
图1 图像原图(a)、LBP图(b)和CSLBP图(c)
Fig. 1 Original image (a), LBP processed (b), and CSLBP processed (c)
程如中1张永军2,†李晶晶1汪国平1雷凯1赵勇1
1.北京大学深圳研究生院信息工程学院, 深圳 518055; 2.贵州大学计算机科学与技术学院, 贵阳 550025; †通信作者, E-mail: zyj6667@126.com
摘要根据CSLBP (center-symmetric local binary pattern)和Uniform LBP (local binary pattern)特征描述行人局部纹理互补性的特点, 提出将二者级联的组合特征用于行人检测: 基于灰度图像的纹理特征(hybrid local binary pattern, HLBP)和基于颜色空间的纹理特征(color based hybrid local binary pattern, CHLBP)。实验结果表明, 当FPPW=10–4时, HLBP特征的检测率为93.96%, 与Uniform LBP 和 CSLBP 特征相比分别提高3.46%和9.68%, 基于颜色空间L′C′C′与HIKSVM分类器结合时的检测率高达98.58%。与传统的纹理特征检测方法相比, 该特征提高了行人检测精度, 降低了误检率, 检测性能得到较大幅度的提升。
关键词行人检测; 基于灰度图像的纹理特征(HLBP); 基于颜色空间的纹理特征(CHLBP); HIKSVM
行人检测是自动驾驶技术中的一个核心算法, 目前面临很多难点。无论是辅助驾驶还是自动驾驶, 都要求行人检测算法既满足检测精度, 又具有实时性。目前检测率高的算法都十分复杂, 需要耗费大量的检测时间, 能够快速检测的算法的检测精度又很难满足要求。因此, 设计一种检测性能理想, 且能够实时响应的算法具有重要的应用价值。
行人检测算法经历了从基于模板和人体模型的方法到基于统计学习的方法的演变。行人检测的开创性成果是Papageorgiou等[1]提出的将Haar小波特征与多项式核SVM分类器结合的算法, 并基于MIT- CBCL行人数据库(MIT-CBCL Pedestrian Data-base)展开实验。Viola等[2]利用积分图的概念, 快速提取Haar小波特征, 提出一种新的AdaBoost学习方法, 该方法自动进行特征选择, 最终通过级联结构来进行行人检测。HOG (Histograms of oriented gradients)特征[3]是目前分辨率最佳的特征之一, 此后提出的很多轮廓特征都是对HOG特征进行改进, 使检测率或检测速度有所提高。在众多纹理信息描述符中, 局部二值模式(local binary pattern, LBP)特征因计算简单、灰度不变性等特点, 广泛应用于人脸识别中。Mu等[4]提出更适合行人检测的semantic LBP (S-LBP)特征和Fourier LBP (F-LBP)特征, 能更好地描述行人局部纹理信息。由于简单的颜色特征对光照变化敏感, 颜色特征极少用于行人检测, 但是任意矩形区域内的颜色相似度(color self-similarities, CSS)是有效表征行人的特征, Walk等[5]将CSS特征与其他特征组合, 进行行人检测。目前, 还不存在一个鲁棒性强的可独立应用于行人检测的颜色特征。
近年来, 在上述特征的基础上, 涌现较多基于特征融合的行人检测方法。Wojek等[6]发现, 将Haar-like, Shapelets, HOG和形状上下文特征进行某种组合后, 其行人检测性能比任意单独的特征描述算符更有效。Wang等[7]提出的基于“LBP+HOG”特征的方法对行人部分遮挡问题有较好的鲁棒性。Hussain等[8]提出基于“LBP+LTP(local ternary pat-terns)+HOG”特征的方法, 可以得到更高的检测率, 并指出LTP特征与LBP特征描述的局部纹理信息之间具有互补性, 将二者结合能提取更广泛的纹理 特征。
本文从特征和分类器两方面着手, 提出基于更高分辨能力的纹理特征, 以及分类能力强且计算简单的分类器行人检测算法, 并提出两种新的混合纹理特征HLBP (hybrid local binary pattern)和CHLBP (color based hybrid local binary pattern)以及两种 组合特征HLBP+HOG和CHLBP+HOG, 同时将这4种特征分别与SVM和HIKSVM分类器结合来验证行人检测算法的性能。
本文提出的HLBP特征是一种组合纹理特征, 是将CSLBP特征和Uniform LBP特征级联, 将组合特征作为单一纹理特征来表征行人特征。该特征集合了CSLBP[9]和Uniform LBP[10]对图像纹理的描述能力, 通过简单的特征提取算法, 在不增加计算复杂度的情况下, 利用较小的特征维度, 实现鲁棒性强的检测性能。LBP特征描述周围像素与中心像素之间的二进制关系以及较详细的局部纹理信息。Uniform LBP是LBP的统计和映射。CSLBP特征描述呈中心对称的两个周围像素点对之间的二进制关系以及较稀疏的局部纹理信息, 与Uniform LBP特征相比, 维度较低。从图1可以看出LBP和CSLBP对局部纹理的不同描述。其中, 图1(a)表示输入的图像, 图1(b)中用像素点的LBP值代替灰度值, 图1(c)中用像素点的CSLBP值代替灰度值。
如图2所示, HLBP特征的提取分为两部分, 首先分别提取CSLBP特征(左侧)和Uniform LBP特征(右侧), 然后将二者级联, 形成最终的HLBP特征。该提取算法并非仅仅将几种成熟的特征组合在一起, 而是通过基于本文算法流程提取的CSLBP特征, 来设计不同的比较实验, 为CSLBP选定检测性能最优的参数。与基于密集描述CSLBP特征的检测算法[11]相比, 该提取算法极大地保持了CSLBP描述符维度低的优势。从图2可以看出, CSLBP特征的提取流程与Uniform LBP特征的提取流程十分相似, 有利于代码的简化和优化, 与任一单个特征相比, 计算复杂度几乎没有增加。特征提取的具体步骤如下。
图1 图像原图(a)、LBP图(b)和CSLBP图(c)
Fig. 1 Original image (a), LBP processed (b), and CSLBP processed (c)
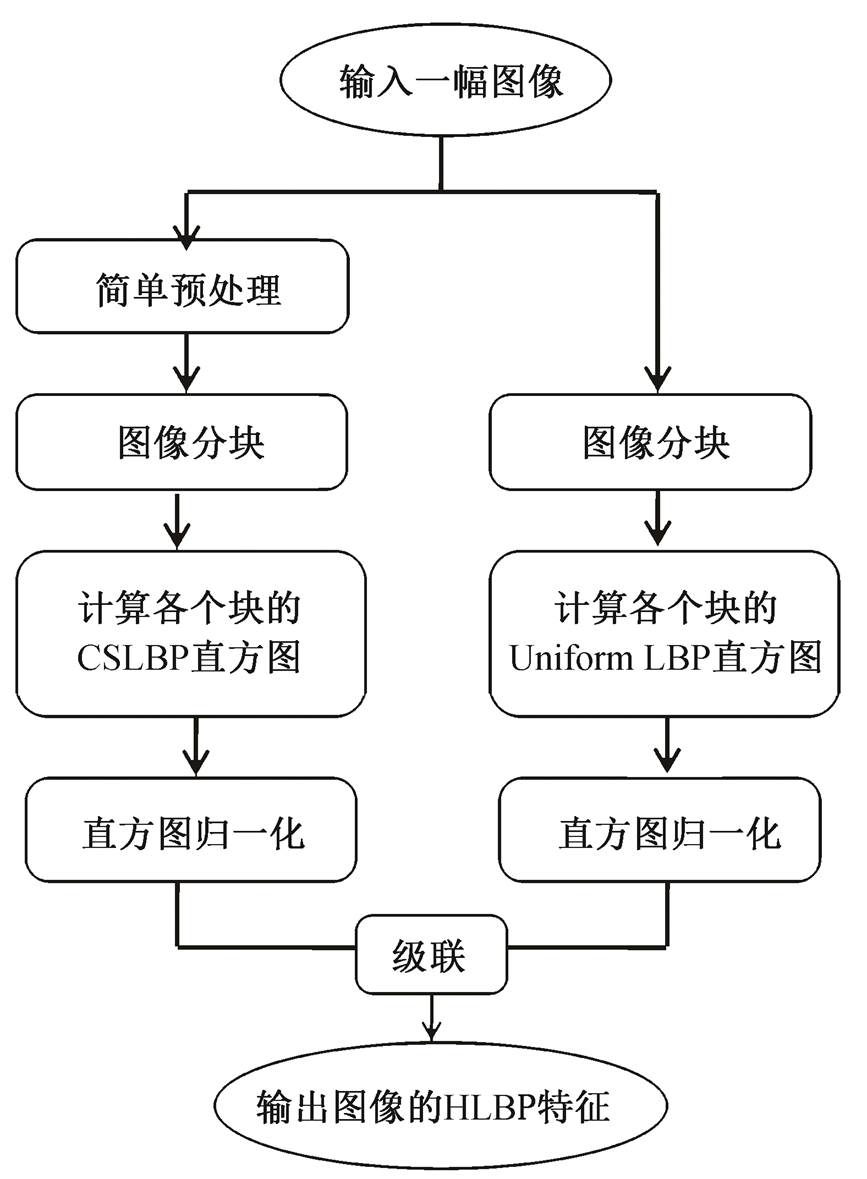
图2 HLBP特征提取流程
Fig. 2 HLBP feature extraction flow chart
1.1.1 简单预处理
在提取 Uniform LBP 特征时, 不需要对图像进行预处理, 简化了该特征的参数选择。在提取CSLBP 特征时, 需要对图像进行简单的处理, 通过实验发现, 这个预处理过程至关重要, 对判决阈值参数t的选择以及最终的检测性能都有重大影响。研究中尝试了两种预处理方式, 分别命名为max方式和0-1方式, 如式(1)和(2)所示:
 , (1)
, (1) , (2)
, (2)
其中 和
和 分别表示图像预处理前、后像素点的灰度值,g_ max和g_ min分别表示所有像素点灰度值的最大值和最小值。
分别表示图像预处理前、后像素点的灰度值,g_ max和g_ min分别表示所有像素点灰度值的最大值和最小值。
1.1.2 图像分块
将输入图像分成若干个相同大小的块, 相邻的块之间有一定程度的重叠(图 3)。对于m×n像素的输入图像, 若块的大小为 width×height, 则横向可生成的块的个数如式(3)所示, 纵向可生成的块的个数如式(4)所示, stride 为检测窗口移动步长。图像总的块的数量block_num=x_num×y_num。
 , (3)
, (3)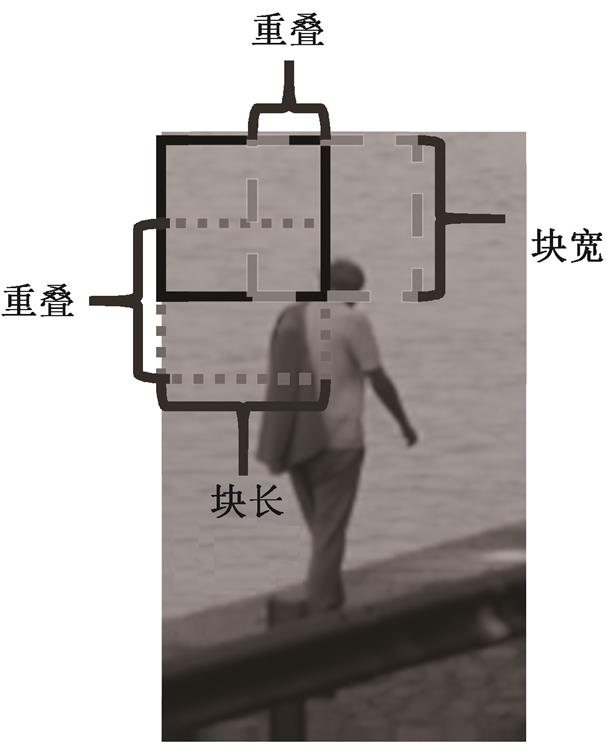
图3 图像分块示意图
Fig. 3 Image block diagram
 。 (4)
。 (4)1.1.3 统计各个块的直方图
1)统计每个块的Uniform LBP特征直方图。首先计算块中每个像素点对应的LBP; 然后, 将LBP模式映射为Uniform LBP值; 最后, 将每个Uniform LBP值都看成一个bin, 统计每个像素点对bin的加权。即根据像素点的Uniform LBP值, 使得相应的bin的幅值加1。
2)统计每个块的CSLBP特征直方图。首先计算块中每个像素点对应的CSLBP值; 然后, 将每个CSLBP值都看成一个bin, 统计每个像素点对bin的加权, 即根据像素点的CSLBP值, 使得相应的bin的幅值加 1。对于Uniform LBP, 本文分别使用r=1,p=8 和r=3,p=8 的模式, 这两种模式表示的中心像素、周围像素以及半径见图 4, 计算过程中涉及的矩形区域的范围分别为 3×3 和 7×7 像素。由于p均为 8, 故两种模式下每个块的直方图的维度均为 59维。对于CSLBP, 仅使用r=1,p=8 模式, 计算过程中涉及的矩形区域的范围为 3×3 像素, 每个块对应的直方图的维度为 16维。

图4 两种扩展LBP描述符示意图
Fig. 4 Two extended LBP descriptors
1.1.4 块的直方图归一化
块的归一化处理对特征的鲁棒性至关重要, 本文采用类似Dalal的归一化处理方式[12], 包括 L1-Norm、L1-Sqrt和 L2-Norm。
1.1.5 级联
级联的过程分为3个步骤。1)将每个分块归一化后的Uniform LBP直方图级联, 形成block_num×59维的向量, 即为最终的图像的Uniform LBP直方图; 2)每个分块归一化后的CSLBP直方图级联, 形成block_num×16维的向量, 即为最终的图像的CSLBP直方图; 3)将图像的Uniform LBP直方图与CSLBP直方图级联, 形成最终图像的HLBP特征直方图, 共block_num×(59+16)维。图5描述105个分块情况下特征的级联过程。
本文提出的HLBP特征是基于灰度图像计算得到的, 灰度图是通过某种计算由彩色图像转化的单通道的图像。显然, 彩色图像比灰度图像包含更加丰富的信息。为了充分地利用各个颜色通道的信息, 本文提出了一种基于颜色空间的局部二进制模式(CHLBP)来描述局部纹理信息。为了提取颜色特征信息, 首先进行颜色空间转换, 然后在该颜色空间各个颜色通道分别按上述步骤计算HLBP特征直方图, 最后将所有颜色通道的颜色直方图串联, 即为最终CHLBP特征直方图(图6)。由于在每个颜色 通道计算得到的HLBP特征直方图的维度为7875维, 故CHLBP特征的维度为7875×3=23625维。
HLBP 特征的关键参数选择包括 Uniform LBP和CSLBP的关键参数选择两方面。通过设计实验, 研究不同参数的特征与线性SVM结合时的行人检测性能, 性能越理想, 则参数越优。实验在INRIA数据库[3]上展开, 初次训练的正负样本分别来自INRIA训练集中的正负样本。训练时的正样本是裁剪的2416个窗口图像, 负样本是随机裁剪的不同的1218×10=12180个窗口图像。随着训练迭代次数的增加, 训练负样本的数目不断累加。测试的正负样本分别来自INRIA测试集中的正负样本。测试正样本是1126个窗口图像, 负样本为随机选取的不同的453×10=4530个窗口图像, 每个窗口图像大小为64× 128像素。本文采用DET曲线[3]评价不同参数的行人检测算法的性能, 曲线越靠近坐标轴表示漏检率越低, 相应的检测率越高, 检测性能越理想。
本文重复Wang等[7]在Uniform LBP实验中关键参数的选择, 得到与其相同的行人检测率。本文提取Uniform LBP特征时使用的参数如下: 1)不对图像进行预处理; 2)图像分块时, 块的大小为16×16像素, 任意两个相邻块之间的重叠为8像素; 3)块的直方图归一化方式选用L1-sqrt; 4)不进行任何加权处理。尽管Cao等[13]的实验结果表明SAD(sum of absolute difference)加权方式能使Uniform LBP 的 性能有一定程度的提升, 但综合考虑算法复杂度以及与CSLBP特征的一致性, 本研究在提取Uniform LBP特征时不进行任何加权处理。该参数是在图2描述的提取算法下, 使得Uniform LBP在行人检测应用上性能相对理想的参数。在此参数下, 分块的数量为105块, 因此最后得到的Uniform LBP直方图的维度为105×59=6195维。
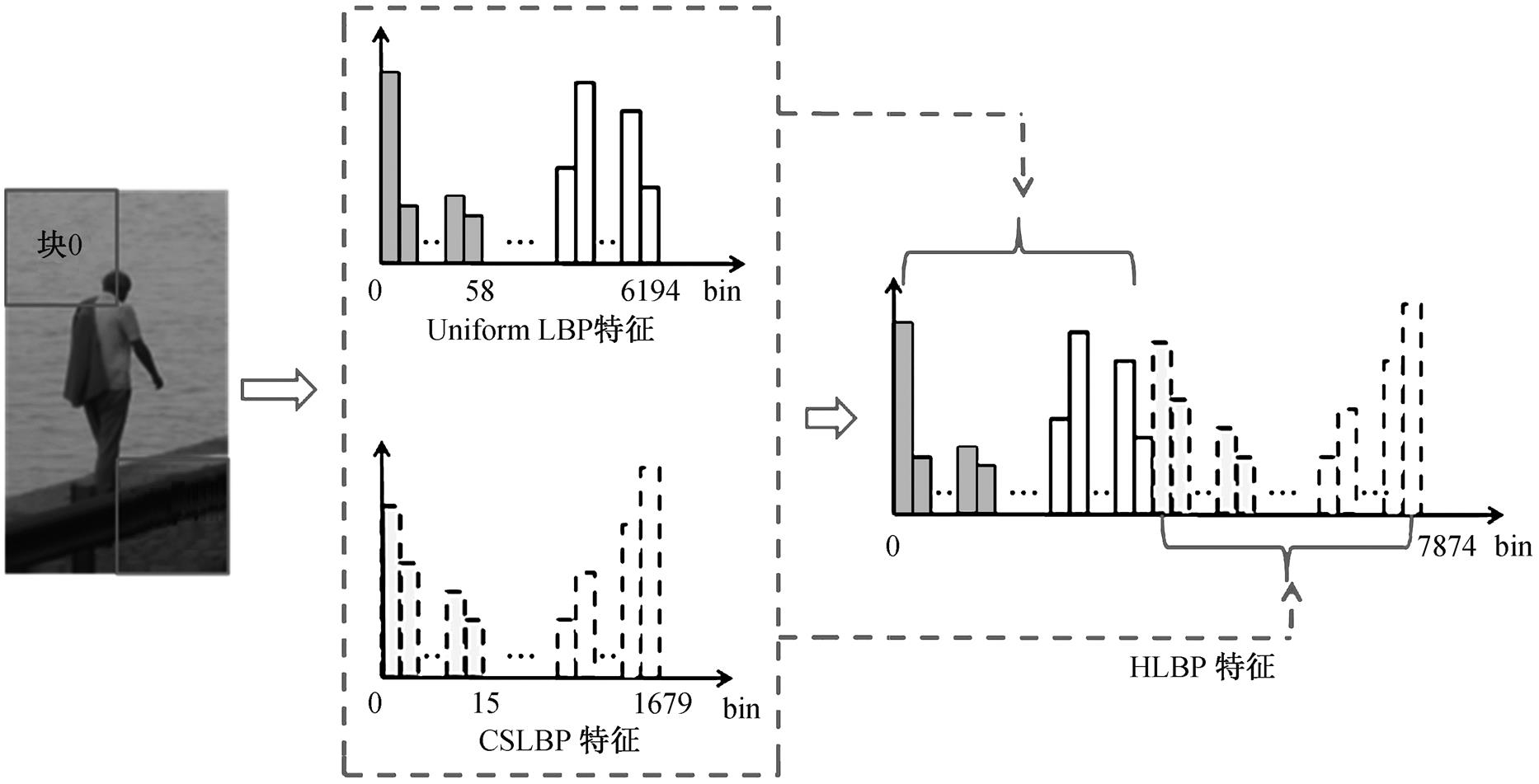
图5 HLBP特征直方图级联过程示意图
Fig. 5 HLBP feature histogram cascading process diagram
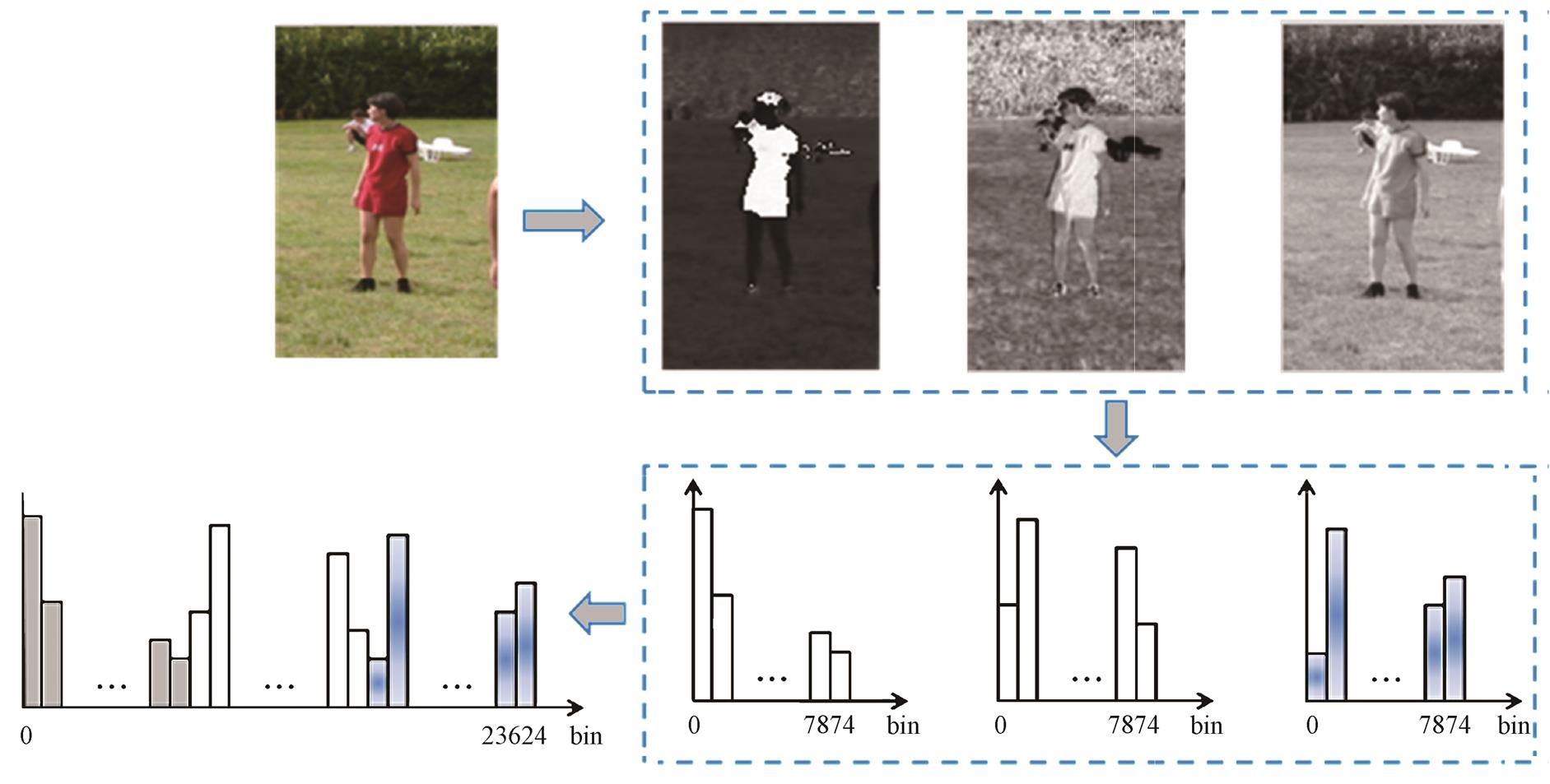
图6 CHLBP特征提取过程示意图
Fig. 6 CHLBP feature extraction process
本文设计5组实验, 分别研究不同的预处理方式、分块方法、阈值、归一化方式以及加权方式对基于CSLBP特征的行人检测算法性能的影响, 并选出使检测性能最理想的参数。设计实验时, 除被考察的特定参数外, 其他参数均是最优选择。
2.2.1 预处理
图7表示不同的预处理方式对行人检测性能的影响。可以看出, 如果不进行预处理, 漏检率会大大提高。没有预处理操作时, SVM训练过程迭代多次才收敛, 并使阈值的选择不稳定。式(1)和(2)描述的max预处理与0-1预处理方式下的检测性能相差无几, 所以本文所有与CSLBP相关的实验均使用 0-1预处理方式。
2.2.2 块之间的重叠
为了考察任意相邻的块之间的重叠对行人检测性能的影响, 本文设置重叠像素个数(overlapping stride)分别为0, 4, 8, 10和12的5组对比实验(0表示相邻的块之间不存在重叠)。图8描述不同重叠像素个数下的检测性能。可以看出, 块之间允许重叠能够极大地改善检测性能, 且随着重叠像素个数的增加, 漏检率逐渐下降。当重叠像素个数为10和12时, 检测效果最好, 但与重叠像素个数为8时相比, 仅有微弱的改善。在FPPW=10–4时, 漏检率分别下降0.89%和1.2%。表1描述块之间的重叠像素个数为0, 4, 8, 10和12时CSLBP特征的维度, 对于不能用式(3)或(4)除尽的分块情况, 采用增加最后两组块的重叠像素个数的处理方式。从表1可以看出, 随着重叠像素的个数增加, 维度也逐渐增加。与重叠像素个数为8时相比, 重叠像素为10和12时的特征维度大幅度提高。综合考虑检测性能、特征维度以及计算的简便性, 将相邻块之间的重叠像素个数为8作为最终选择。
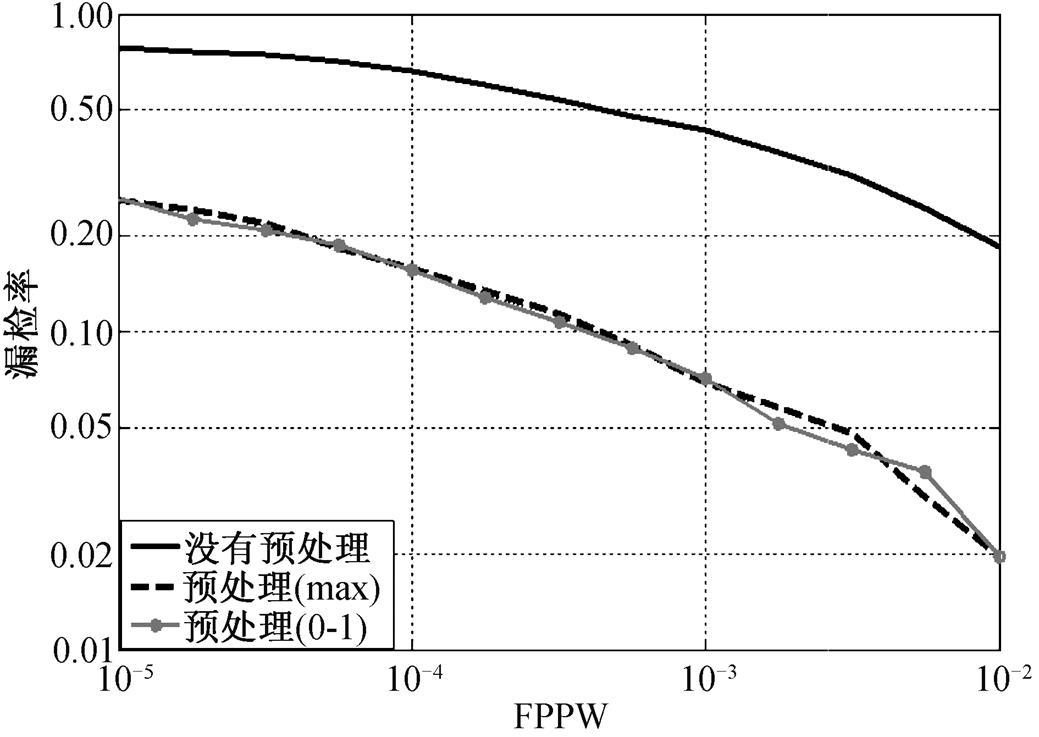
图7 预处理方式对CSLBP性能的影响
Fig. 7 Effects of preprocessing on CSLBP performance
图8 相邻块之间的重叠像素个数对CSLBP性能的影响
Fig. 8 Effects of the number of overlapping pixels on perfor- mance of CSLBP
表1 不同的重叠像素个数时的特征维度
Table 1 Feature dimension by different number of overlapping pixels
2.2.3 阈值
图9描述阈值 的变化对行人检测性能的影响。可以发现, 阈值太大(
的变化对行人检测性能的影响。可以发现, 阈值太大( )或太小(
)或太小( )均不利于检测性能。当阈值在0.02~0.08之间时, 检测效果相差不大, 本文选用
)均不利于检测性能。当阈值在0.02~0.08之间时, 检测效果相差不大, 本文选用 。
。
2.2.4 归一化方式
图10描述L1-Norm, L1-Sqrt和L2-Norm这3种归一化方式下的检测性能。可以发现, 归一化方式对检测性能的影响显著。L1-Sqrt方式下的漏检率最低, L2-Norm次之, L1-Norm的检测效果最差。当FPPW=10–4时, L1-Sqrt 的漏检率为15.7%, 比 L2- Norm低4.6%左右, 比L1-Norm低14.7%左右。
2.2.5 加权方式
本文还考察了SAD加权方法对CSLBP特征性能的影响。SAD加权发生在块的直方图统计步骤, 即像素点对相应bin的幅值的加权不再是1, 而是该像素点的SAD值。SAD值是8个周围像素点与中心像素点灰度值之差的绝对值的和, 如式(5)所示:
 , (5)
, (5)其中, 和
和 分别表示周围像素点和中心像素点的灰度值。
分别表示周围像素点和中心像素点的灰度值。
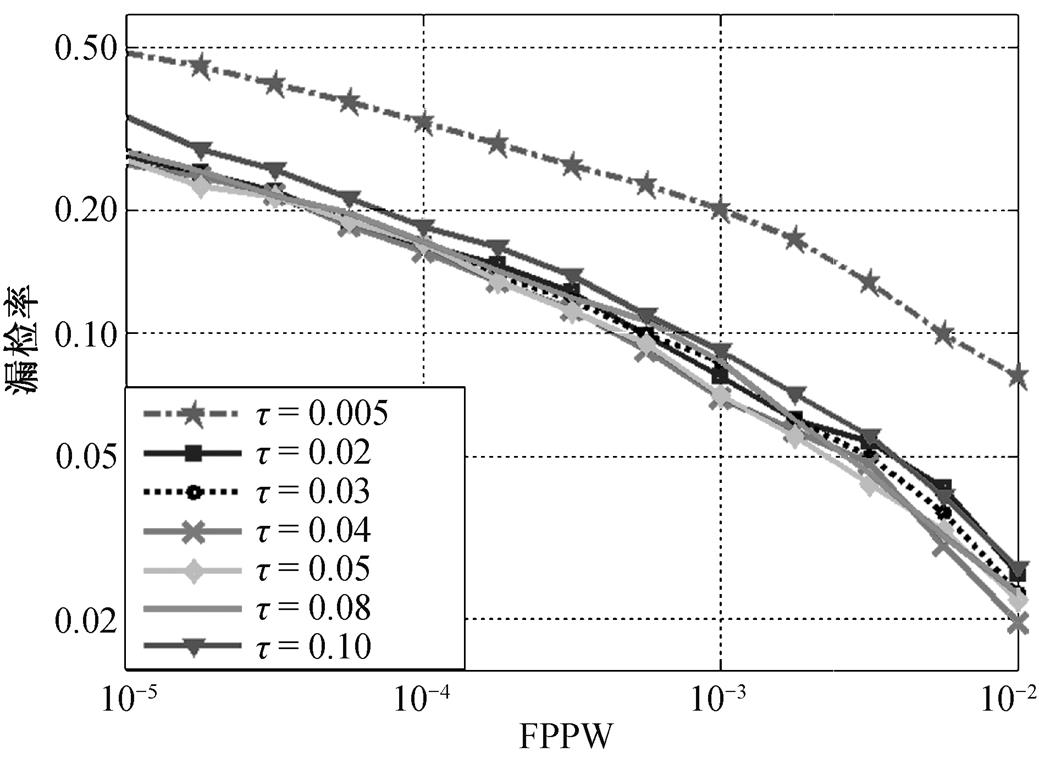
图9 阈值对CSLBP性能的影响
Fig. 9 Effect of threshold on CSLBP performance
图10 归一化方式对CSLBP性能的影响
Fig. 10 Effect of normalized on CSLBP performance
图11描述SAD加权对检测性能的影响。可以发现, SAD加权后的漏检率反而增加, 因此本文提取CSLBP特征时, 不进行任何加权处理。
综上所述, 提取CSLBP特征时使用的参数如下: 1)对图像进行 0-1 预处理; 2)图像分块时, 块的大小为16×16像素, 任意两个相邻块之间的重叠个数为 8 像素; 3)块的直方图归一化方式选用 L1-Sqrt; 4)不进行任何加权处理。该参数是在图2描述的提取算法下, 使得CSLBP在行人检测应用上性能相对理想的参数。在此参数下, 将图像分成105个块, 最后得到的CSLBP直方图维度为105×16=1680维。将最优参数下Uniform LBP和CSLBP的特征级联, 即可构建最优的HLBP特征。经过最优参数选择, HLBP特征直方图的维度为6195+1680=7875维, 其中6195维是Uniform LBP特征直方图的维度, 1680维为CSLBP特征直方图的维度。
图11 SAD加权对CSLBP性能的影响
Fig. 11 Effect of SAD weighting on CSLBP performance
我们从3个方面证明HLBP特征的鲁棒性。首先, 将 HLBP 与 HOG 特征进行比较, 证明该特征具有高分辨率。如图12所示, HLBP 的曲线远远地落在 HOG 特征的下方, 表示 HLBP 的漏检率远远低于 HOG 特征。当 FPPW=10–4时, HLBP特征的检测率为93.96%, 比HOG特征提高5%左右。
图12 不同的纹理特征的行人检测性能
Fig. 12 Performances of different texture features
然后, 将HLBP特征与其他纹理特征进行比较, 证明HLBP特征的优越性。从图12可以看出 不同纹理特征在行人检测时的性能(包括CSLBP, Uniform LBP, Uniform 2-scale LBP以及HLBP特征), 其中, Uniform 2-scale LBP特征是r=1,p=8与r=3,p=8模式构成的级联。4个特征的检测曲线在纵轴方向依次排列, HLBP特征的检测性能最好, Uniform 2-scale LBP特征次之, 之后是Uniform LBP特征, CSLBP特征的检测效果最差。表2列出4种纹理特征的维度以及当FPPW=10–4时的行人检测率。可以看出, 尽管Uniform 2-scale LBP与HLBP特征的检测效果相差较小(0.9%左右), 但是HLBP特征的维度有较大的降低; HLBP特征的检测率比Uniform LBP高3.46%, 比CSLBP高9.68%。
最后, 通过研究4种不同的纹理特征分别与HOG和CSS结合后的性能, 证明HLBP用于特征组合时优于其他纹理特征。图13描述4种不同的纹理特征与HOG结合后的检测性能, 图14描述它们与CSS特征结合后的检测性能。可以看出, 基于4种组合特征算法的性能在纵轴上的排列顺序与基于4种纹理特征算法的性能在纵轴上的排列顺序相同, 说明即使与其他特征组合, HLBP相对于其他纹理特征的优势仍然保持。综合考虑检测效果和特征维度可以得出, HLBP特征的鲁棒性非常好。
表2 不同单一特征的维度以及检测率
Table 2 Dimensions of different single features and detection rate

图13 不同的纹理特征与HOG结合时行人检测的性能
Fig. 13 Performance when feature combined with HOG
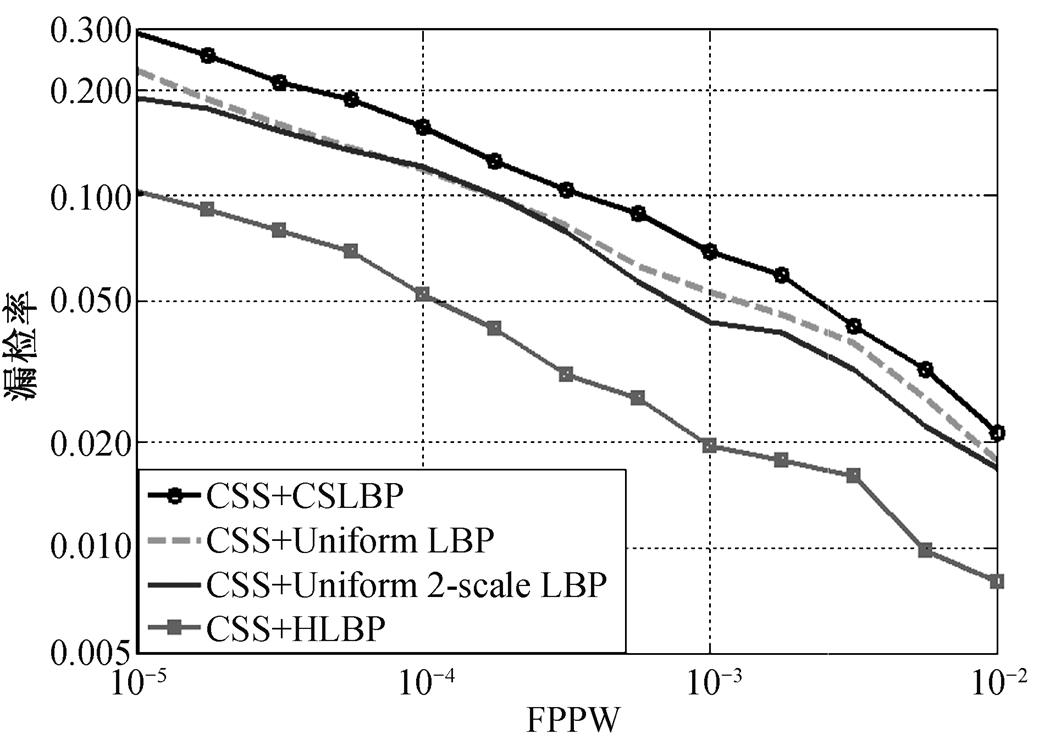
图14 不同纹理特征与CSS结合时行人检测的性能
Fig. 14 Performance when combined with texture features and CSS
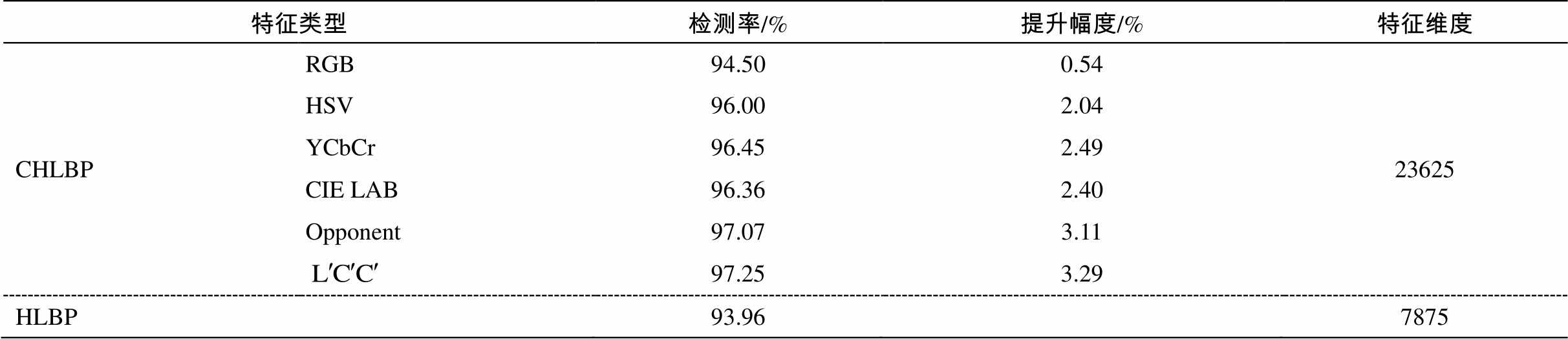
本文研究在RGB, HSV, CIE LAB, YCbCr, Opponent和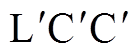 6种颜色空间提取的CHLBP特征的行人检测性能, 如图15所示。与基于灰度图的HLBP相比, 基于颜色空间的CHLBP特征的性能均有改善, 但改善的程度因颜色空间不同而不同, 且在FPPW不同的取值范围, 改善程度在纵轴上的排列也有差异。因此可以根据实际情况, 在适合的颜色空间提取CHLBP特征。表3列出FPPW=10–4时, 基于6种颜色空间的CHLBP特征的行人检测率及其比HLBP特征的检测率提高的幅度。可以看出, CHLBP特征检测率的增益以高维度为代价。
6种颜色空间提取的CHLBP特征的行人检测性能, 如图15所示。与基于灰度图的HLBP相比, 基于颜色空间的CHLBP特征的性能均有改善, 但改善的程度因颜色空间不同而不同, 且在FPPW不同的取值范围, 改善程度在纵轴上的排列也有差异。因此可以根据实际情况, 在适合的颜色空间提取CHLBP特征。表3列出FPPW=10–4时, 基于6种颜色空间的CHLBP特征的行人检测率及其比HLBP特征的检测率提高的幅度。可以看出, CHLBP特征检测率的增益以高维度为代价。
图15 基于不同颜色空间的CHLBP特征的行人检测性能
Fig. 15 Performance of CHLBP based on different color space
表3 不同颜色空间的CHLBP特征的检测率(FPPW=10–4)
Table 3 Detection rate of CHLBP features in different color spaces (FPPW=10–4)
HLBP特征描述图像的局部纹理信息, 且计算复杂度低; HOG特征描述行人的轮廓信息; CSS特征表述块的颜色自相似度。这3种特征从3个方面描述图像, 与基于单种特征的行人检测算法相比, 基于三者不同组合的特征能进一步提高行人检测率。
图16描述HLBP+HOG特征的检测性能。可以看出, 二者结合后的性能比HOG特征有大幅度的提升, 比HLBP特征有小幅度的提升。当FPPW=10−4时, HLBP+HOG特征的检测率为95.3%左右, 比HOG特征提高6.6%左右, 比HLBP特征提升1.3%左右。
图17 描述 HLBP+CSS 特征的检测性能。可以看出, 与CSS特征相比, 将二者结合后的性能有很大程度的改善, 但与HLBP特征相比, 性能改善程度较微弱。当FPPW=10–4时, CSS特征的检测率为58.3%左右, 进一步证明颜色特征不适合作为单一的特征用于行人检测。
图 18 描述将 HLBP, HOG和CSS 特征任意两个组合以及3个特征组合时的性能, 这4种组合方式的特征维度以及FPPW=10–4时的检测率见表 4。可以看出, HLBP+HOG的检测效果最好, HLBP+HOG+ CSS的检测效果反而比有些两两组合的检测效果差。
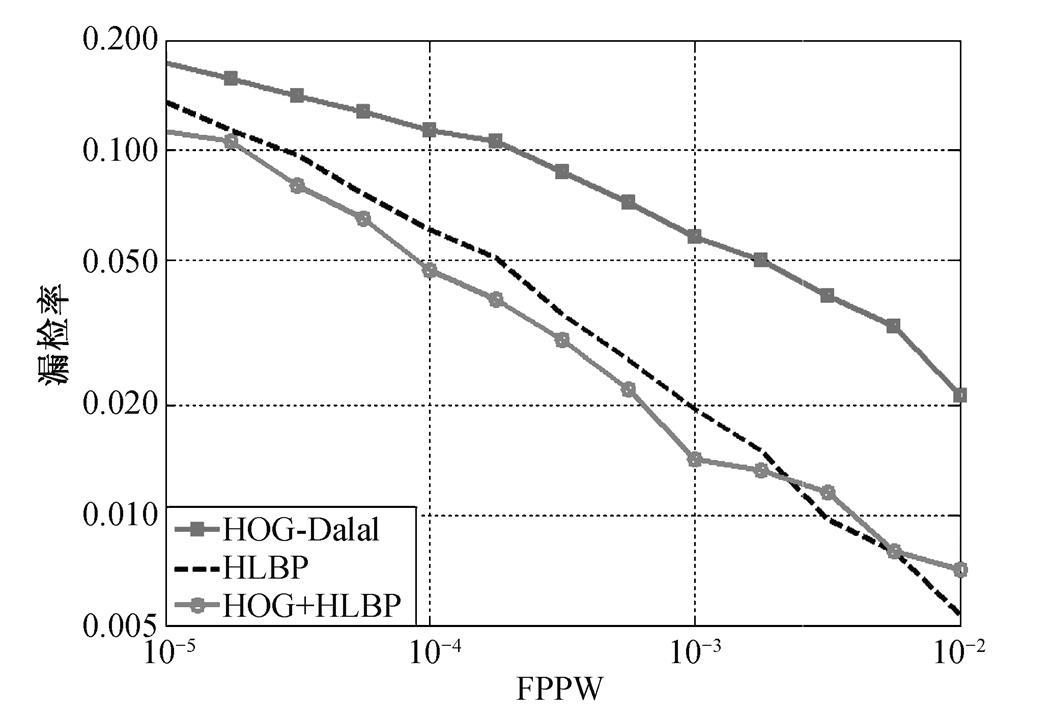
图16 HLBP+HOG特征的行人检测性能
Fig. 16 Performance of the HLBP + HOG feature
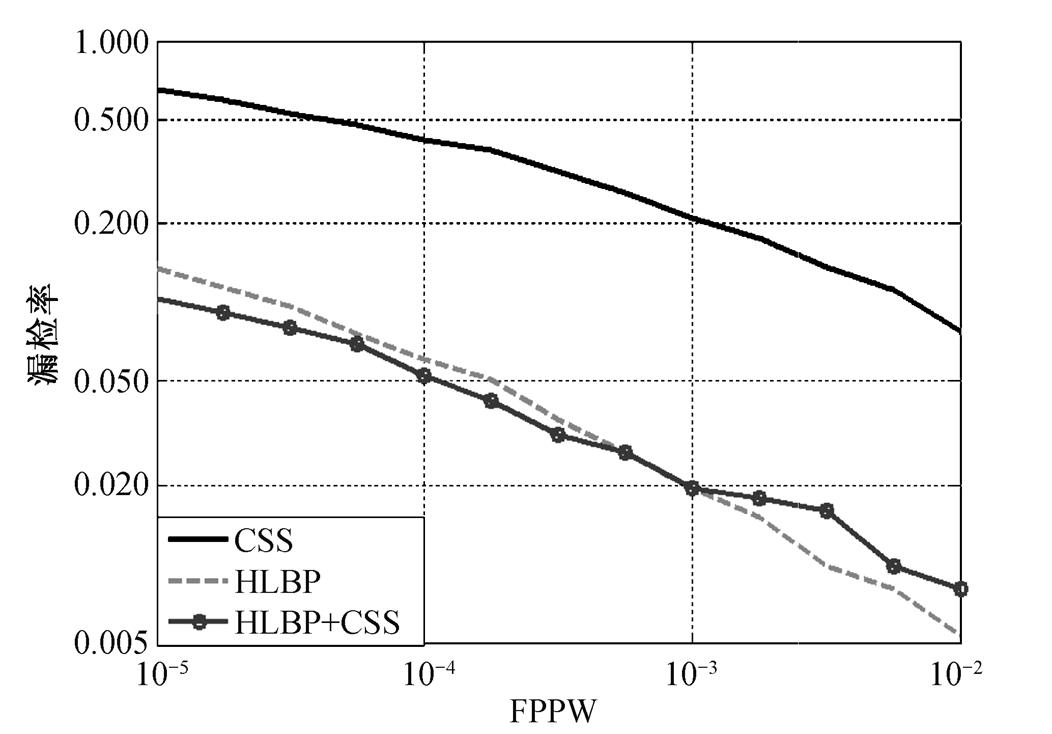
图17 HLBP+CSS特征的行人检测性能
Fig. 17 Performance of the HLBP + CSS feature
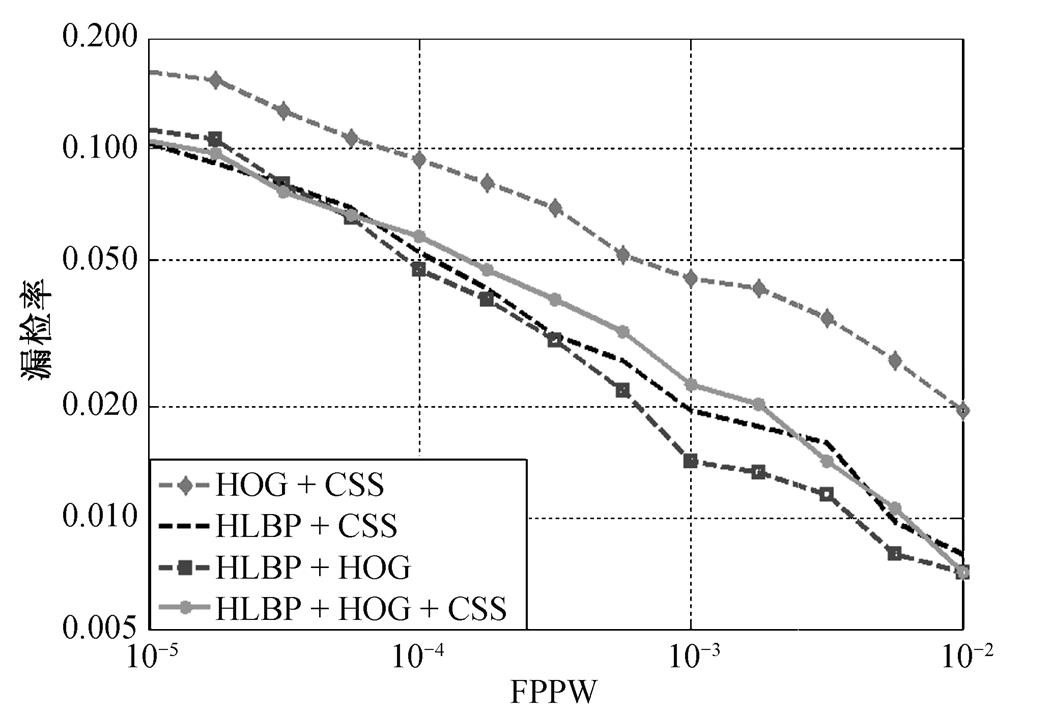
图18 HLBP+HOG+CSS特征的行人检测性能
Fig. 18 Performance of the HLBP + HOG + CSS feature
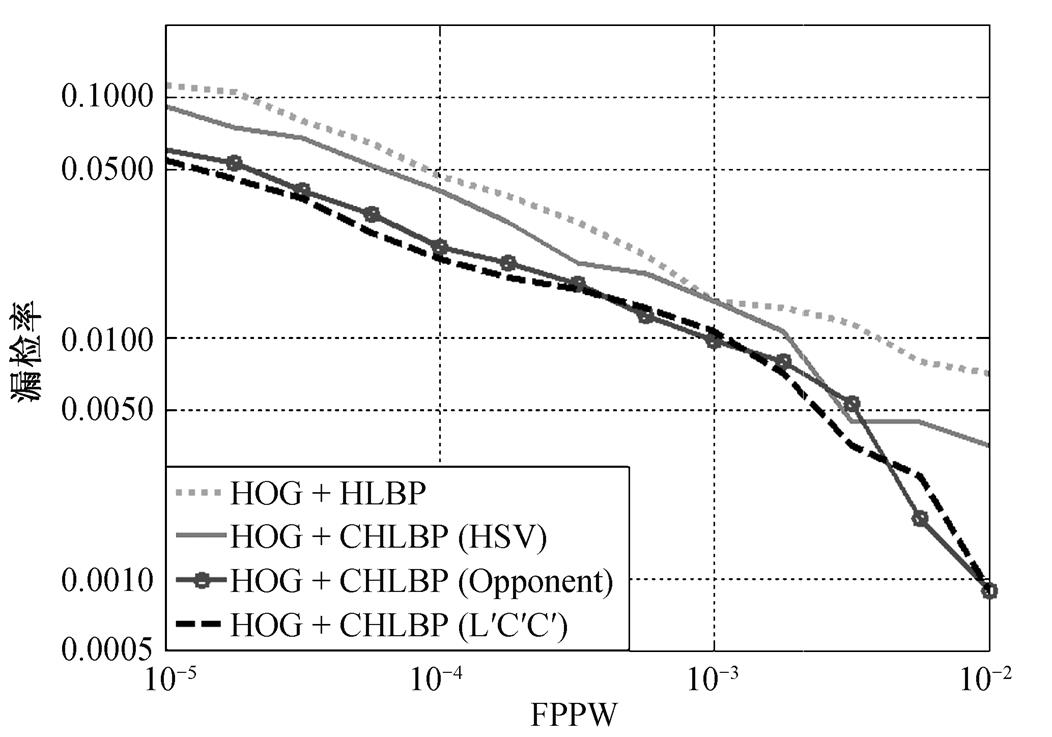
图19 基于不同颜色空间的 CHLBP+HOG 特征的行人检测性能
Fig. 19 Performance of CHLBP+HOG feature in different color spaces
在 3 种有代表性的颜色空间 HSV, Opponent和中, 研究基于不同的颜色空间CHLBP特征与基于灰度图像HOG特征融合时行人检测的性能。
表4 不同的组合特征的维度
Table 4 Dimension of different combination of features

如图 19 所示, 基于颜色空间特征的 3 条性能曲线落在基于灰度图像 HOG 特征的性能曲线下方, 即 CHLBP+HOG 特征下的检测率比 HLBP+HOG特征有进一步提高。CHLBP+HOG 特征在 Opponent和颜色空间的表现优于 HSV, 而在 Opponent和颜色空间的检测率非常相似。当 FPPW =10–4时, 基于 HSV, Opponent 和颜色空间的CHLBP+HOG 特征的检测率分别为 95.9%, 97.6% 和97.87%。
研究基于灰度图像的HLBP特征以及HLBP+ HOG特征与HIKSVM分类器结合后行人检测算法的性能(除特别标注外, 默认使用的分类器为线性SVM)。这两个特征与线性 SVM 以及 HIKSVM 结合时的检测性能如图 20 所示。可以看出, 同等特征与HIKSVM 结合时的性能优于与线性 SVM 结合时的性能; 与同样的分类器结合时, 组合特征HLBP+ HOG的性能优于单一纹理特征HLBP。4种曲线在FPPW=10–4时的检测率见表 5。
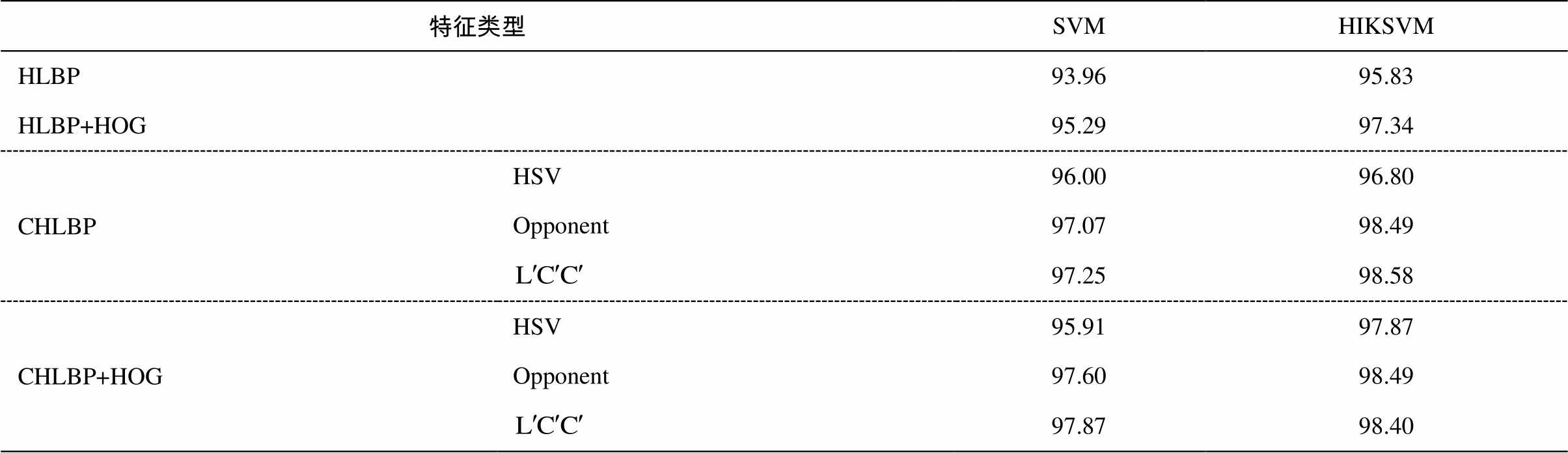
比较CHLBP, CHLBP+HOG特征分别与线性SVM和HIKSVM分类器结合时行人检测算法的性能。图21表示在HSV, Opponent和颜色空间提取的两种特征与两种分类器结合时的检测性能。可以看出, 同样的特征与 HIKSVM 结合时的检测率比与线性 SVM 结合时高。4 条曲线在 FPPW = 10–4时的检测率见表 5。
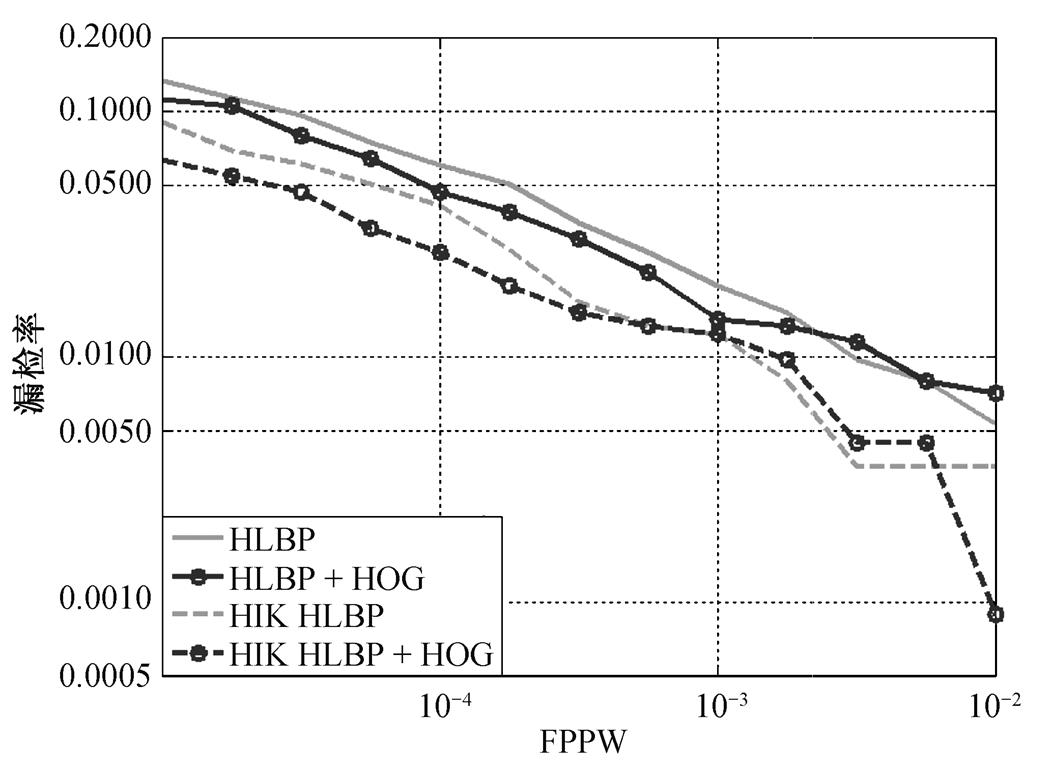
图20 HLBP, HLBP+HOG与SVM以及HIKSVM组合时的行人检测性能
Fig. 20 Performance of HLBP, HLBP+HOG combined with SVM and HIKSVM
表5 不同特征与SVM和HIKSVM结合时的性能比较(%)
Table 5 Performance comparison of different features combined with SVM and HIKSVM (%)
基于HSV, Opponent以及颜色空间的CHLBP, CHLBP+HOG 特征与 HIKSVM 结合时行人检测率如图 22 和 23 所示。可以发现, 基于颜色空间特征的 3 条性能曲线总落在基于灰度图像特征性能曲线下方; CHLBP和CHLBP+HOG 特征在Opponent, 与颜色空间的漏检率曲线比较接近, 且远远地落在 HSV 空间特征的性能曲线下方, 它们在 FPPW=10–4时的检测率如表5所示。
本研究提出的行人检测算法均在 INRIA 行人数据库上展开, 各组实验的结果表明: HLBP特征是具鲁棒性的纹理特征, 性能优于Uniform LBP和CSLBP特征, 在FPPW=10–4时, 检测率比HOG特征高 5%左右。在本研究提出的所有行人检测算法中, 同样的特征与 HIKSVM 分类器结合使得检测性能进一步提升。基于 L′C′C′空间的 CHLBP 特征与HIKSVM 分类器相结合的算法整体性能最好, FPPW =10–4时的检测率最理想, 高达 98.58%, 其性能在目前行人检测算法中排在前列。
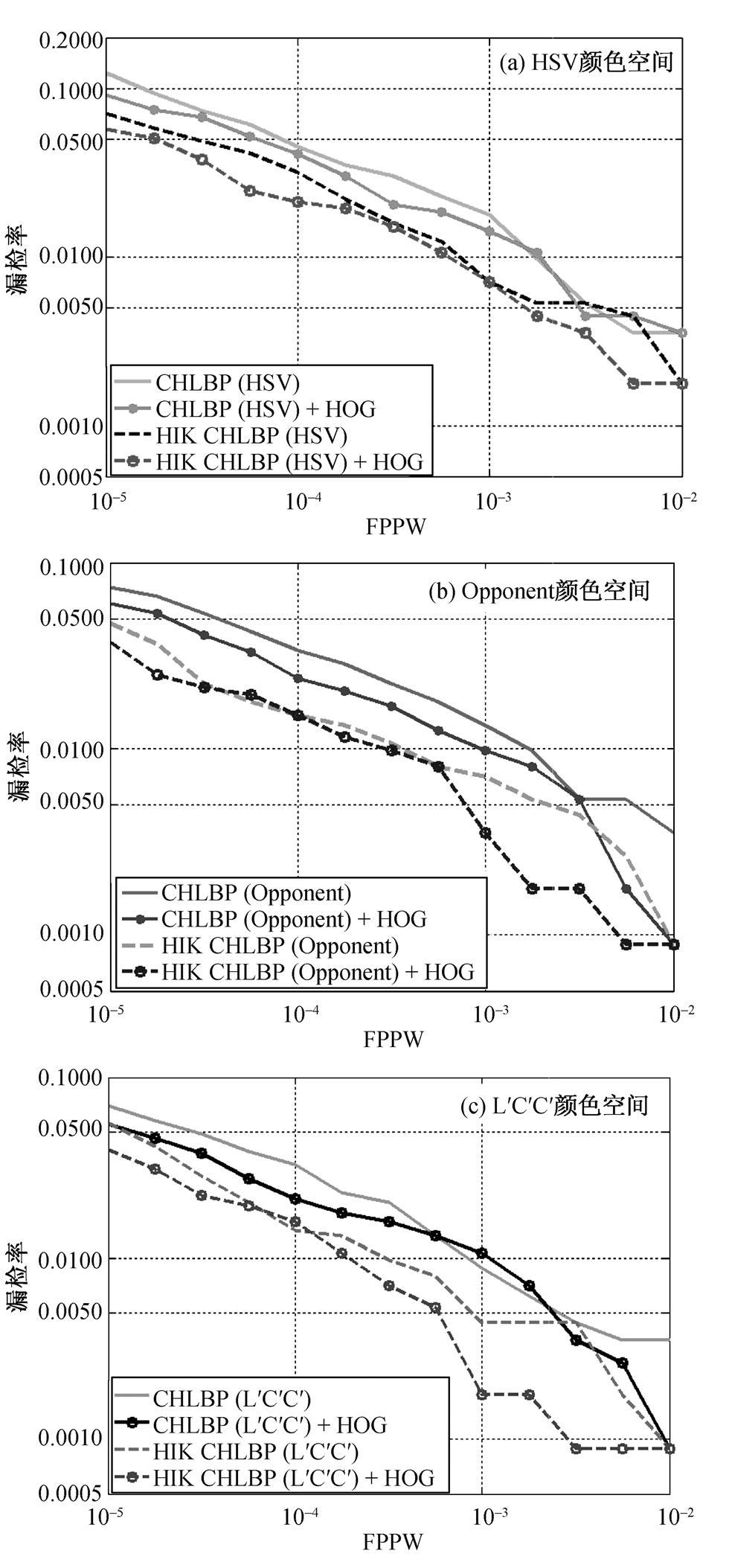
图21 CHLBP, CHLBP+HOG分别与SVM以及HIKSVM组合时的行人检测性能
Fig. 21 Detection performance of CHLBP, CHLBP + HOG combined with SVM and HIKSVM

图22 与HIKSVM结合不同颜色空间的CHLBP行人检测性能
Fig. 22 Performance of HIKSVM with CHLBP in different color space
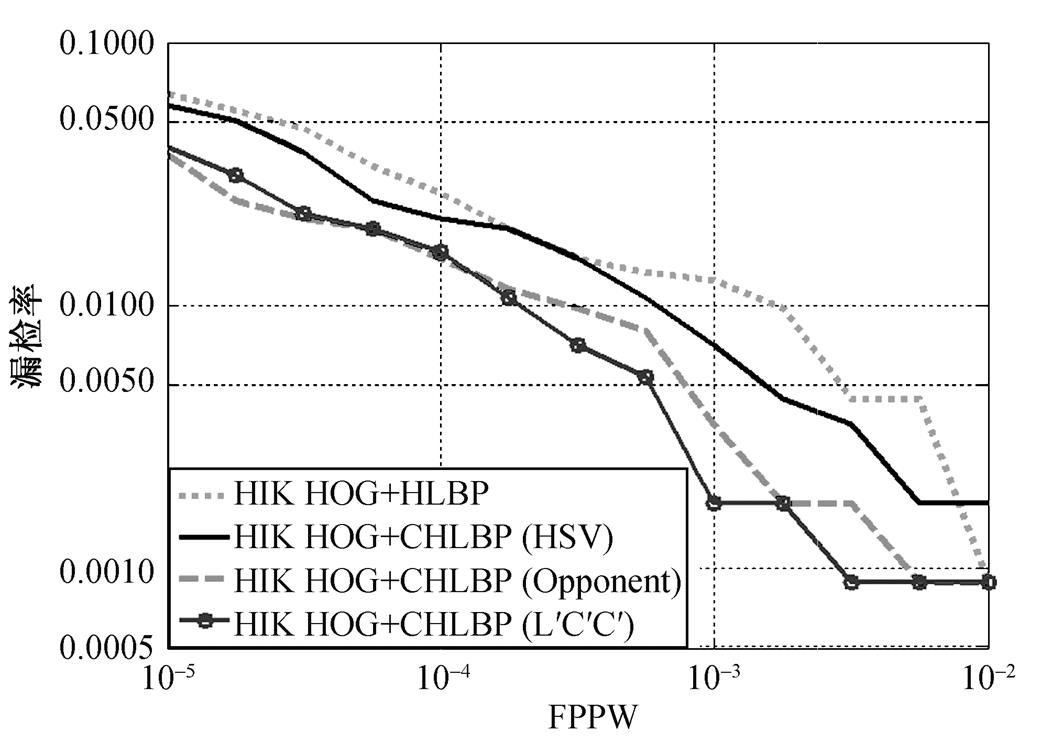
图23 与HIKSVM结合不同颜色空间的CHLBP+HOG 行人检测性能
Fig. 23 Performance of HIKSVM with CHLBP + HOG in different color space
参考文献
[1]Papageorgiou C, Poggio T. A trainable system for object detection. International Journal of Computer Vision, 2000, 38(1): 15–33
[2]Viola P, Jones M. Rapid object detection using a boosted cascade of simple features // Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Hawaii, 2001: 511
[3]Dalal N, Triggs B. Histogram of oriented gradients for human detection // 2005 IEEE Conference on computer vision and pattern recognition. San Diego, 2005: 886–893
[4]Mu Y, Yan S, liu Y et al. Discriminative local binary patterns for human detection in personal album // IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, AK, 2008: 1–8
[5]Walk, Stefan, et al. New features and insights for pedestrian detection // IEEE conference on Computer vision and pattern recognition. San Francisco, 2010: 1030–1037
[6]Wojek C, Schiele B. A performance evaluation of single and multi-feature people detection // Procee- dings of the 30th DAGM symposium on Pattern Reco- gnition. Munich, 2008: 82–91
[7]Wang Xiaoyu, Tony X, Yan Shuicheng. An HOG-LBP human detector with partial occlusion handling // IEEE 12th International Conference on Computer Vi- sion. Kyoto, 2009: 32–39
[8]Hussain S U, Triggs W. Feature sets and dimensiona-lity reduction for visual object detection // British Ma- chine Vision Conference, 2010: 112.1–112.10
[9]Heikkilä M, Pietikäinen M, Schmid C. Description of interest regions with local binary patterns. Pattern recognition, 2009, 42(3): 425–436
[10]Ojala T, Pietikäinen M, Harwood D. A comparative study of texture measures with classification based on featured distributions. Pattern Recognition, 1996, 29 (1): 51–59
[11]Maji S, Berg A, Maliks J. Classification using inter- section kernel support vector machines is efficient // IEEE Conference on Computer Vision and Pattern Re- cognition. Anchorage, AK, 2008: 1–8
[12]Dalal N. Finding people in images and videos [D]. Paris: INRIA, 2006
[13]Cao Yunyun, Sugiri P, Hirofumi N. Local binary pattern features for pedestrian detection at night/dark environment // 18th IEEE International Conference on Image Processing (ICIP). Brussels, 2011: 2053–2056
The HLBP and CHLBP Features for Pedestrian Detection
CHENG Ruzhong1, ZHANG Yongjun2,†, LI Jingjing1, WANG Guopin1, LEI Kai1, ZHAO Yong1
1. School of Electronic and Computer Engineering, Peking University Shenzhen Graduate School, Shenzhen 518055; 2. College of Computer Science and Technology, Guizhou University, Guiyang 550025; † Corresponding author, E-mail: zyj6667@126.com
AbstractTwo improved texture features (hybrid local binary pattern, HLBP) and (color based hybrid local binary pattern, CHLBP) which are based on gray image texture and color space are proposed for pedestrian detection. The experimental results show that, when FPPW is 10–4, the detection rate of HLBP is 93.96% which is about 3.46% and 9.68% higher than Uniform LBP and CSLBP respectively. At the same time, when combined with the HIKSVM classifier, CHLBP feature based on L′C′C′ space makes the detection rate up to 98.58%, and its detection performance has been greatly improved, by this method an good result could be obtained in pedestrian detection.
Key wordspedestrian detection; HLBP; CHLBP; HIKSVM
中图分类号P312
doi:10.13209/j.0479-8023.2018.017
贵州大学引进人才科研基金(贵大人基合字(2016) 49号)资助
收稿日期:2017-07-21;
修回日期:2017-09-10;
网络出版日期:2018-06-11