的积分 FMX来表征底层大气的污染情况:
 (6)
(6)
最终, 确定新的阈值函数 F:
 。 (7)
。 (7)经过比对大量数据中阈值函数的输出结果, 考虑到不同污染情况及不同高度的差别, 结合人工判断, 我们发现, 可以选取 1000 作为统一的阈值来 区分云与气溶胶, 即当 F>1000 时为云层, 否则为气溶胶层。以 2016 年 3 月 20 日为例, 24小时的激光雷达归一化后向散射信号如图 1 所示。对 2016年 3 月 20 日的雷达信号进行处理, 云识别结果如图2 所示。可以看出, 改进后的算法避免了高空噪音信号的误判以及近地面密度较大气溶胶层的误判, 效果很好, 与人工在图像上对云的识别结果基本上一致。
识别过冷水云的难点主要是云相态的识别。利用退偏比来区分云的相态, 必须要求后向散射信号以单次散射为主。本文采用的激光雷达接收视场较小, 满足收到的信号以单次散射为主, 可以忽略水云多次散射带来的偏振现象。即使考虑了接收到部分多次散射信号, 水云底部退偏比接近 0, 并随厚度增加呈线性增长, 在云顶也不会超过 0.1。下面根据北京市南郊观象台探空数据得到的温度廓线, 找到典型的水云和冰云, 分析其退偏比特征。
图 3 为 2016 年 5 月 14 日 05:00 的温度廓线、退偏比及归一化后向散射信号廓线, 1.6 km 左右的云层所在高度的温度为零上, 可以看出是典型的水云。在云层中观察退偏比的特征, 发现从云底到云顶, 退偏比经历了从大到小、趋近 0、再从小变大的过程。分析其原因, 云底是气溶胶与云接触的位置, 因为气溶胶的存在, 退偏比稍大。在达到最小值后, 随着云层厚度的增加, 激光雷达接收到的信号中有部分来自水云的多次散射, 因此退偏比随高度呈线性地增加, 但也小于0.1, 一般在0.05左右。
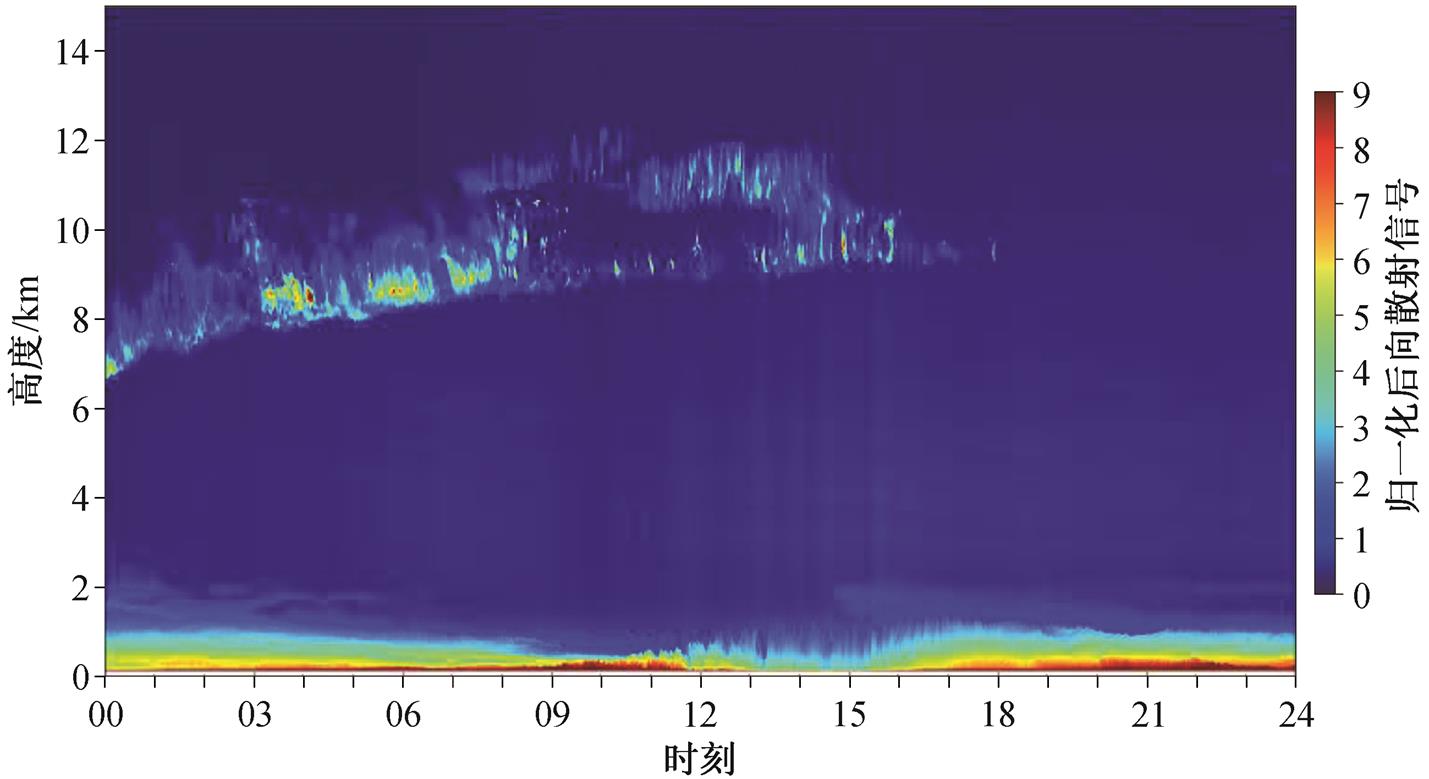
图1 2016年3月20日激光雷达归一化后向散射信号
Fig. 1 Lidar normalized relative backscatter on March 20th, 2016
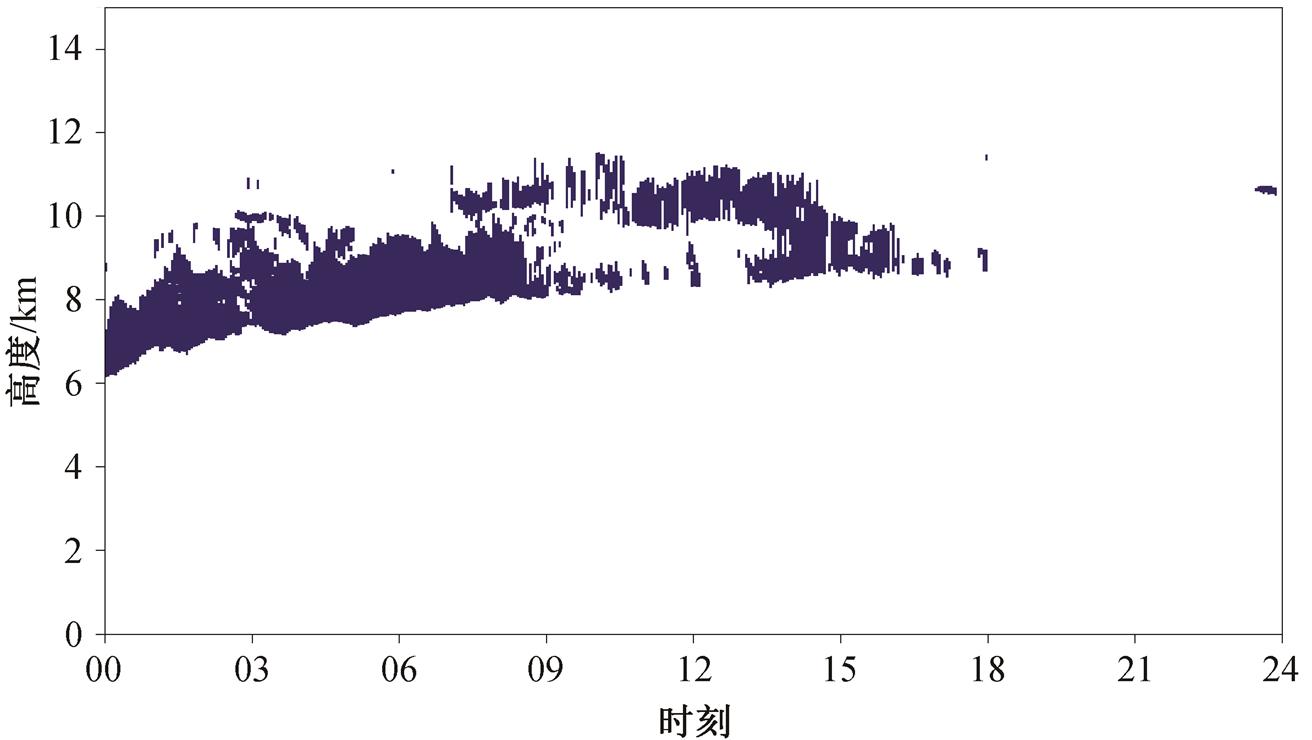
图2 2016年3月20日云检测识别结果(蓝色为云)
Fig. 2 Cloud identification results on March 20th, 2016 (cloud in blue)
再来看一下冰云退偏比的特征。从图 4 中温度廓线看, 7~9km 的云层对应的温度都在−30℃以下, 是典型的冰云, 可以看出在云层所在位置, 退偏比有显著的变化, 普遍大于 0.3。
冰云中有一种特殊的云, 云中的冰晶是固定取向的水平片状冰晶。水平导向片状冰晶的后向散射信号很强, 而且偏振状态不发生改变, 情况与水云相似。与水云不同, 水平冰晶的退偏比虽然很小, 但没有趋近零的趋势, 是不均匀的, 也非单调的, 不会随着云层厚度的增加而呈线性变化(图 5)。
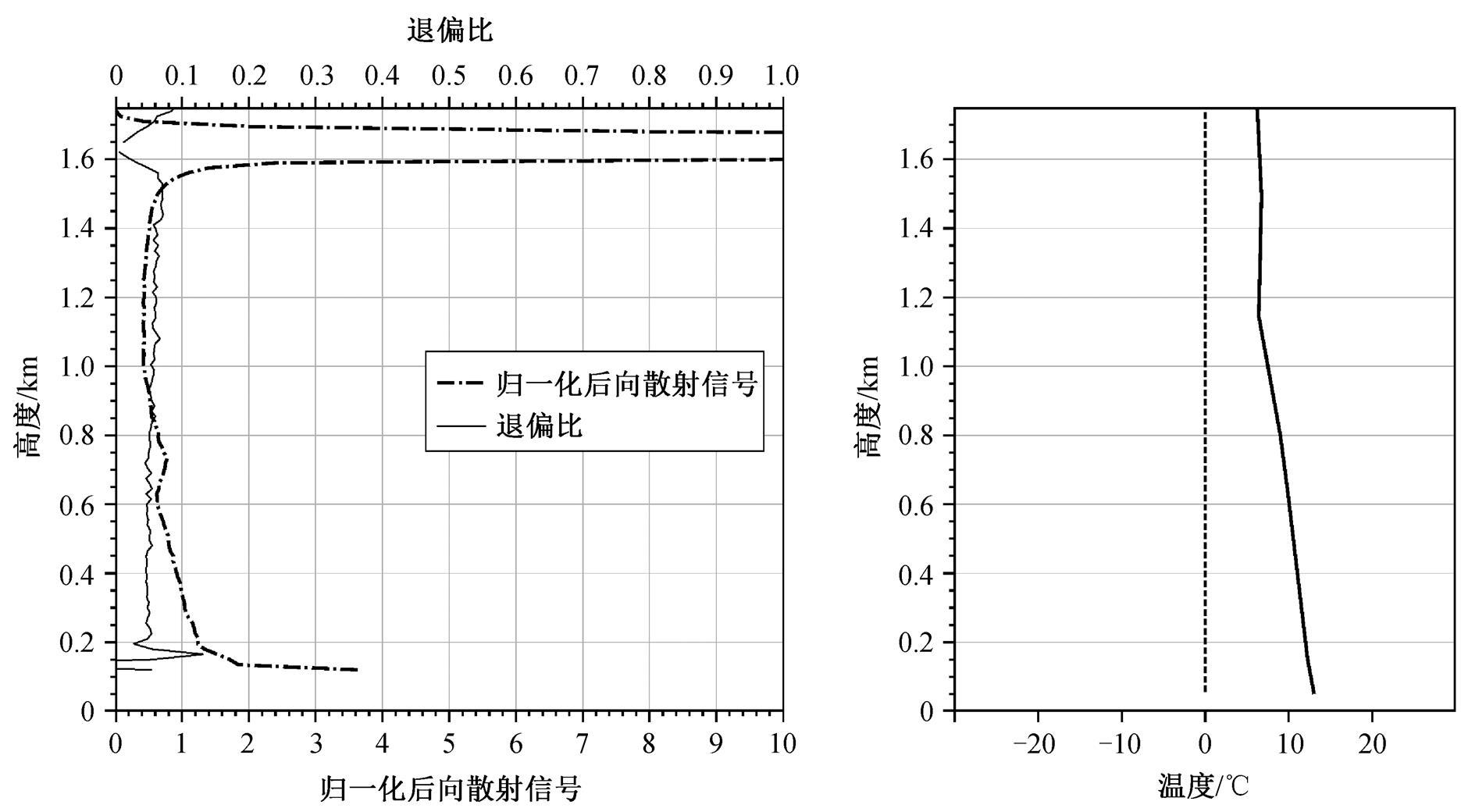
图3 典型水云的退偏比变化特征(2016年5月14日05:00)
Fig. 3 Typical depolarization raito of water cloud (2016-05-14 05:00)

图4 典型冰云的退偏比变化特征(2016年3月20日04:00)
Fig. 4 Typical depolarization raito of ice cloud (2016-03-20 04:00)
因此, 结合退偏比以及温度廓线, 可以判断云的类型。温度在 0℃以下, 退偏比大于 0.3 的是颗粒状冰云; 温度在 0℃以下, 退偏比在 0.05~0.3 之间的是混合相态云; 退偏比小于 0.05, 从云底到云顶, 退偏比先减小后线性增加的是水云, 水云中温度在 0℃以下的则为过冷水云; 温度在 0℃以下, 退偏比小于 0.05, 从云底往上, 退偏比没有线性增长趋势的是水平导向的片状冰晶云。
以 2016 年 5 月 4 日的激光雷达数据为例展示分类结果。结合激光雷达的归一化后向散射信号(图 6)、退偏比(图 7)和云分类结果(图 8)可以看出, 10:30开始出现后向散射信号比较强的厚云层, 退偏比数值较小, 分析其变化特征后, 确定为水平导向的片状冰晶。13:30 左右退偏比发生变化, 其间夹杂过冷水、混和云及冰云, 14:00—15:00 的云层主要是冰云。从 15:00 到 20:30 左右, 云层不稳定, 各种云都有, 18:30 左右有短暂的降水。从 20:30 直到 24:00, 有一层后向散射信号较强的云层, 从退偏比变化特征来看, 主要是过冷水云层。
结合退偏比信号特征和温度廓线, 可以将已经得到的云检测图划分为五类: 0℃以上的水云、随机导向颗粒状的冰云、混合云、水平导向的片状冰晶以及过冷水云(图 8)。只有在比较复杂的天气情况下, 五类云才会出现在一张云图里, 出现各类云夹杂的情况。当然, 也可能存在误判的情况, 主要是水平导向的片状冰晶与过冷水云相似度太高, 分类算法不够完善所致。
北京大学物理楼六层楼顶的微脉冲激光雷达于2016 年 3 月 20 日调试完毕, 正式启用。本文统计了 2016 年 3 月 20 日至 2017 年 3 月 19 日为期一年的数据, 有效数据总时间为 344 天 5 小时 12 分钟。其中, 有云的时间为 151 天 12 小时 6 分钟; 有 0℃以上水云的时间为 41 天 2 小时 6 分钟, 平均高度为2.72km; 有随机导向颗粒状的冰云的时间为 89 天21 小时 24 分钟, 平均高度为 8.03km; 有混合云的时间为 116 天 12 小时 24 分钟, 平均高度为 6.52 km; 有水平导向的片状冰晶云(水平冰)的时间为 21天 6 小时, 平均高度为 4.62km; 有过冷水云的时间为 14 天 21 小时 48 分钟, 平均高度为 4.90km。过冷水云出现的时间占有云时间的比例为 9.84%; 对于全部 0~−40℃的云, 过冷水云出现的时间占比为11.99%。
各种类型云层的月平均高度变化趋势如图 9 所示。3 月的数据是 2016 年 3 月下旬的数据与 2017年 3 月上中旬的数据拼到一起的, 因此在变化趋势上不具代表性。结果表明, 水云的平均高度是所有类型云层中最低的。冰云的月平均高度最高, 然后是混合云, 水平冰和过冷水云的月平均高度位于中间且不分上下。各云层平均高度的年变化趋势都与温度正相关。
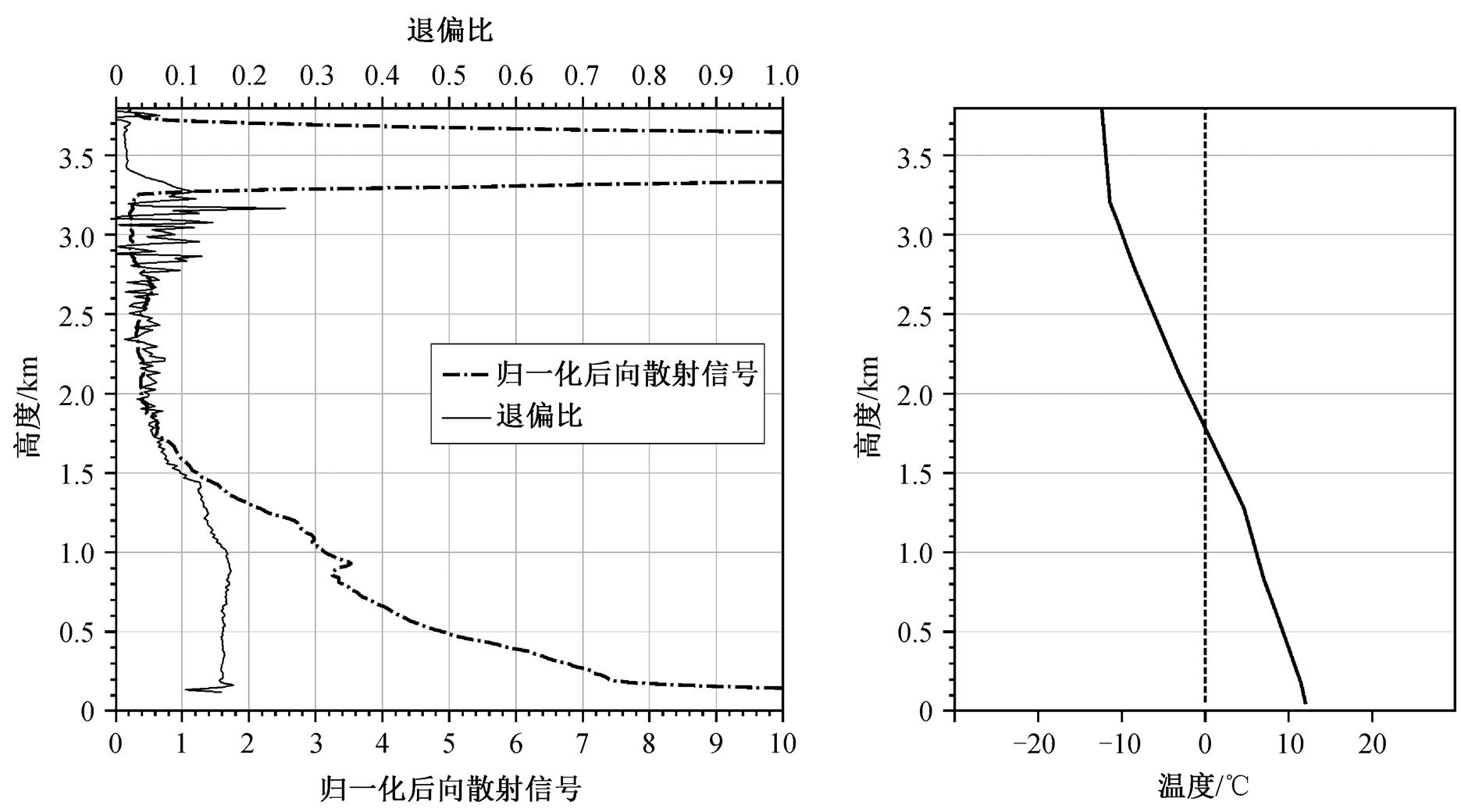
图5 水平导向的片状冰晶退偏比的变化特征(2016年3月22日16:00)
Fig. 5 Depolarization raito of horizontal oriented ice flakes (2016-03-22 16:00)
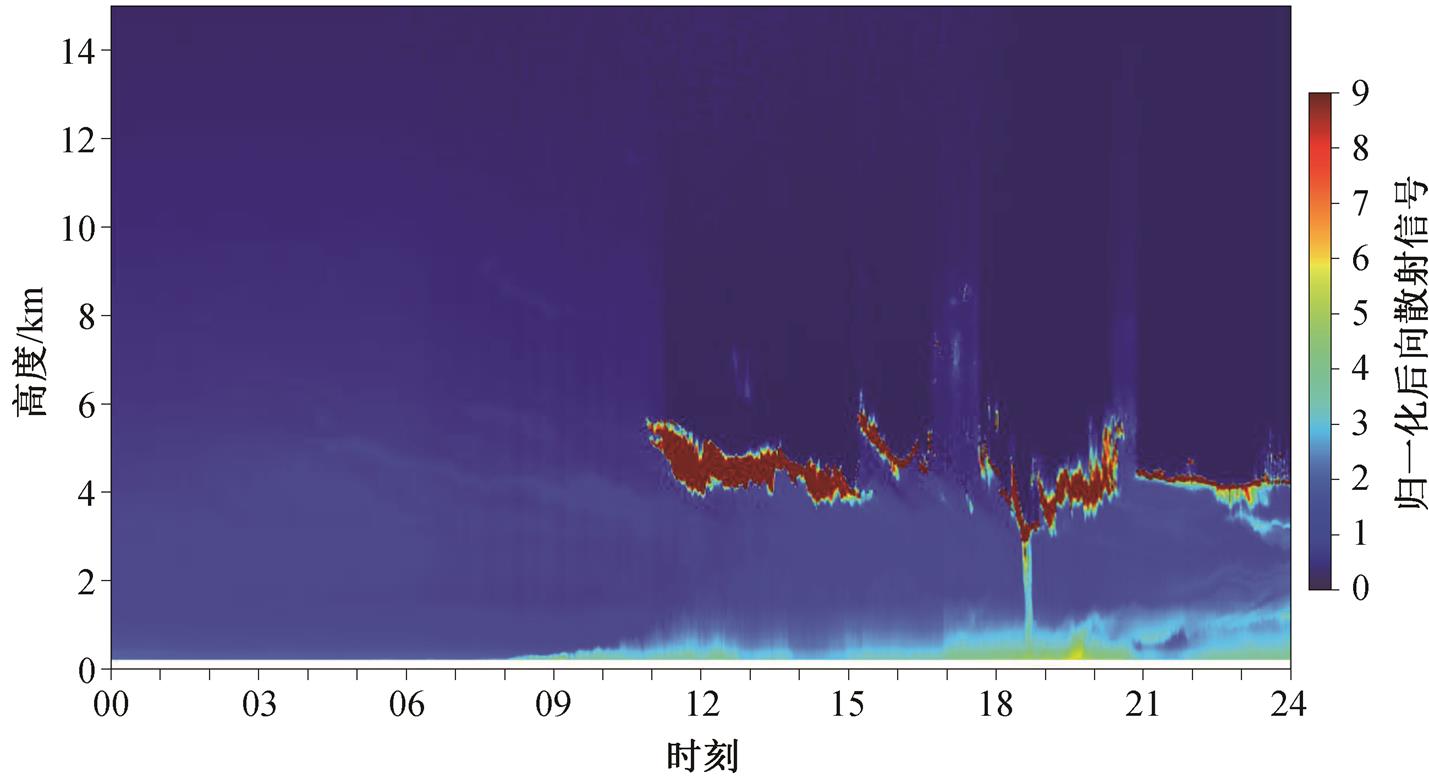
图6 激光雷达归一化后向散射信号(2016年5月4日)
Fig. 6 Lidar normalized relative backscatter on May 4th, 2016
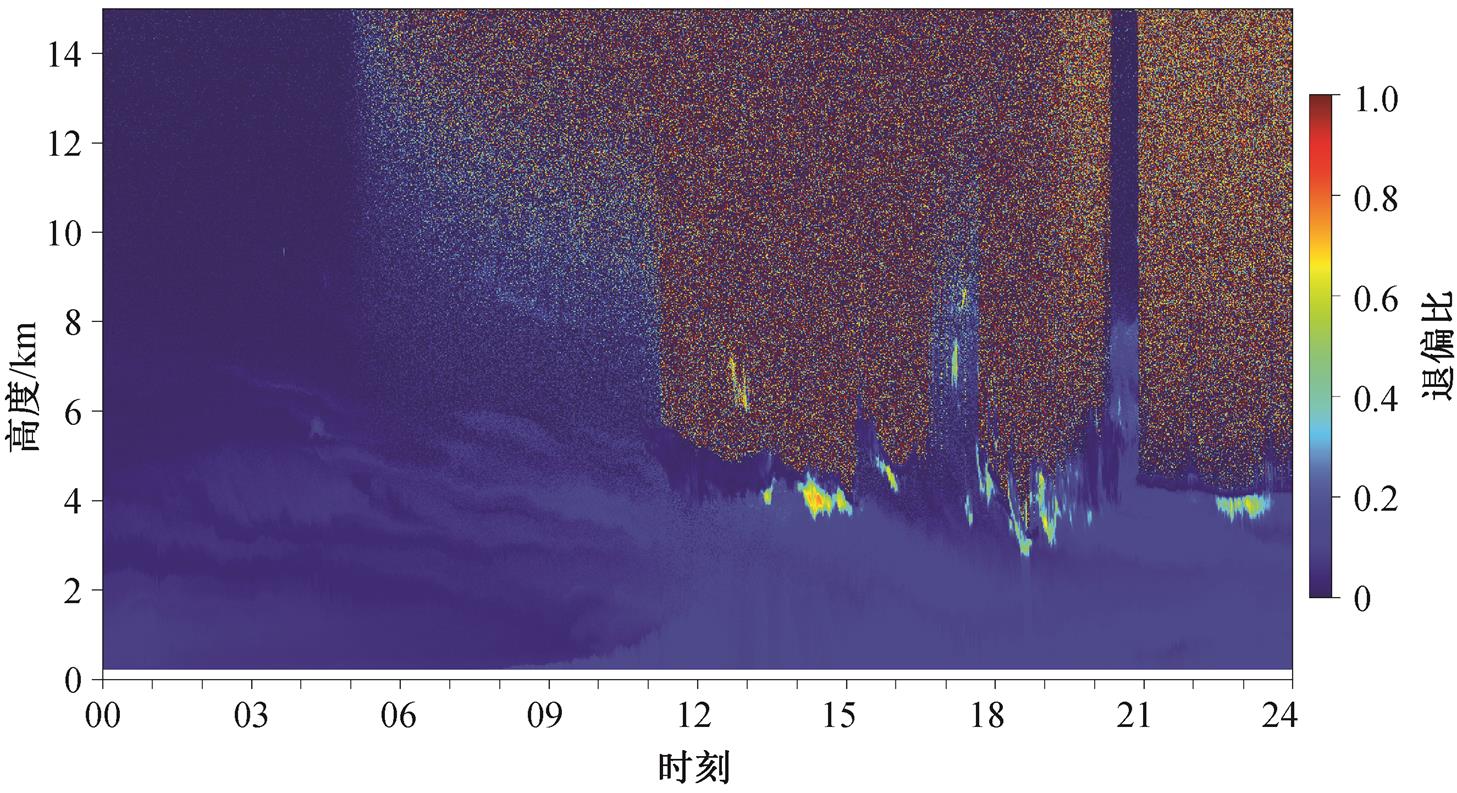
图7 激光雷达退偏比(2016年5月4日)
Fig. 7 Lidar linear volume depolarization ratio on May 4th, 2016
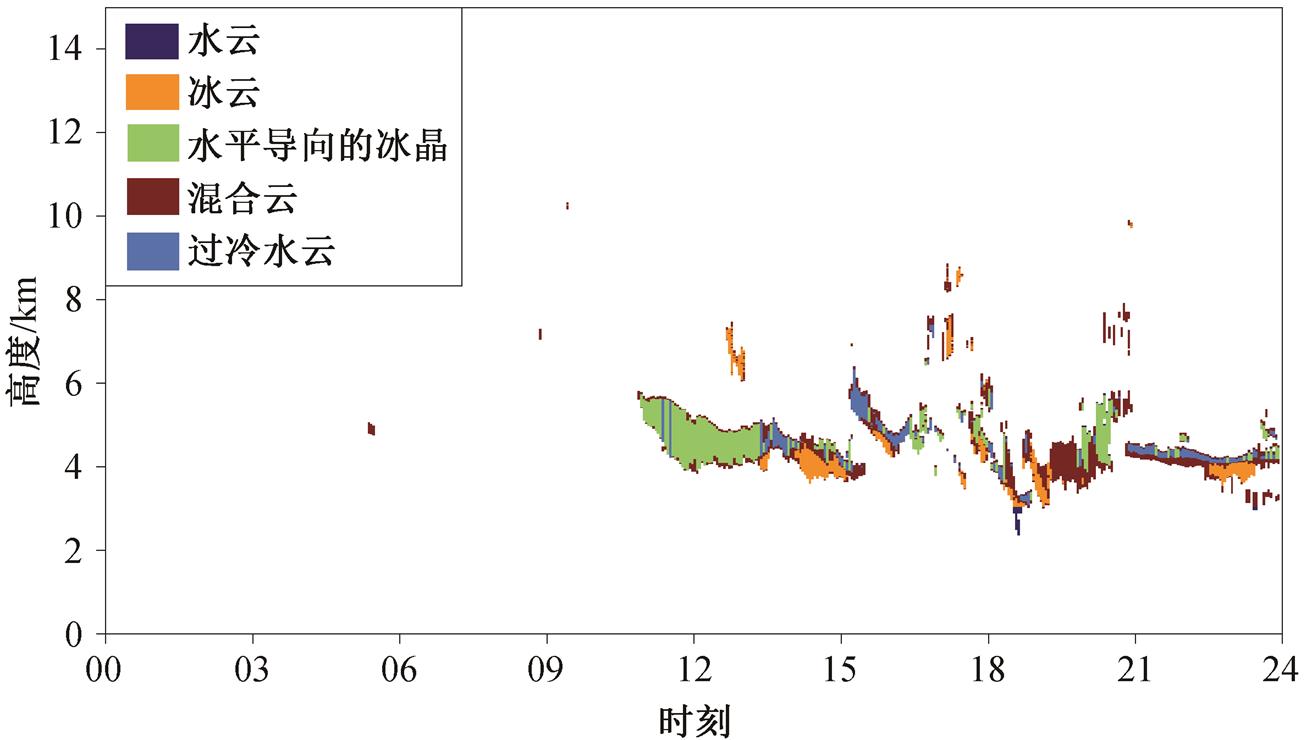
图8 激光雷达云分类结果(2016年5月4日)
Fig. 8 Lidar cloud classification results on May 4th, 2016
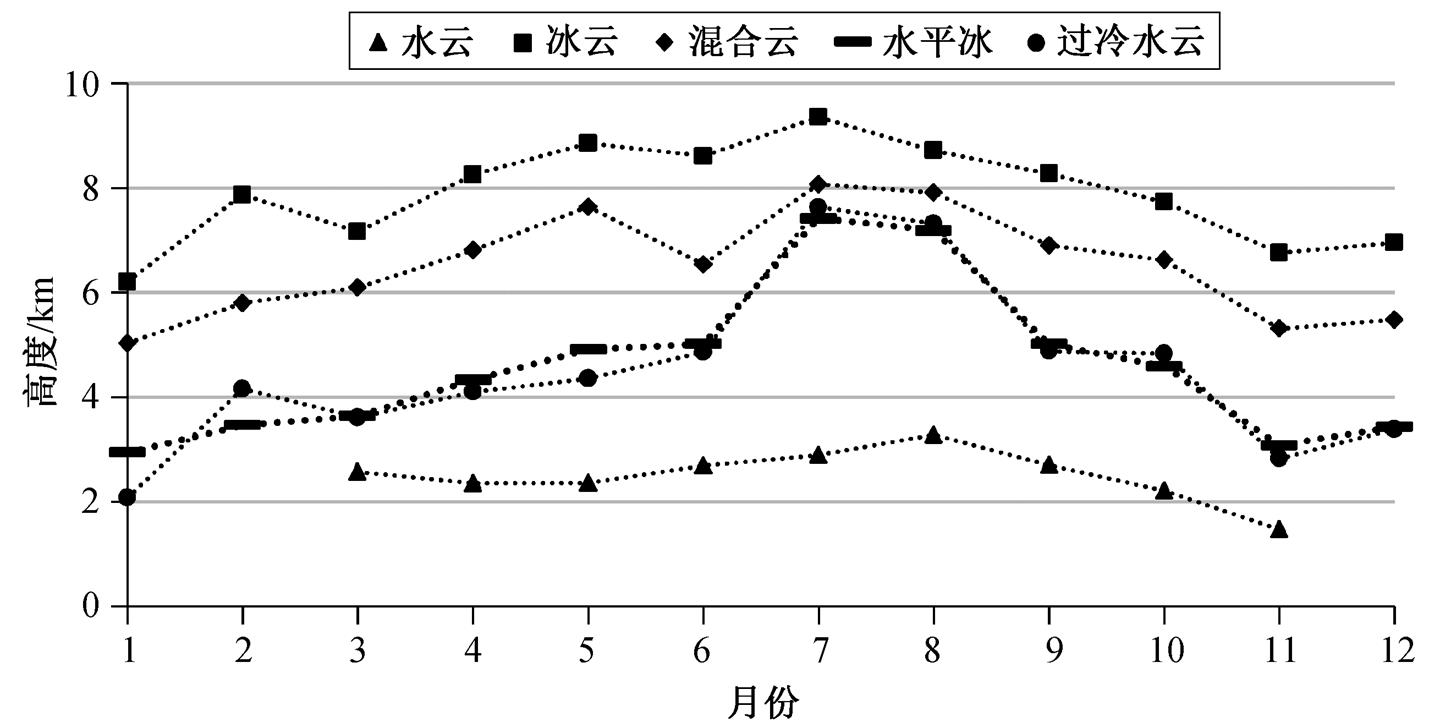
图9 各种类型云层月平均高度变化趋势
Fig. 9 Monthly-averaged cloud layer height of various types of clouds
各种类型云层出现时间的占比情况如图 10 所示。可以看出, 1 月、2 月和 12 月没有出现水云, 其他月份水云占有效数据时间的比例和水云在云中所占比例都与温度正相关; 冰云和混合云在云中所占比例与温度负相关; 水平冰和过冷水没有明显的变化规律。各月份过冷水云在 0~−40℃的云中的占比如图 11 所示, 过冷水云的占比在 8 月、9 月和 1 月出现峰值。
本文利用地基微脉冲激光雷达, 对过冷水云层进行识别, 方法简单易行, 时间分辨率高, 具有其他方法无可比拟的优势。对已有的云识别算法进行改进, 不仅避免了使用分段阈值的不便, 而且结果更准确。
利用长达一年的资料进行分析, 发现观测站点上空过冷水云出现的时间占有云时间的 9.84%, 对于全部 0~−40℃的云, 过冷水云出现的时间占比为11.99%, 过冷水云在8月、9月和1月出现峰值。
在对云的相态进行判别时, 主要依靠不同类型的云滴粒子在退偏比方面的差异。水云、冰云和混合云都很容易区分, 难点在于区分过冷水云与水平导向的片状冰晶。这不仅因为两者的退偏比及激光雷达后向散射信号都极其相似, 而且因为两者之间也存在相互转化和夹杂的情况。因此, 区分过冷水和水平导向的片状冰晶的算法难以做到尽善尽美。

图10 各种类型的云月均出现时间占比
Fig. 10 Monthly-averaged percentages of occurrence of various types of clouds
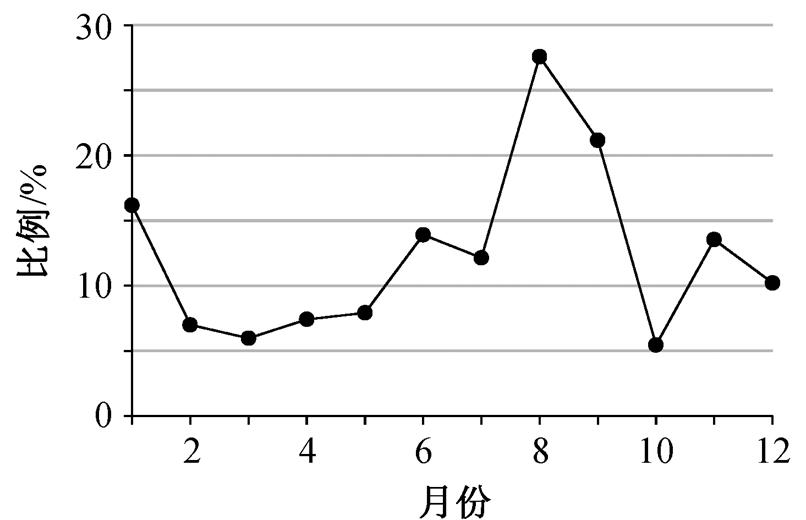
图11 各月份过冷水云在0~−40℃云中的月均占比
Fig. 11 Monthly-averaged percentages of occurrence of supercooled water clouds among clouds with temperature from 0℃ to −40℃
另外, 由于条件限制, 本文采用的温度廓线不是实时获得的, 而是用北京市南郊观象台早晚的探空数据进行平均和插值得到, 因此针对整天进行判断会存在一定的误差。如果条件许可, 今后可以采用飞机探测的云微物理观测结果, 与地基激光雷达进行云相态判别的比对, 也期待与云雷达的观测数据进行比对。
参考文献
[1]Pruppacher H. A new look at homegeneous ice nuc-leation in supercooled water drops. Journal of Atmos-phere Science, 1995, 52(11): 1924‒1933
[2]Wu Juxiu, Wei Ming, Wang Yilin. Retrieval of the supercooled water in stratiform clouds based on Milimeter-Wave Cloud Radar. Journal of Arid Meteo-rology, 2015, 33(2): 227‒235
[3]Hogan R J, Behera M D, O’Connor E J, et al. Esti-mate of the global distribution of stratiform super-cooled liquid water clouds using the LITE lidar. Geophys Res Lett, 2004, 31(5): 325‒341
[4]Hu Y, Rodier S, Xu K, et al. Occurrence, liquid water content, and fraction of supercooled water clouds from combined CALLOP/IIR/MODIS measurements. J Geophys Res, 2010, 115: D00H34
[5]Westbrook C, Illingworth A. Evidence that ice forms primarily in supercooled liquid clouds at tempera-tures >−27℃. Geophys Res Lett, 2011, 38: L14808
[6]Hogan R J, Francis P N, Flentje H, et al. Charac-teristics of mixed-phase cloud: 1. Lidar, radar and aircraft observations from CLARE’98. Q J R Me-teorol Soc , 2003, 129: 2089‒2116
[7]Hogan R J, Illingworth A J, O’Connor E J, et al. Characteristics of mixed-phase cloud: 2. A climate-logy from ground-based lidar. Q J R Meteorol Soc, 2003, 129: 2117‒2134
[8]Shupe M D, Matrosov S Y, Uttal T. Arctic mixed-phase cloud properties derived from surface-based sensors at SHEBA. Journal of the Atmospheric Sci-ences, 2006, 63(2): 697‒711
[9]Shupe M D. A ground-based multiple remote-sensor cloud phase classifier. Geophys Res Lett, 2007, 34: L22809
[10]Luke E P, Kollias P, Shupe M D. Detection of super-cooled liquid in mix-phase clouds using radar Doppler spectra. Journal of Geophysical Research, 2010, 115: D19
[11]严卫, 任建奇, 陆文, 等. 联合星载毫米波雷达和激光雷达资料的云相态识别技术. 红外与毫米波学报, 2011, 130(1): 68‒73
[12]卜令兵, 单坤玲, 吕晶晶, 等. 云和气溶胶探测星载激光雷达及其应用. 光学与光电技术, 2009, 7(4): 62‒64
[13]伯广宇, 刘东, 王邦新, 等. 探测云和气溶胶的机载双波长偏振激光雷达. 中国激光, 2012, 39(10): 203‒208
[14]邱金桓, 郑斯平, 黄其荣, 等. 北京地区对流层中上部云和气溶胶的激光雷达探测. 大气科学, 2003, 27(1): 1‒7
[15]Hu Y, Winker D, Vaughan M, et al. CALIPSO/ CALIOP cloud phase discrimination algorithm. Atmos Ocean Tech, 2009, 26(11): 2293‒2309
[16]Schotland R M, Sassen K, Stone R. Observations by lidar of linear depolarization ratios for hydrometers. Journal of Applied Meteorology, 1971, 10(5): 1011‒ 1017
[17]Zhao Chuanfeng, Wang Yuzhao, Wang Qianqian, et al. A new cloud and aerosol layer detection method based on micropulse lidar measurements. Journal of Geo-physical Research, 2014, 119(11): 614‒616
Identification of Supercooled Water Clouds by Using Micro Pulse Lidar
SONG Jiye1,2, TAN Wangshu1, LI Chengcai1,†, YU Yingli1, LI Jian1, CHU Yiqi1
1. Department of Atmospheric and Oceanic Sciences, School of Physics, Peking University, Beijing 100871; 2. Baicheng Ordnance Test Center of China, Baicheng 137001; † Corresponding author, E-mail: ccli@pku.edu.cn
Abstract On the basis of a previous algorithm of cloud detection, clouds and aerosols are distinguished by analyzing the backscatter signals of a micro pulse lidar. In this way, the content of clouds are classified into ice, water, mixed-phase clouds and horizontal oriented ice flakes. Finally, the supercooled water clouds are dis-tinguished from water clouds by the information of temperature profiles. The monthly changes of the appearance heights and proportions of the various clouds are also calculated with one-year observations over the lidar site. The supercooled clouds are found to appear at 9.84% of all the cloudy time, and 11.99% of all the time for clouds at from 0℃to −40℃.
Key words supercooled water clouds; micro pulse lidar; depolarization ratio; temperature profile
中图分类号 P407
doi: 10.13209/j.0479-8023.2018.022
国家重点研发计划(2016YFC0202004)和国家自然科学基金(41375008)资助
收稿日期: 2017-05-20;
修回日期: 2017-06-16;
网络出版日期: 2018-04-11